2.3.2 计划行为理论
TRA对于个体行为的解释在外界因素可控的情况下,被较广范围的证实是有效的。但是Liska(1984)指出:TRA的适用范围仅仅是自主行为,它并未包括习惯性行为和需要资源的行为(即需要技术、能力、机会或者与别人合作的行为)。即当研究出现非意识因素和不可控制因素的影响时,TRA模型解释力变弱,存在相当的局限性。因此一些学者认为,应当优化和延伸理性行为理论。Ajzen(1985)在理性行为理论的基础上加入感知行为控制(Perceived Behavior Control,PBC)这一变量,提出了计划行为理论(Theory of Planned Behavior,TPB),以期提高模型对个体行为预测和解释的准确性,其结构模型如图2-6。
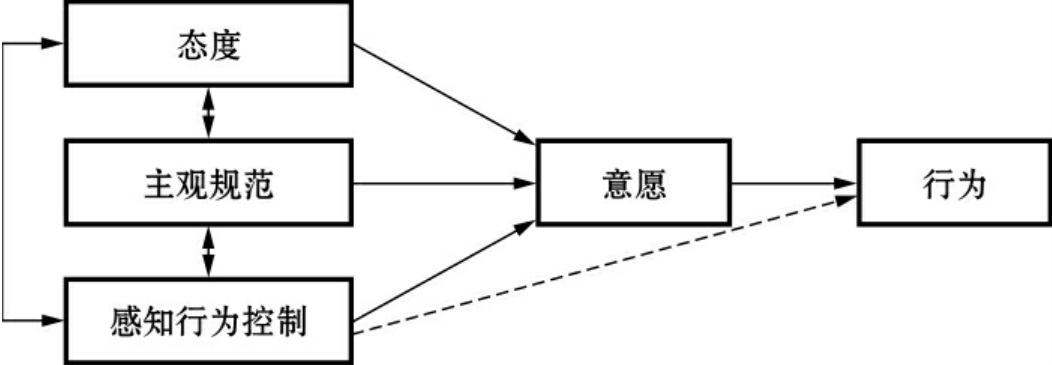
图2-6 计划行为理论框架
(来源:Ajzen & Driver,1991)(https://www.daowen.com)
计划行为理论和理性行为理论的区别在于前者有三个独立的意愿决定变量,其中与理性行为理论共有的变量是行为态度和主观规范,增加了一个变量感知行为控制。感知行为控制则是独立于理性行为理论之外的新增变量,是指感知到执行某一行为的容易或是困难程度,即个体感知到为了完成某种行为所必须的机会和资源(时间、金钱、技能、与他人之间的合作等)的丰富程度,反映了个体对某个行为过去的经验和预期的阻碍。因此,感知行为控制是受到个人采取行为所需要的资源与机会,以及资源和机会对行为的重要程度所决定。当个体认为所得到的机会和资源越多,预期的阻碍就会越小,对行为的控制力就越强。感知行为控制是计划行为理论中的重要变量,它不仅影响到行为的意愿,还与行为意愿共同直接预测个体的行为完成。
不少学者对感知行为控制的构成进行了分析,Pedersen(2003)提出由“自我效能”与“便利条件”两个因素构成。自我效能指个人对自己所拥有采取某项行为的资源、机会或阻碍多寡的认知。而便利条件指这些资源、机会或阻碍对行为的影响程度(Ajzen & Fishbein,1989)。而Ajzen & Madden(1986)认为“认知行为控制”除了会影响“行为意愿”外,亦对“实际行为”产生直接影响。
计划行为理论解释了个体在无法完全控制他们的行为的情况下的态度、行为意愿和行为之间的关系。多数实证研究表明,增加了认知行为控制之后的模型,提高了对行为的预测能力(Beale & Manstead,1991;Borgida,Conner & Manteufel,1992;DeVellis,B lalock & Sandler,1990)。
在理性行为模型中加入认知行为控制产生的计划行为理论更为全面,而对新媒体的应用而言,其需要一定的技能和资源。因此,加入感知行为控制因素将提升模型的预测能力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






