1.P_Mode指令的使用
在实际工程应用中,同一个设备往往需要在多种模式下进行控制,例如设备可以由操作员通过HMI面板控制,可以由编辑好的PLC程序进行控制,可以通过手动模式控制,可以在维修的情况下模拟控制,可以在忽略联锁和允许的条件下控制等等。为此,罗克韦尔自动化将常用的控制模式封装起来做成P_Mode AOI指令,用户可以在具体应用中直接调用该指令块,或者在其它AOI指令中嵌套P_Mode指令,非常方便。下面将详细介绍P_Mode指令。
P_Mode提供的控制模式有五种,分别为Operator(操作员)模式、Program(程序)模式、Override(超驰)模式、Maintenance(维修)模式、Hand(手动)模式。各种模式的描述见表3-7。
表3-7 P_Mode模式表
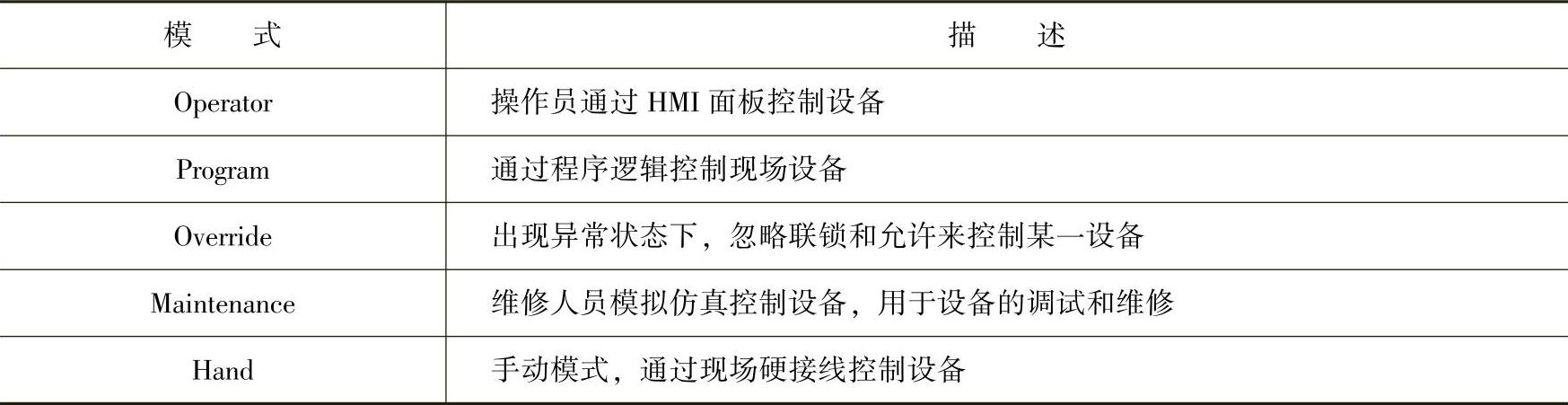
用户可以根据实际需要实现不同模式的切换,为此该指令块已经将五种模式的优先级设置完成。优先级由高到低分别为Hand(手动)模式、Maintenance(维修)模式、Override(超驰)模式、Program(程序)模式和Operator(操作员)模式,其中程序模式和操作员模式处于同一优先级,所以P_Mode指令为Program(程序)模式和Operator(操作员)模式提供了锁存功能,即当Program(程序)模式被锁存后将不能自动切换到Operator(操作员)模式,反之亦然。流程如图3-71所示。
对于Hand(手动)模式,当Inp_Hand=1为外部输入请求手动模式,Sts_Hand=1为当前的模式状态为手动模式。Override(超驰)模式和Maintenance(维修)模式亦然。
P_Mode指令的内部逻辑包括外部输入模式命令使模式中间变量置位,从而选择相应的模式,对于程序模式和操作员模式,还包括模式的锁存和解锁。下面以程序模式为例,说明P_Mode指令的内部逻辑。如图3-72所示,PCmd_Acq为请求程序模式命令。当发出请求命令时,置位程序模式的中间变量。PCmd_Rel为释放程序模式命令,当发出释放命令时,复位程序模式的中间变量。请求和释放程序模式必须在操作员模式没有被锁存的条件下才能完成。其它模式的选择同理。
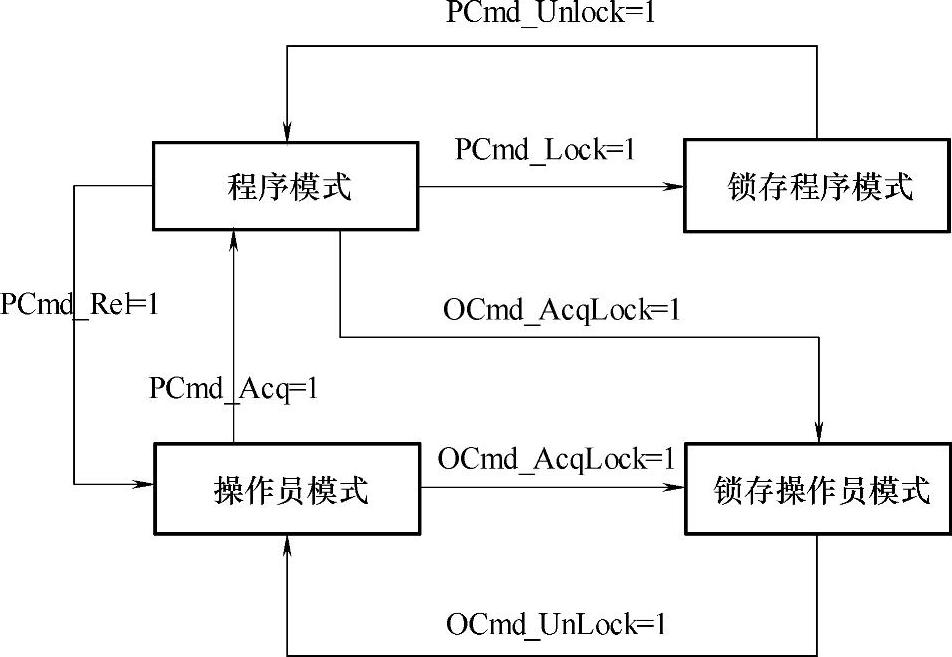
图3-71 程序和操作员模式转换流程图
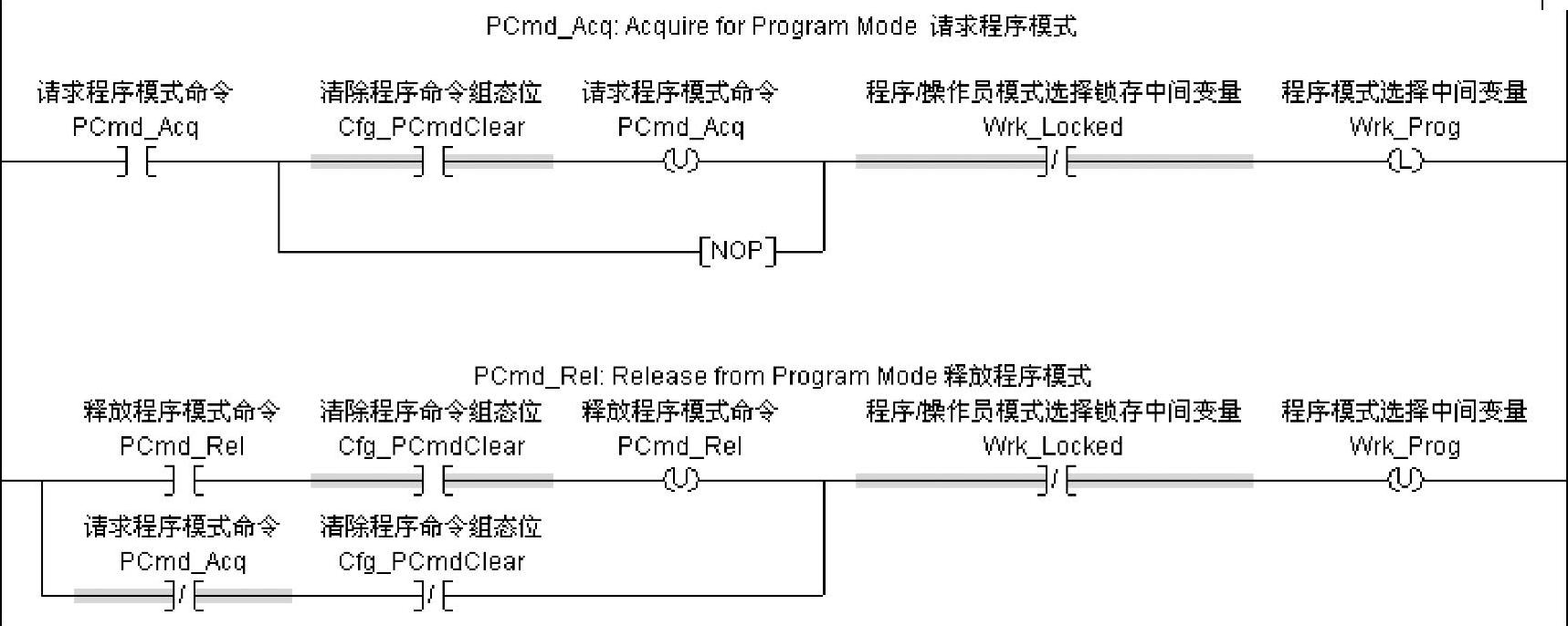
图3-72 请求和释放程序模式
对于Hand和Override模式,当发出模式输入命令后,触发模式状态位。对于Mainte-nance、Program和Operator,当中间变量被置位时,触发模式状态位。如图3-73所示,可以明显看出模式的优先级。Hand优先级最高,Program和Operator优先级最低。
对于Program模式和Operator模式,由于两者处于同一优先级,P_Mode指令提供了锁存和解锁的功能。图3-74以程序模式为例,当选择该模式时,发出锁存和解锁模式命令,置位和复位锁存的程序模式中间变量。需要注意的是,当程序模式的中间变量被锁存时,即使发出请求操作员模式命令,也不能切换到操作员模式。必须将程序模式解锁后才可以切换。
2.P_VSD指令的使用
P_VSD变速驱动AOI指令是通过使用变频器(交流变频或直流),使其工作在不同的模式下,来调节电动机的转速,并监测故障状态信息。该变频器可以是交流(变频)或直流的,可以通过控制网络或者硬接线形式的模拟量或数字量I/O与电动机相连。P_VSD指令可以应用在所有的AB公司变频器,同时也可以应用在其它调速产品,通过数字量I/O,实现如起、停、运行信号或者模拟量I/O,如转速给定或者转速反馈。需要注意的是P_VSD适应于连续的转速调节,而不是选择多个离散的转速。
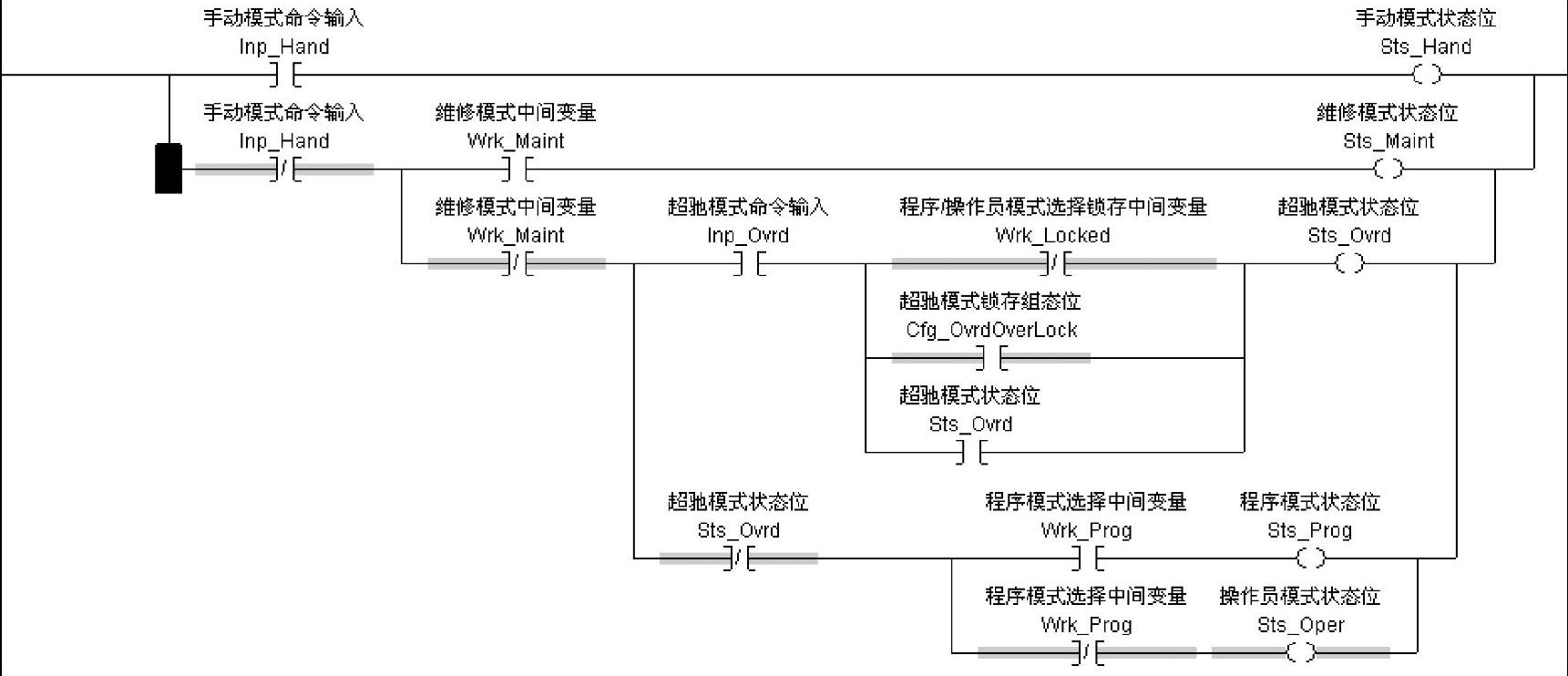
图3-73 模式状态选择程序
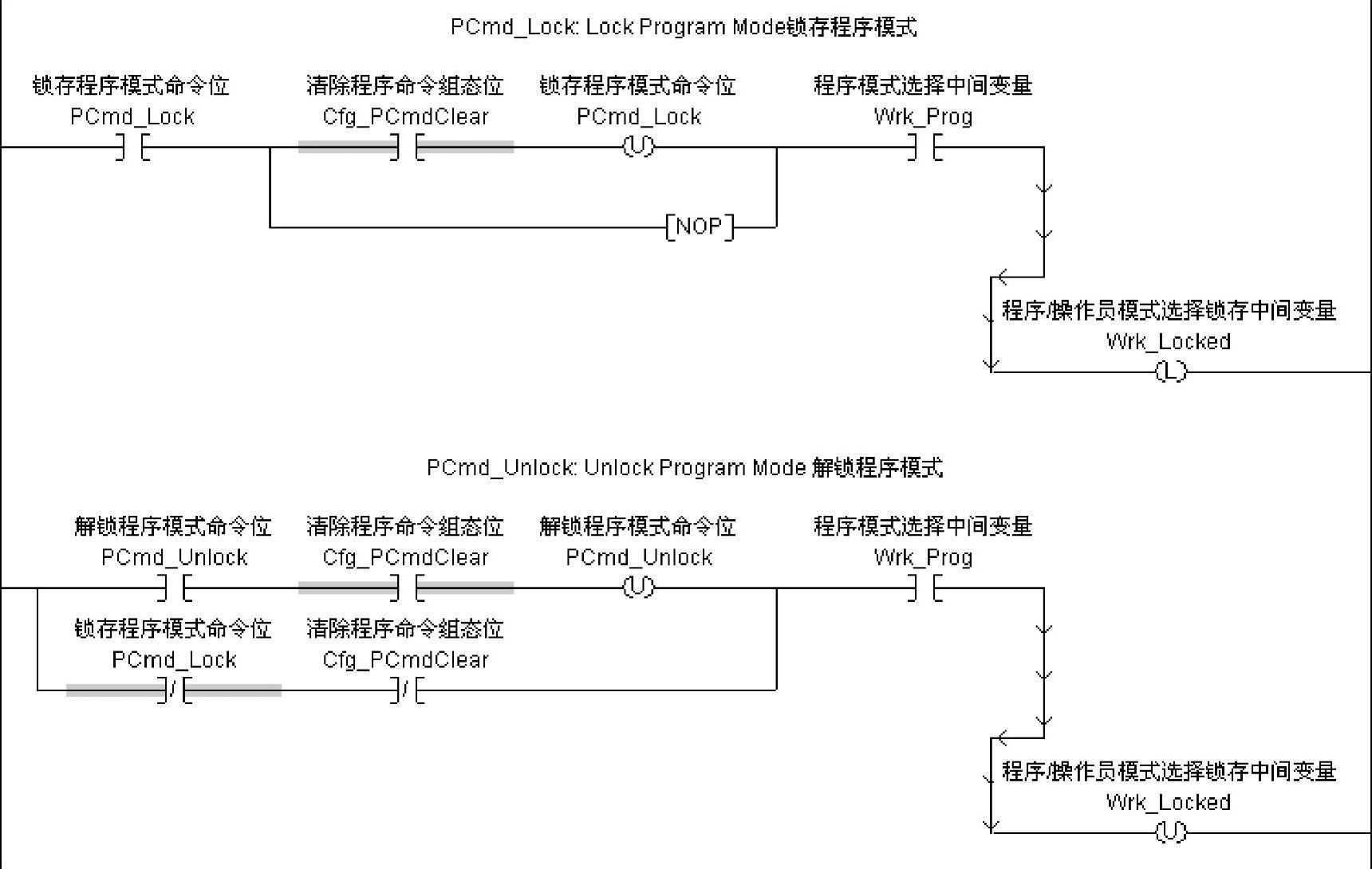
图3-74 锁存和解锁程序模式(https://www.daowen.com)
P_VSD具有以下功能:
1)嵌入P_Mode指令,有多种模式可供选择。
2)具有起动停止变频器和电动机的能力,控制变频器速度(通过转速给定),通过监视变频器运行状态和转速反馈来确认变频器是否处于运行或者停止状态。
3)提供报警和急停信号,当变频器没有正常启动、停止或者在一定的响应时间内,反馈没有跟随给定命令。
4)可对速度参考值进行工程单位的整定。提供变频器转速反馈值从变频器单位到用户单位(工程单位)的整定。
5)读取变频器状态信息并显示故障代码,显示变频器加速、减速、达速和报警状态,提供正转反转命令,显示实际的旋转方向。
6)在允许变频器启动的条件下提供允许(可被旁路或者不可旁路的允许),在不允许变频器起动或必须停止变频器的情况下提供联锁。当联锁产生变频器停止时产生报警。提供维修模式可旁路掉(可以被旁路的)允许和联锁。
7)监测IO故障输入,当IO故障时,停止变频器。
使用P_VSD指令需要16及以上版本的RSLogix 5000软件及Logix系列控制器和5.0及以上的版本Factory Talk View SE。
P_VSD指令中嵌入了P_Mode指令,图3-75以程序模式为例,当外部输入请求程序模式命令时,会置位P_Mode指令中的Mode.PCmd_Acq,从而选择P_Mode指令中的程序模式。当外部输入要求释放程序模式时,置位P_Mode指令中释放命令位Mode.PCmd_Rel,切换为操作员模式。
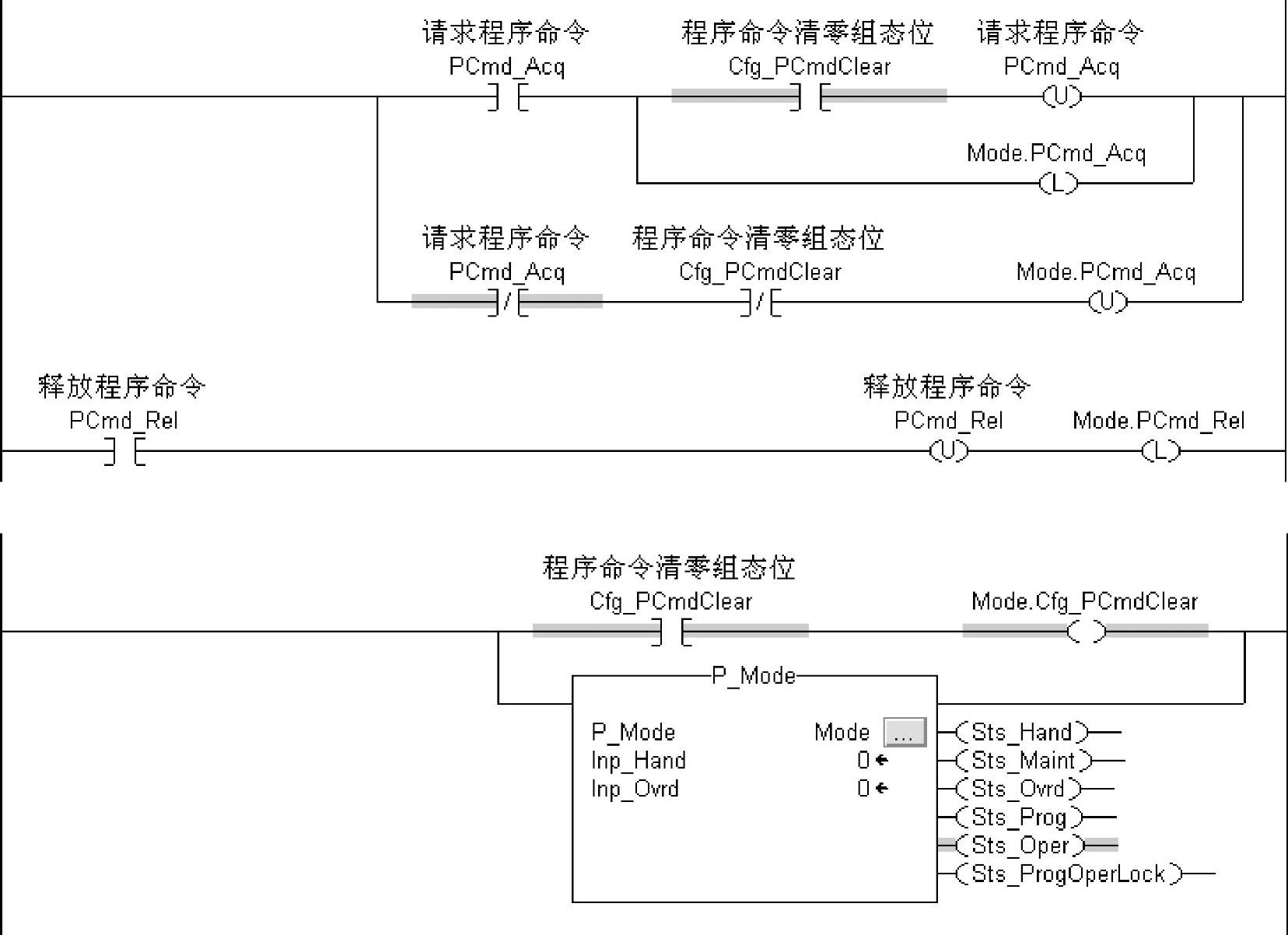
图3-75 模式选择程序
P_VSD指令可以通过变频器控制电动机起动、停止、点动、正转、反转、加速、减速和转速调节,用途非常广泛。图3-76所示为P_VSD实现反转的内部逻辑流程图。
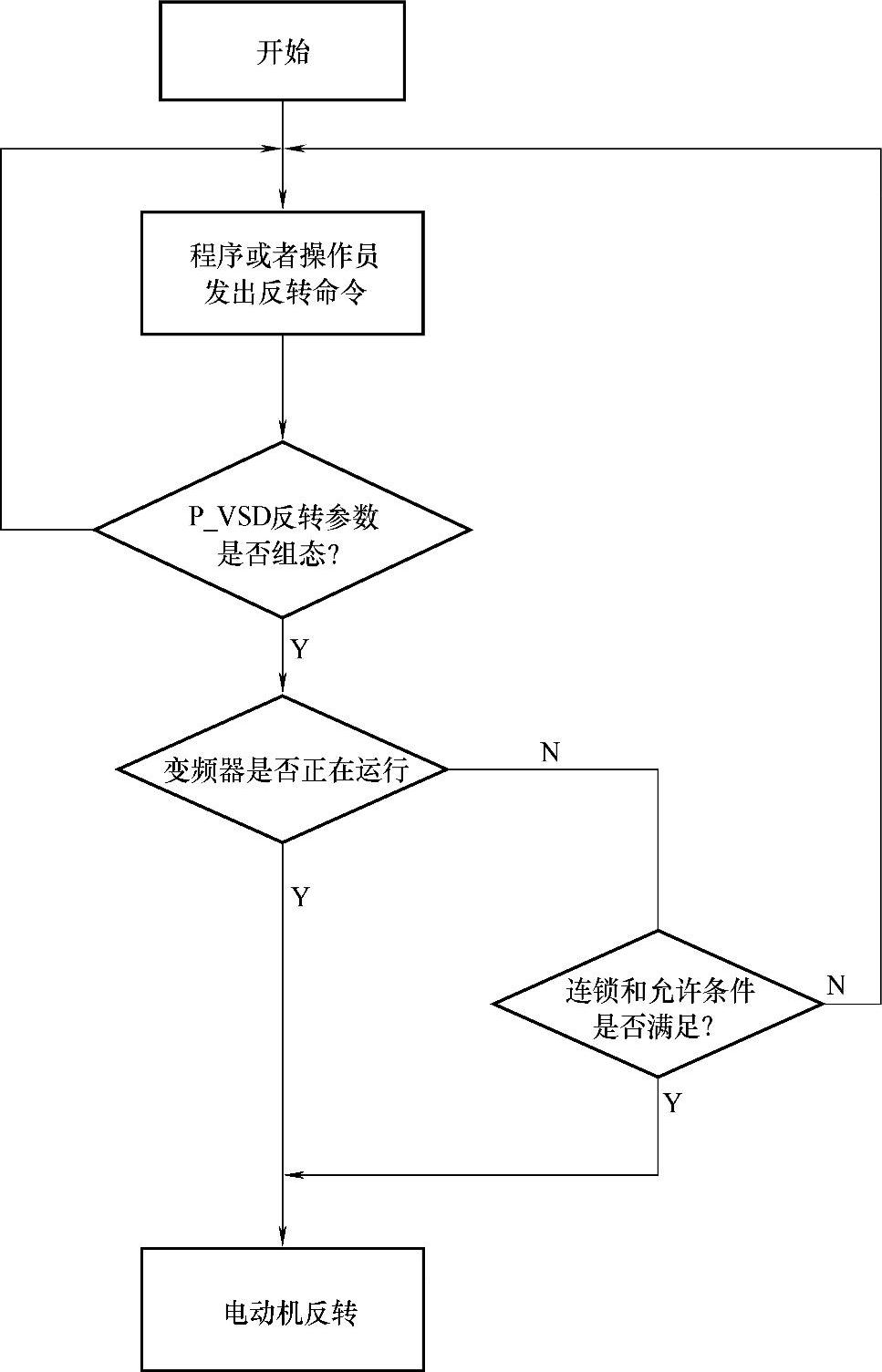
图3-76 反转的内部逻辑流程图
针对上述流程图,实现反转的程序如下,当程序或操作员发出反转命令,即PCmd_Rev和Ocmd_Rev等于1,P_VSD中反转组态参数Cfg_HasReverse=1,允许和联锁条件满足的情况下,置位反转中间变量,如图3-77所示。其它状态与反转相类似,不再一一赘述。
由反转的中间变量使得反转输出位为1,即Out_Fwd=1。实现电动机反转,如图3-78所示。
P_VSD指令可以通过设置变频器的运行频率来调节电动机的转速,首先由程序或者操作员设置频率PSet_OutDatalink和OSet_OutDatalink,判断该数值是否在组态的范围之内Cfg_OutDatalinkMax和Cfg_OutDatalinkMin,再经过整定输出频率值。需要注意的是P_VSD指令Cfg_HasOutDatalink组态参数必须为1。流程图如图3-79所示。
针对上述流程,编写的梯形图程序如图3-80所示,该图以程序模式为例,操作员模式控制与程序模式控制类似,在此不再赘述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





