杭州七格污水处理厂三期工程建设了三座A/A/O生物反应池,每座生物反应池分为两组,3×2组生物反应池的每组作为一个运行单体,由现场PLC分控站(LCS2)下挂一个远程I/O站,来负责该组生物反应池的设备控制和自动化运行控制。每组生物反应池按依次顺序由厌氧段、缺氧段、好氧段三个区域组成。每组生物池设置3个进水调节堰,3个电动闸板,16个潜水推流器,4个内回流泵和3个空气调节阀门。
1.进水调节堰的控制
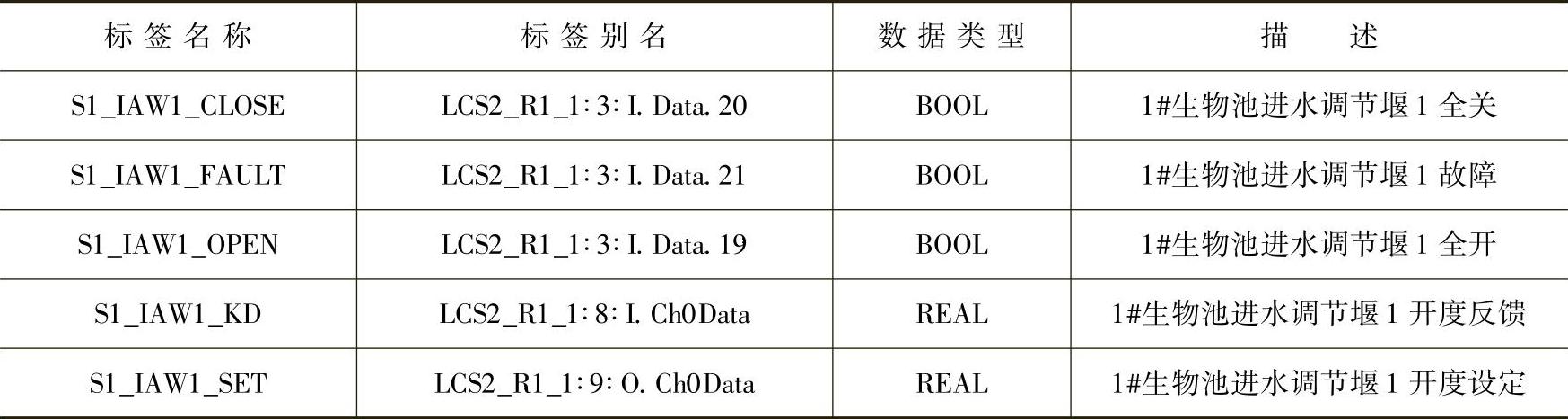
根据生物池的容积设定调节堰开度,PLC采集进水调节堰全开、全关、故障和开度反馈信号,见表3-5。
表3-5 进水调节堰信号表
2.电动渠道闸门
电动渠道闸门为“就地”控制,PLC仅采集其状态信号,不进行远程控制。
采集的状态信号如表3-6所示。
表3-6 电动闸板信号表

3.内回流泵和潜水推流器的控制
潜水推流器可以由“就地”控制,也可以“远程”控制。潜水推流器在正常情况下连续工作。潜水推流器数量较多,控制方式与内回流泵相同。
混合液内回流比的调节控制是整个系统控制的重要环节,通过设置最佳的内回流比有利于充分利用硝酸盐在反硝化过程中置换出的氧,这样可消耗进水污水中的碳源C,去除BOD,从而节省好氧段的曝气量,降低能耗。另外,最佳的内回流比还可消耗在硝化过程中产生的氢离子,产生大量的碱度,从而有利于生物反应池中硝化反应过程的进行;同时,还可防止二沉池硝酸盐浓度过高,反硝化后氮气逐出,从而影响沉降效果。
每一组生物反应池的混合液内回流量通过调节4台(3用1备)潜水轴流泵投入运行台数来控制。
控制思想:根据进水TN(总氮)的含量,调节内回流比,一般控制在100%~200%之间时脱氮效率最佳。利用缺氧段设置的氧化还原电位(ORP)在线检测仪表,通过监测ORP值来观察。发现缺氧段ORP值升高,说明内回流带入的DO太多,在缺氧段应控制ORP值在-100mV,在调试过程中总结最佳内回流比。
混合液内回流泵可由“就地”控制,也可以“远程单动”,频率设定由现场MCC柜内变频器手动设定。
内回流泵和潜水推流器控制模式流程图及创建的AOI指令可参考刮泥机的PUMP_CON-TROL(泵控制)AOI指令。
4.电动空气调节阀门的控制
电动空气调节阀可由“就地”调节,也可以通过“远程手动”或“远程自动”的方式调节。在自动调节状态下,根据对应廊道的溶解氧值并参考空气流量值进行调节,确保在满足空气量的前提下最节能。(https://www.daowen.com)
现场手动调节:将调节阀本体上的远程、就地选择开关选择在“就地”,通过本体上的增减按钮来调节阀门的开度;
远程手动调节:将调节阀本体上的远程、就地选择开关选择在“远程”,在上位调节阀操作画面上将“手动/自动”按钮置为“手动”状态,此时可以通过“开度手动设定”键来设定调节阀的开度,同时在“开度输出”框内显示开度的输出值,在“设备状态”表内显示阀门的实际开度反馈值,通过手动调节阀门开度来调节生物池好氧区的氧气含量DO值。
电动空气调节阀门数量较多,可编写VALVE_CONTROL(阀门控制)AOI指令。
输入输出参数如图3-64所示。
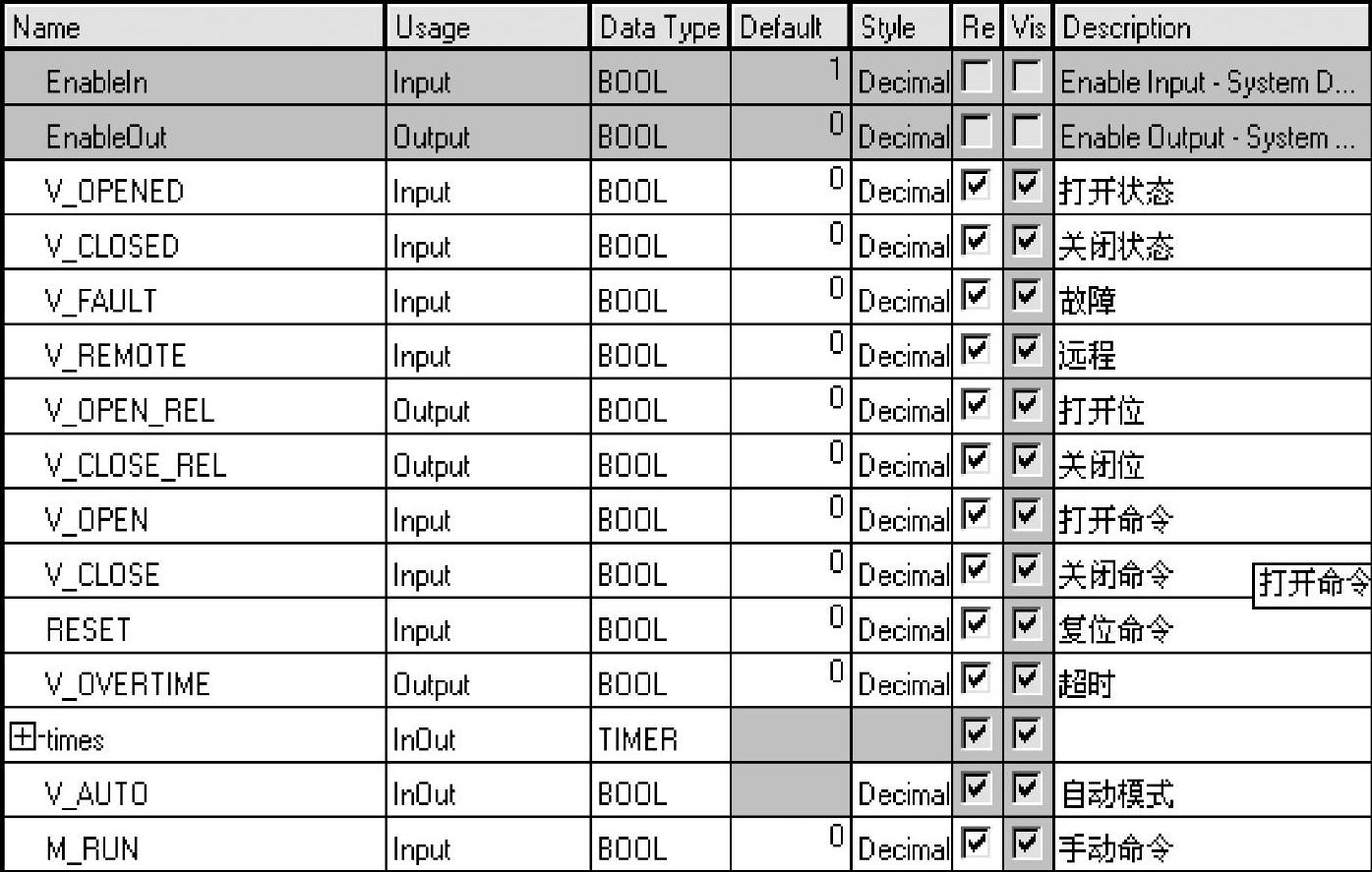
图3-64 VALVE_CONTROL输入输出参数
VALVE_CONTROL的内部逻辑流程图如图3-65所示。
在VALVE_CONTROL中嵌入P_Mode指令,进行手动模式和自动模式的选择。如图3-66所示。
在远程条件下,分别通过手动模式和自动模式使空气调节阀打开位置位。如图3-67所示。
在远程条件下,分别通过手动模式和自动模式使空气调节阀关闭位置位。如图3-68所示。
如果打开位(关闭位)置位超过一定时间,仍然没有打开(关闭)状态反馈,则触发超时位。如图3-69所示。
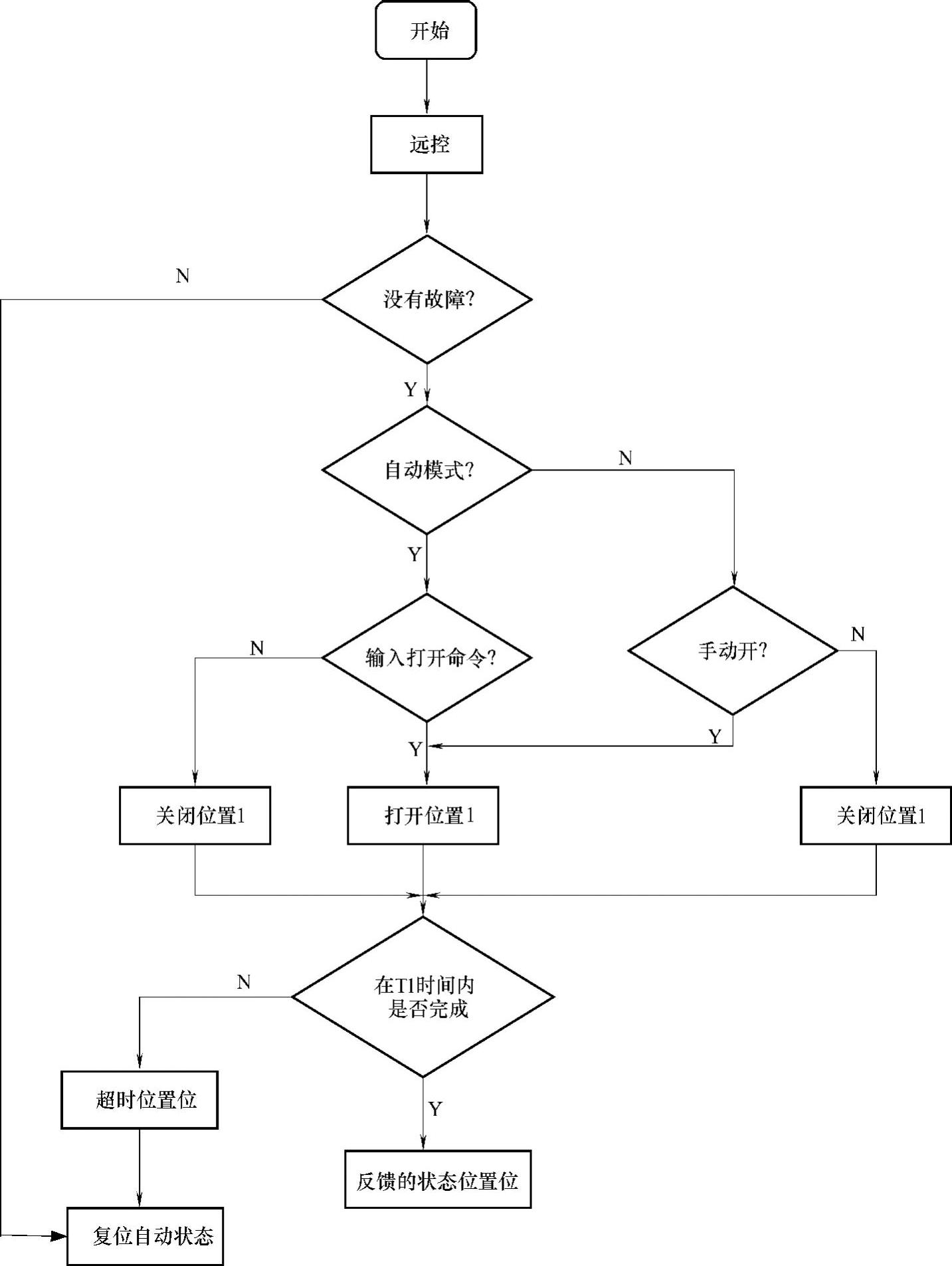
图3-65 VALVE_CONTROL的内部逻辑流程图
在非远程、超时和故障的条件下,复位自动模式位,只能通过手动模式控制空气调节阀门。如图3-70所示。
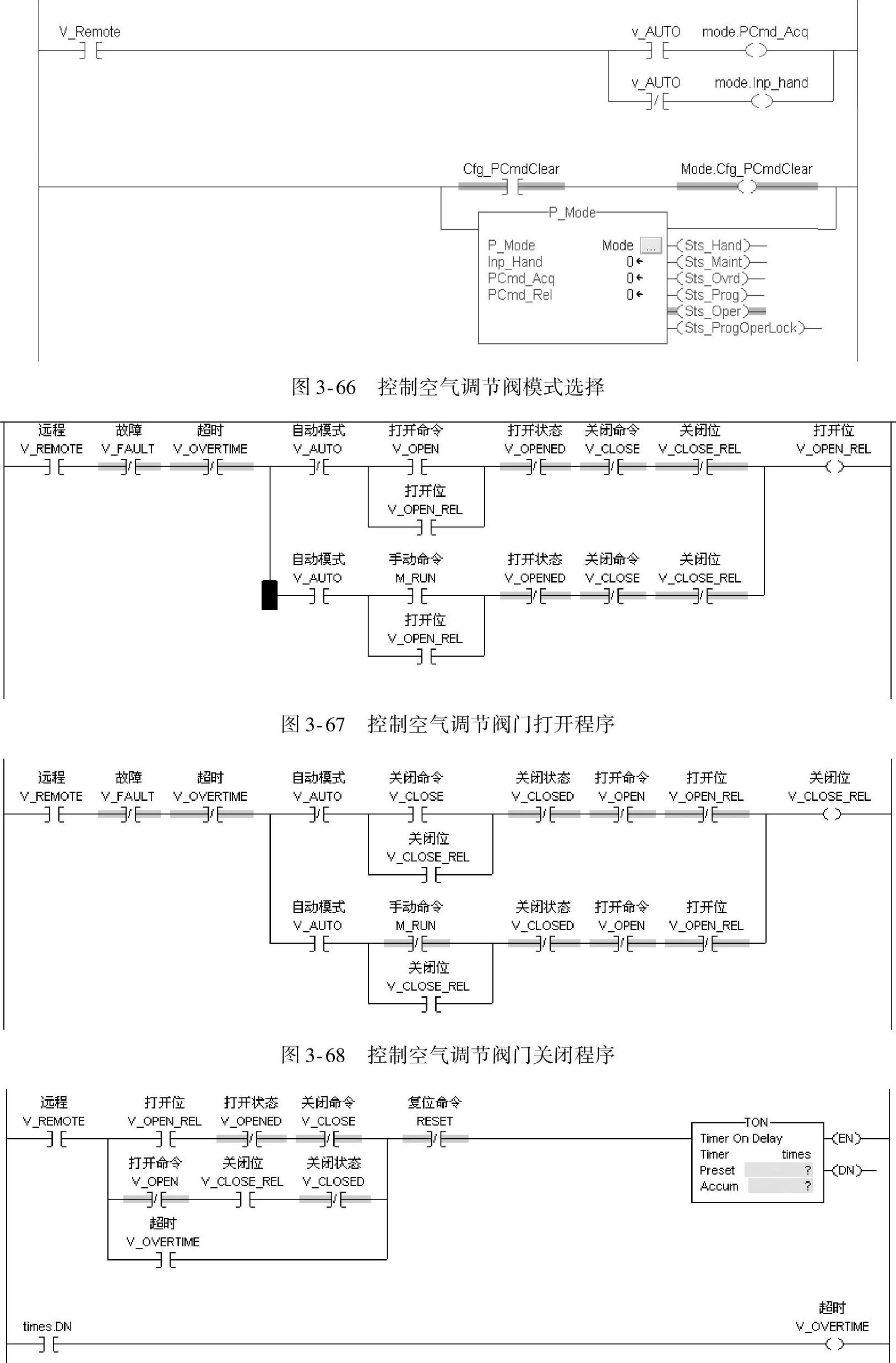
图3-69 超时程序
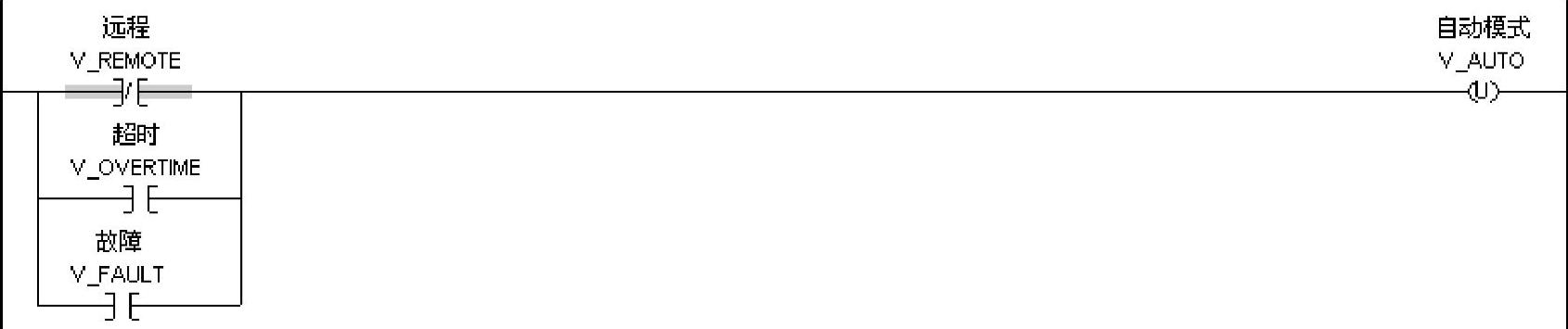
图3-70 复位自动模式程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






