四杆机构是机构设计最为基础的内容。曲柄滑块机构是四杆机构的变形,本例将对其进行运动学分析,也就是瞬态动力学分析。
下面分析的是一常见的曲柄滑块机构,曲柄长0.25m,滑行跨度0.62m,偏心距0.2m,初始角位移30°,角速度2rad/s,材料均为碳钢,不考虑摩擦,试对其进行瞬态动力学分析。
(1)启动Mechanical APDL Product Launcher 17.0,在弹出的17.0:ANSYS Mechanical AP-DLProduct Launcher窗口中分别设置Simulation Envivonment、Lisence、Working Directory,在Job Name框中输入项目名称9-3,然后单击Run按钮进入ANSYS17.0GUI界面。
(2)在GUI界面中选择Main Menu>Preprocessor>Element Type>Add/Edit/Delete命令,在弹出的对话框中单击Add按钮,在弹出的对话框中选择COMBIN7,定义为1号单元;选择BEAM188,定义为2号单元。
(3)在GUI界面中选择Main Menu>Preprocessor>Real Constants>Add/Edit/Delete命令,参照前面实例介绍的步骤定义1号实常数,KX=1E9、KY=1E3、KZ=1E3,单击OK按钮。
(4)在GUI界面中选择Main Menu>Preprocessor>Sections>Beam>Common Sections命令,在弹出的对话框中选择截面类型为RECT(即矩形),设置长(B)与高(H)为2E-2,单击OK按钮。
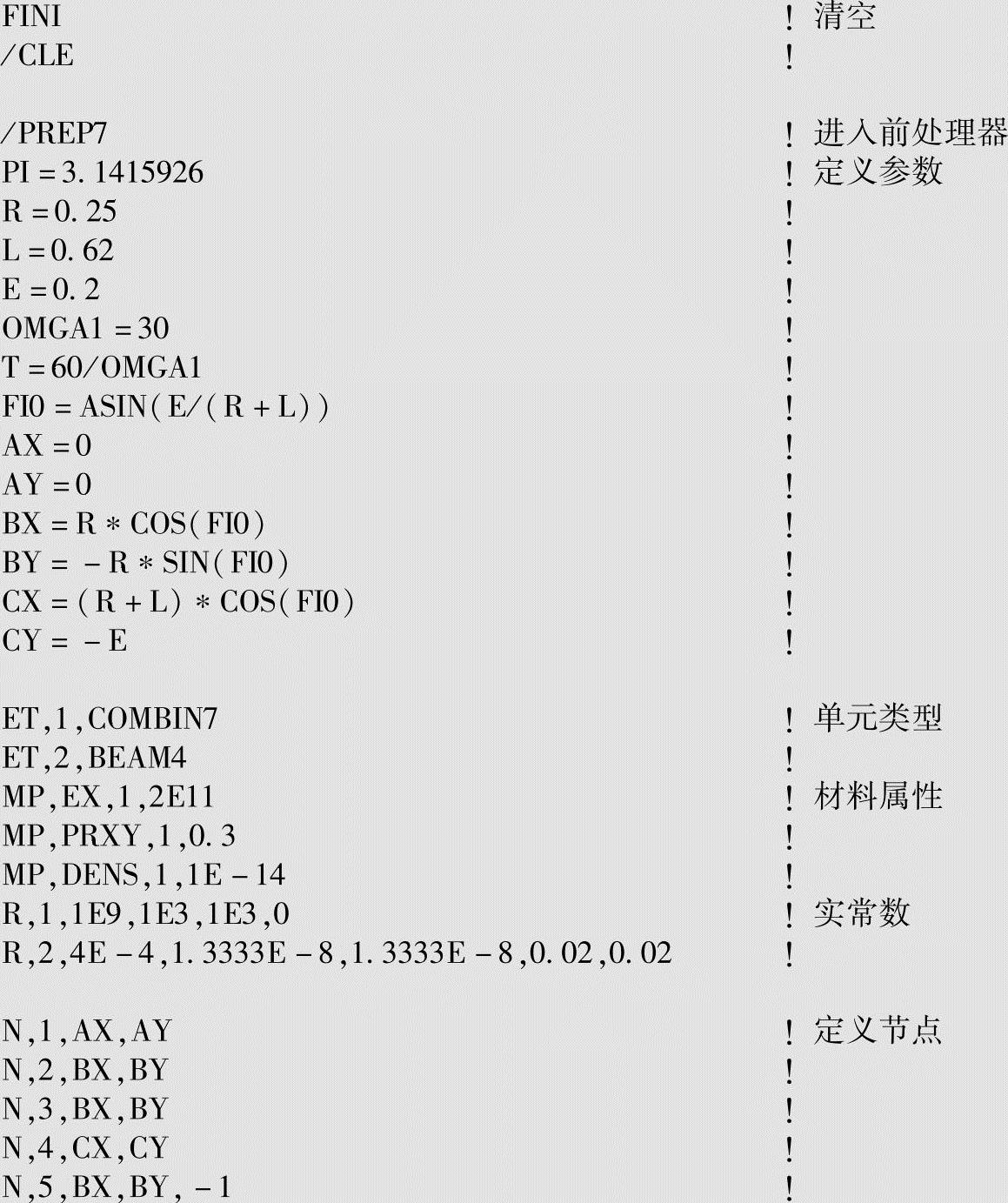
(5)在GUI界面中选择Utility Menu>Parameters>Scalar Parameters命令,弹出图9-120所示的Scalar Parameters对话框,输出如下参数,单击OK按钮。
PI=3.1415926
R=0.25
L=0.62
E=0.2
OMGA1=30
T=60/OMGA1
FI0=ASIN(E/(R+L))
AX=0
AY=0
BX=R∗COS(FI0)
BY=-R∗SIN(FI0)
CX=(R+L)∗COS(FI0)
CY=-E
(6)在GUI界面中选择Main Menu>Preprocessor>Material Props>Material Models命令,弹出图9-121所示的Define Material Behavior对话框,选择结构、线性、弹性、各向同性模型。
在弹出的图9-122所示Linear Isotropic Properties for Material Number1对话框中,输入弹性模量与泊松比,然后单击OK按钮。选择Density(密度属性),弹出图9-123所示的Den-sity for Material Number1对话框,设置材料密度为1E-014。
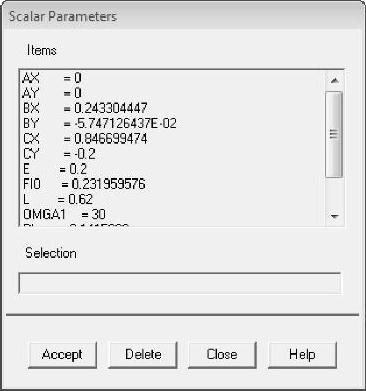
图9-120 Scalar Parameters对话框
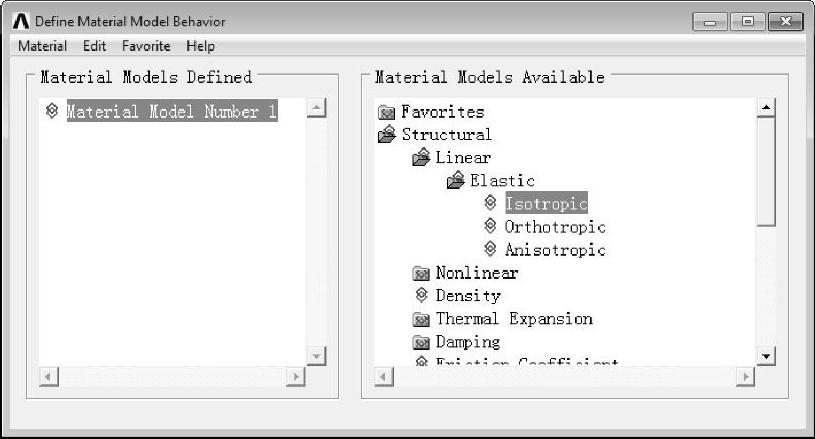
图9-121 Define Material Behavior对话框
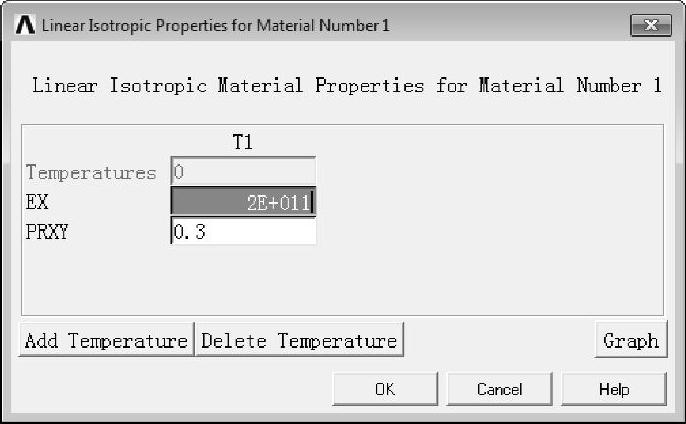
图9-122 Linear Isotropic Properties for Material Number1对话框
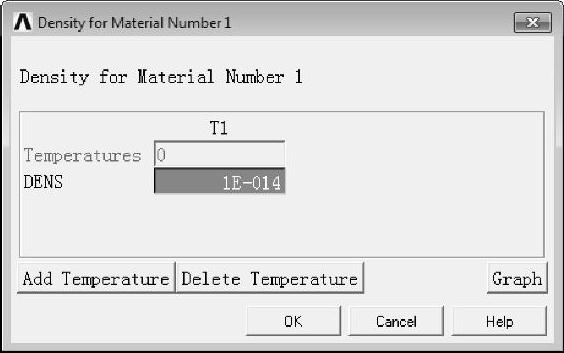
图9-123 Density for Material Number1对话框
至些完成准备工作,开始定义模型。
(7)在GUI界面中选择Main Menu>Preprocessor>Modeling>Create>Nodes>In Active CS命令,弹出图9-124所示的Create Nodesin Active Coordinate System对话框,输入节点编号与坐标,完成表9-3中所列出的节点定义。完成定义的节点如图9-125所示。
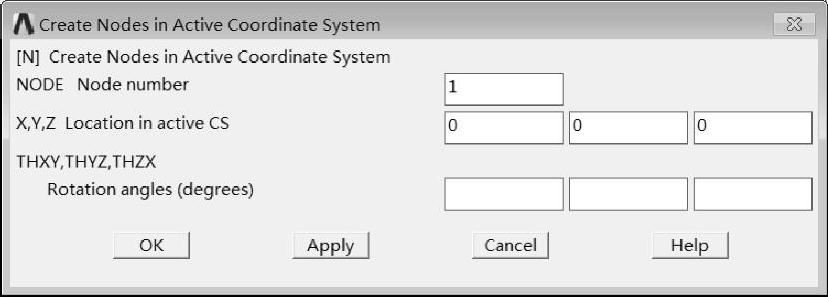
图9-124 Create Nodes in Active Coordinate System对话框
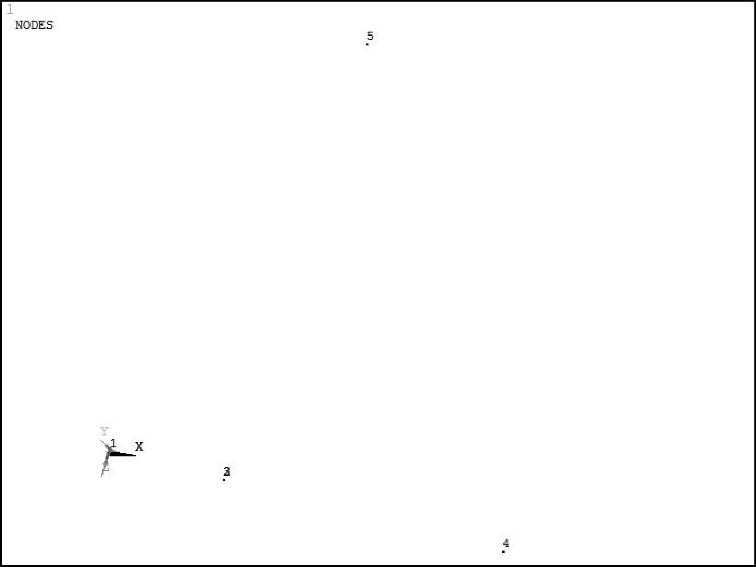
图9-125 定义节点
表9-3 节点列表

(8)在GUI界面中选择Main Menu>Preprocessor>Modeling>Create>Elements>Elem Attributes命令,弹出图9-126所示的Element Attributes对话框,选择单元编号为1,实常数编号为1,单击OK按钮。
在GUI界面中选择Main Menu>Preprocessor>Modeling>Create>Elements>Auto Num-bered>Thru Nodes命令,拾取3、5号关键点,单击OK按钮,完成单元定义,如图9-127所示。
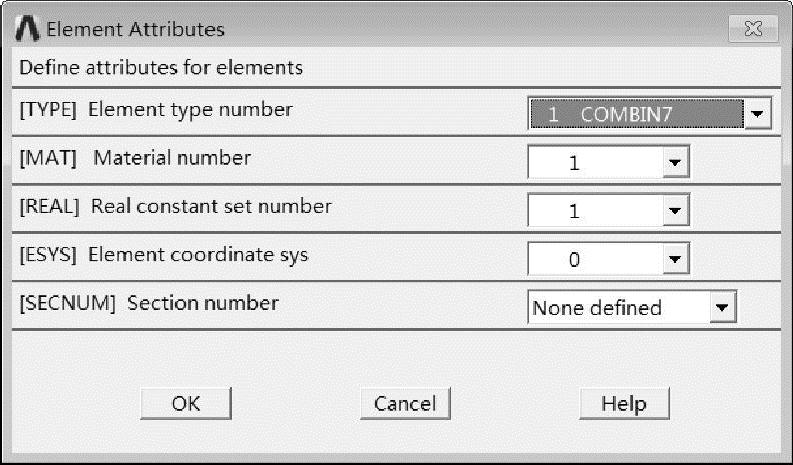
图9-126 Element Attributes对话框
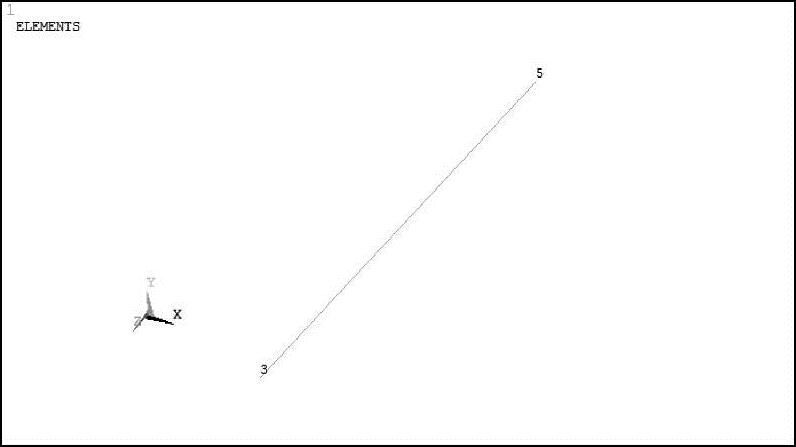
图9-127 生成单元
在GUI界面中选择Main Menu>Preprocessor>Modeling>Create>Elements>Elem Attributes命令,弹出图9-128所示的Element Attributes对话框,选择单元编号为2,实常数编号为2,单击OK按钮。
在GUI界面中选择Main Menu>Preprocessor>Modeling>Create>Elements>Auto Num-bered>Thru Nodes命令,拾取1、2号关键点,单击Apply按钮;再拾取3、4号关键点,单击OK按钮,完成单元定义,如图9-129所示。
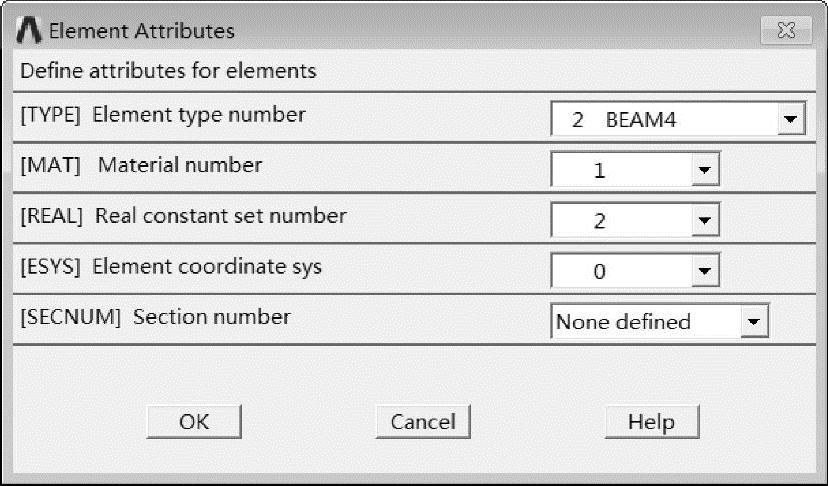
图9-128 Element Attributes对话框
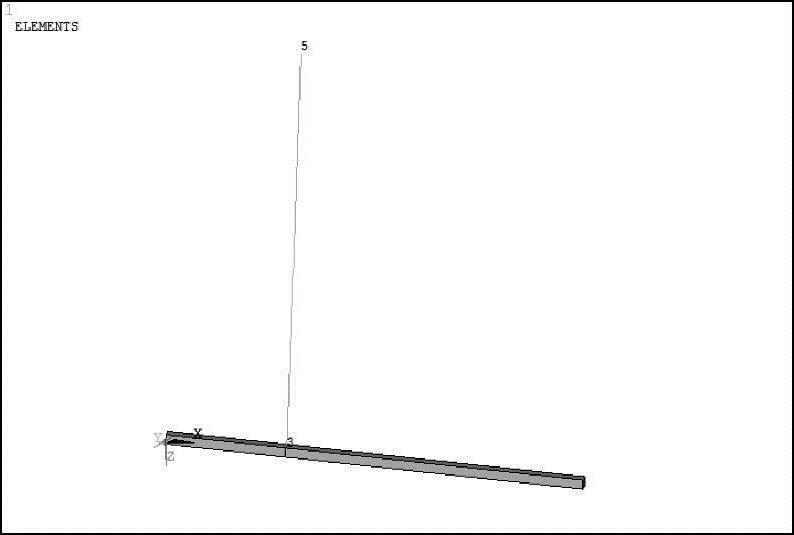
图9-129 生成单元
(9)在GUI界面中选择Main Menu>Solution>Analysis Type>New Analysis命令,弹出图9-130所示的New Analysis对话框,选择分析类型为Transient。
在GUI界面中选择Main Menu>Solution>Analysis Type>Sol′n Controls>Basic命令,在弹出的Solution Controls对话框中按图9-131所示进行设置,单击OK按钮。
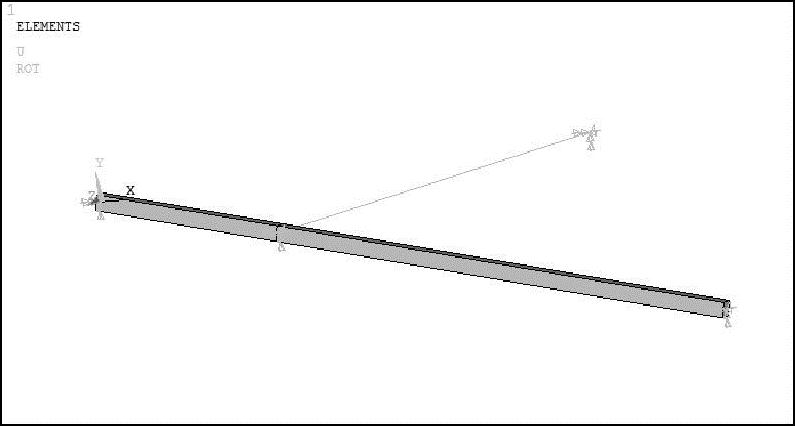
(10)在GUI界面中选择Main Menu>Solution>Define Loads>Apply>Structural>Dis-placement>On Nodes命令,在弹出的对话框中单击PickAll按钮,弹出图9-132所示的Apply U,ROT on Nodes对话框,选择约束UZ,单击OK按钮,完成约束后如图9-133所示。
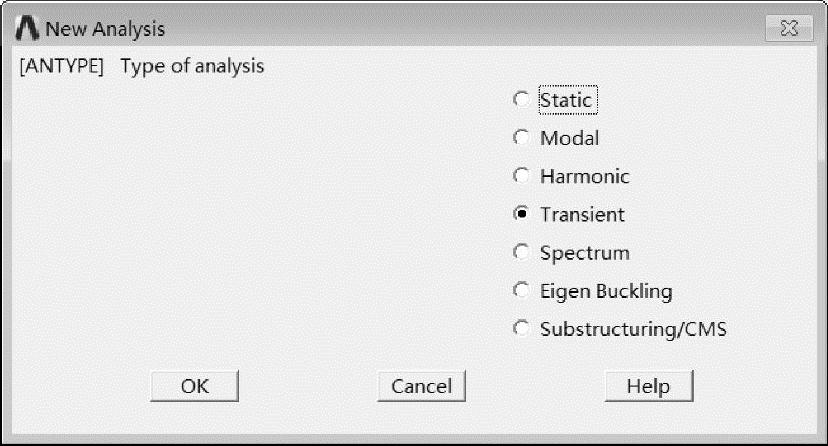
图9-130 New Analysis对话框
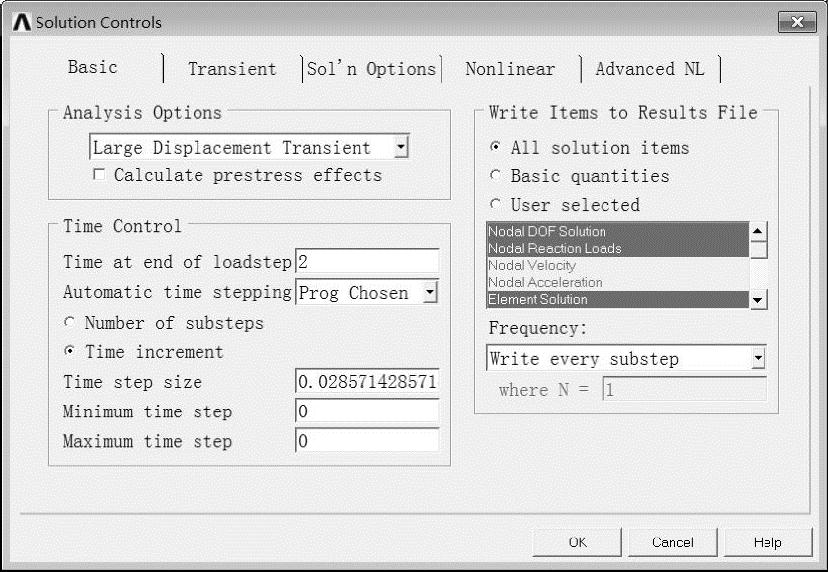
图9-131 Solution Controls对话框
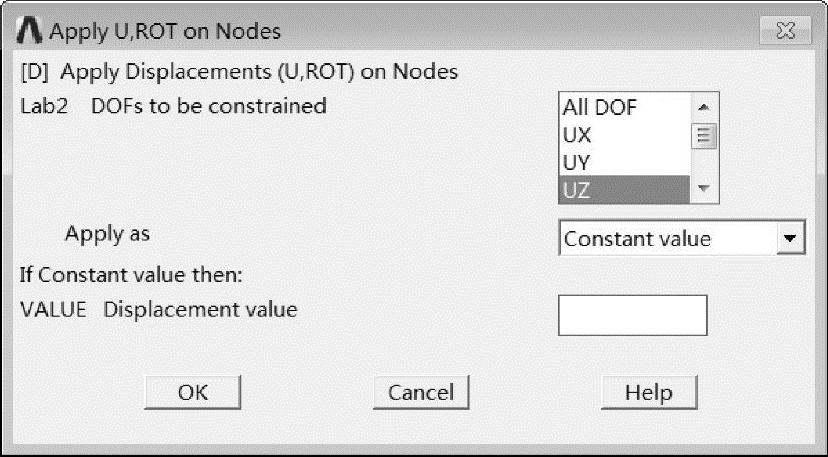
图9-132 Apply U,ROT on Nodes对话框(1)
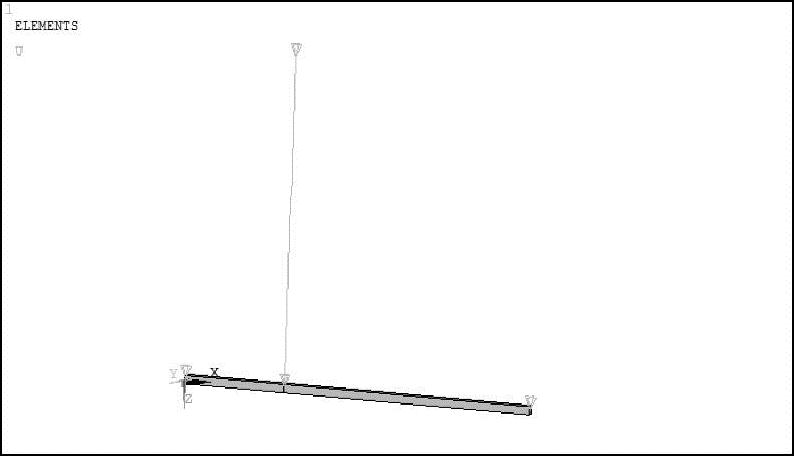
图9-133 约束Z方向
(11)重复上述操作,约束全部节点的X、Y方向的转动自由度,如图9-134所示。
(12)在GUI界面中选择Main Menu>Solution>Define Loads>Apply>Structural>Dis-placement>On Nodes命令,弹出Apply U,ROT on Nodes对话框。拾取1号节点,单击OK按钮,弹出如图9-135所示的Apply U,ROT on Nodes对话框,选择自由度为ROTZ,设置位移量为2∗PI,单击Apply按钮;再选择UX、UY,设置位移量为0,单击OK完成。
 (www.daowen.com)
(www.daowen.com)
图9-134 约束
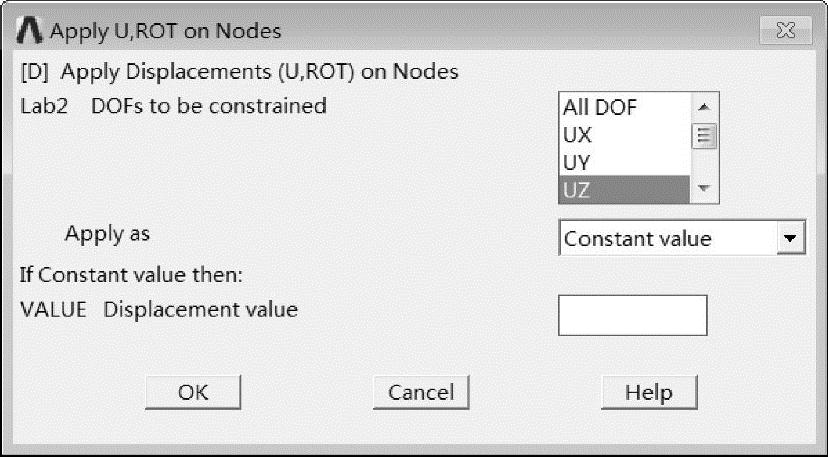
图9-135 Apply U,ROT on Nodes对话框(2)
在GUI界面中选择Main Menu>Solution>Define Loads>Apply>Structural>Displacement>On Nodes命令,拾取4号节点,约束UY。
完成约束的模型如图9-136所示。
(13)在GUI界面中选择Main Menu>Solution>Solve>Current LS命令,在弹出的如图9-137所示/STATUS Command窗口中显示了项目的求解信息及输出选项。
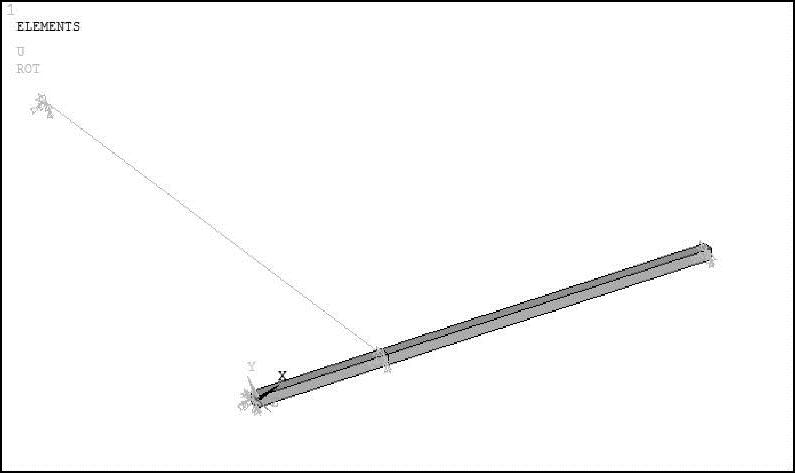
图9-136 完整约束
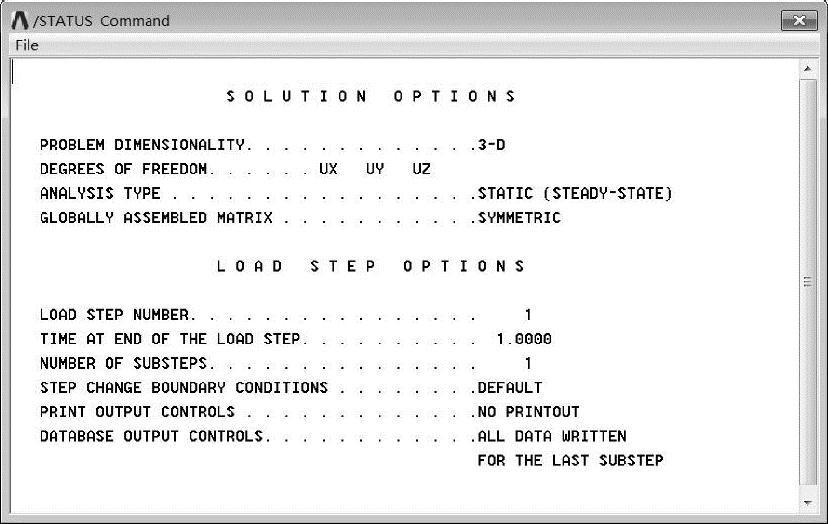
图9-137 /STATUS Command窗口
同时弹出的还有图9-138所示的Solve Cur-rent Load Step对话框,询问用户是否开始进行求解。
单击OK按钮开始求解,当弹出Solution is done!提示时,表明求解完成。
本例也可以使用命令流完成操作。
图9-138 Solve Current Load Step对话框
(14)完成求解后,即可进行后处理。运行如下后处理命令,绘制曲线。
/POST26 !进入时间历程后处理器进行分析
NSOL,2,4,U,X !所取位移节点解
DERIV,3,2,1 !求导数
DERIV,4,3,1 !求导数
PLVAR,2 !绘制曲线
PLVAR,3 !
PLVAR,4 !
FINISH !
图9-139所示为4号节点的位移曲线,图9-140所示为4号节点速度曲线,如图9-141所示为4号节点加速度曲线。
(15)在GUI界面中选择Main Menu>Gener-al Postproc>Plot Results>Contour Plot>Nodal Solu命令,弹出图9-142所示的Contour Nodal Solution Data对话框。
选择Displacement vector sum(位移矢量和),单击OK按钮,显示初始位移云图,如图9-143所示。
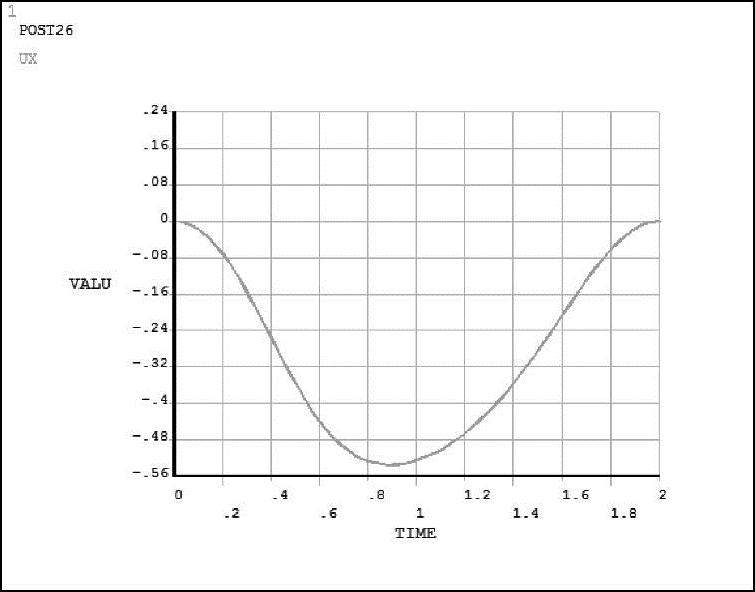
图9-139 4号节点位移曲线
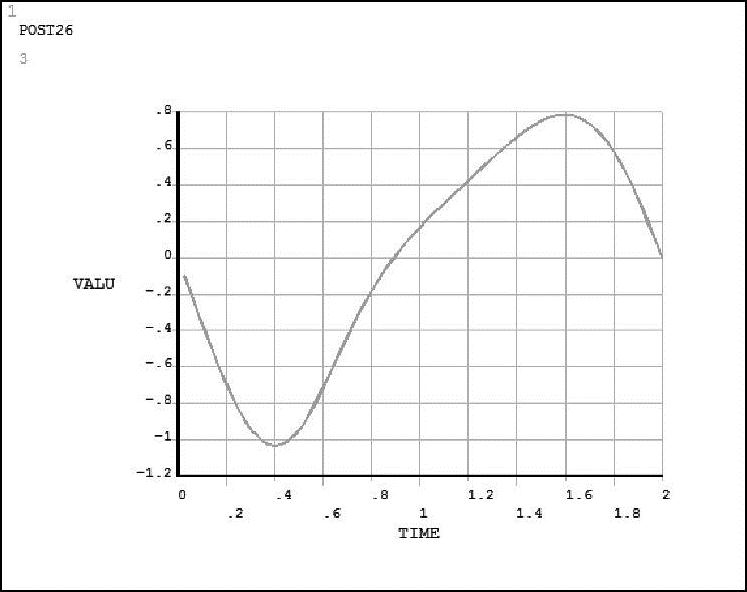
图9-140 4号节点速度曲线
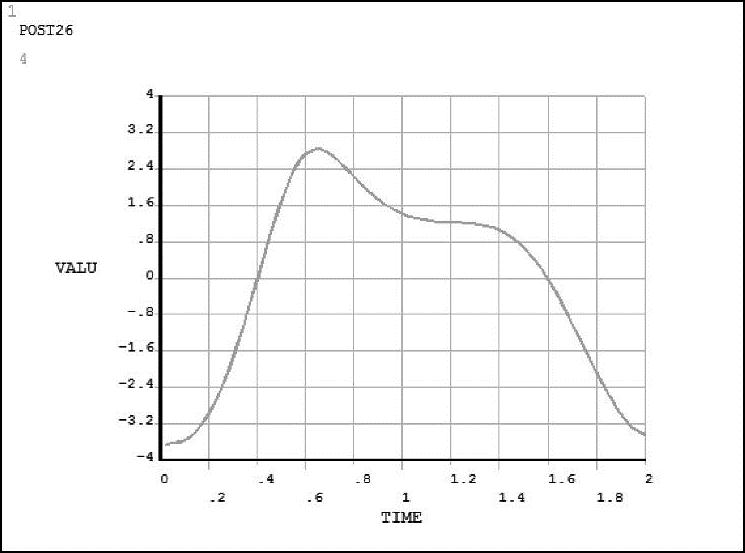
图9-141 4号节点加速度曲线
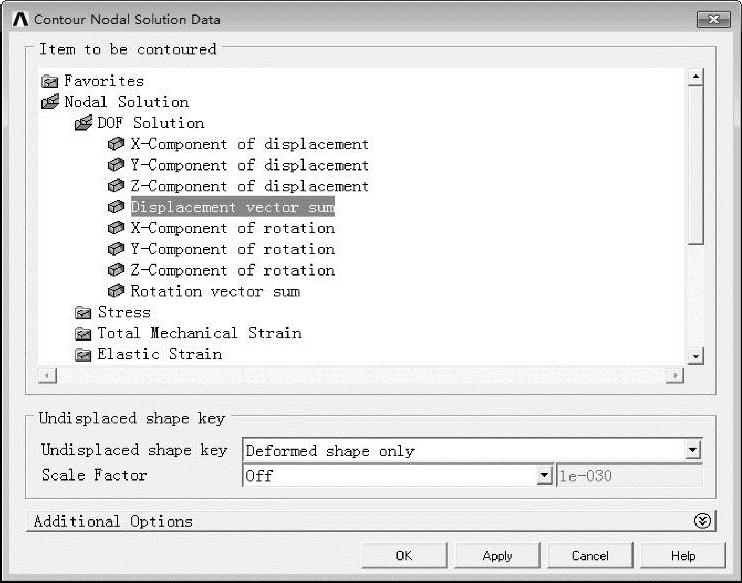
图9-142 Contour Nodal Solution Data对话框
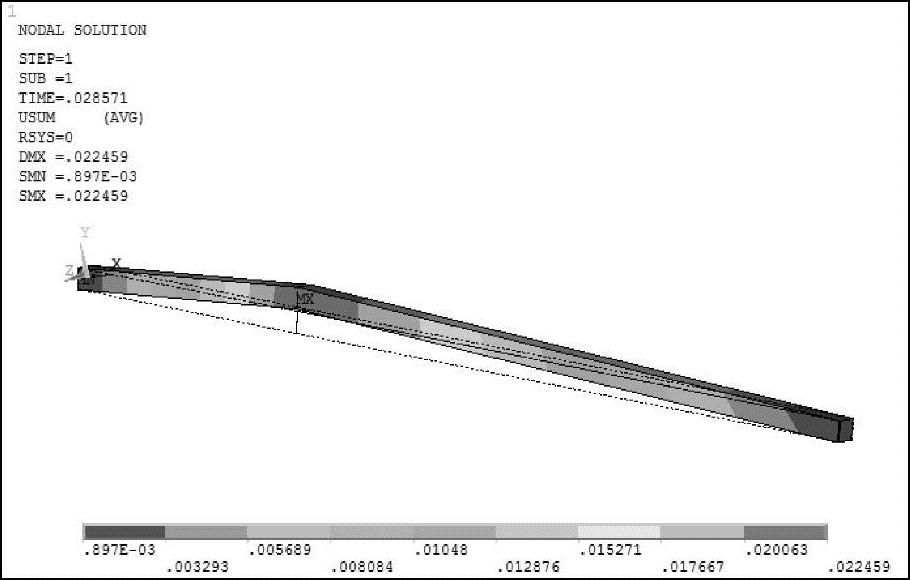
图9-143 初始位移云图
在GUI界面中选择Main Menu>General Postproc>Read Results>Next Set命令,依次读取其后4阶结果,显示各时期位移云图,如图9-144~图9-147所示。
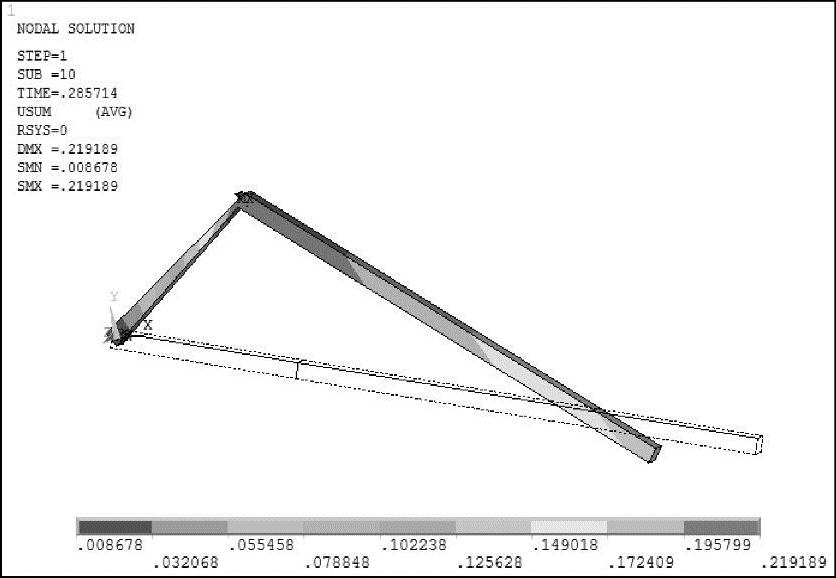
图9-144 第10子步位移云图
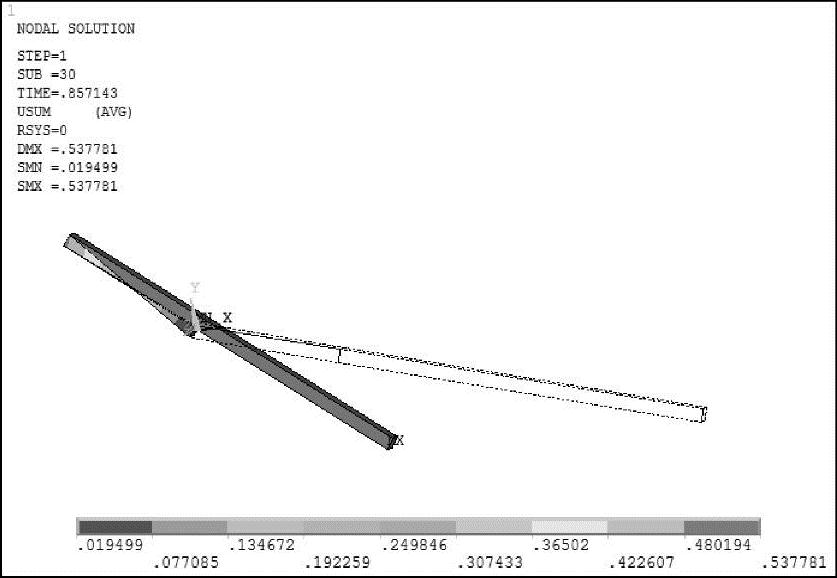
图9-145 第30子步位移云图
(16)在GUI界面中选择Main Menu>General Postproc>Read Results>First Set命令,读入第1阶的结果。在GUI界面中选择Main Menu>General Postproc>Plot Results>Contour Plot>Nodal Solu命令,弹出图9-148所示的Contour Nodal Solution Data对话框。选择第1主应力,单击OK按钮,显示初始应力云图,如图9-149所示。
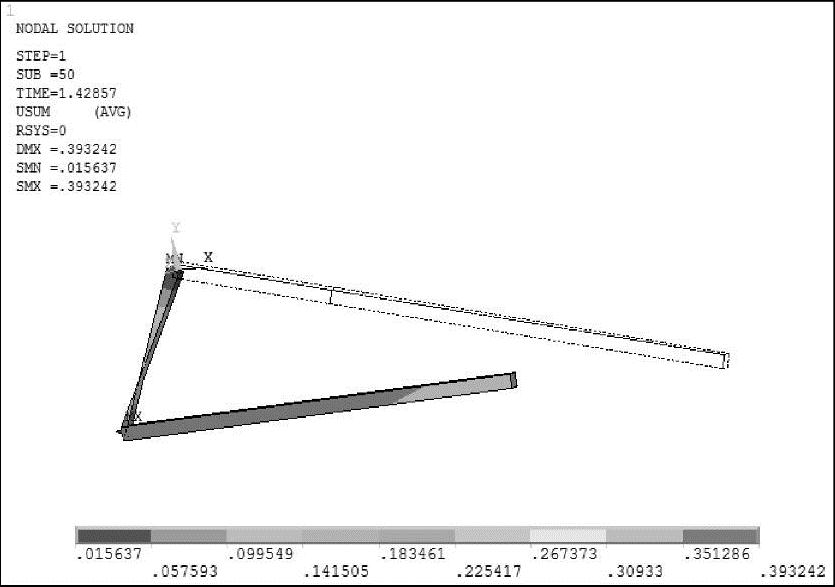
图9-146 第50子步位移云图
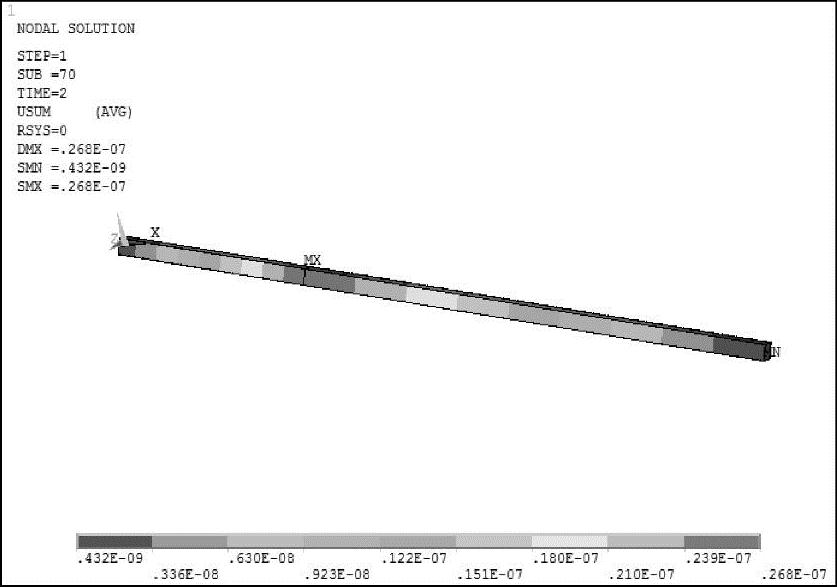
图9-147 第70子步位移云图
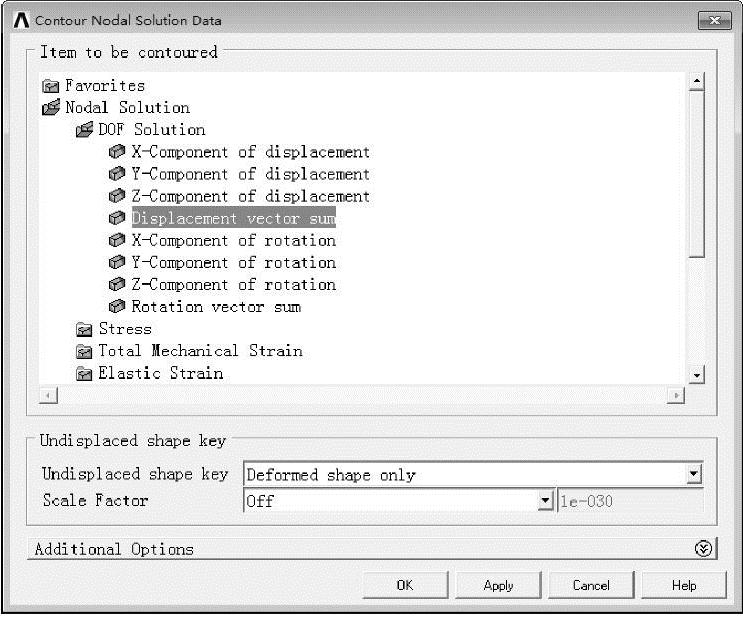
图9-148 Contour Nodal Solution Data对话框
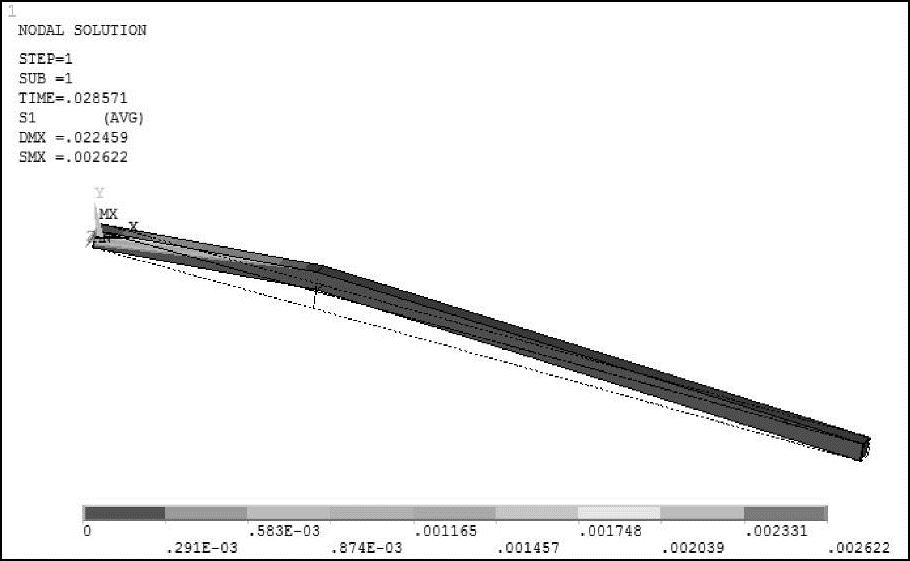
图9-149 初始应力云图
在GUI界面中选择Main Menu>General Postproc>Read Results>Next Set命令,依次读取其后各阶结果,显示各时期应力云图,如图9-150~图9-153所示。
单击工具栏中的Quit按钮,弹出Exit对话框。选中Save Everything(保存所有项目)单选按钮,单击OK按钮,退出ANSYS。
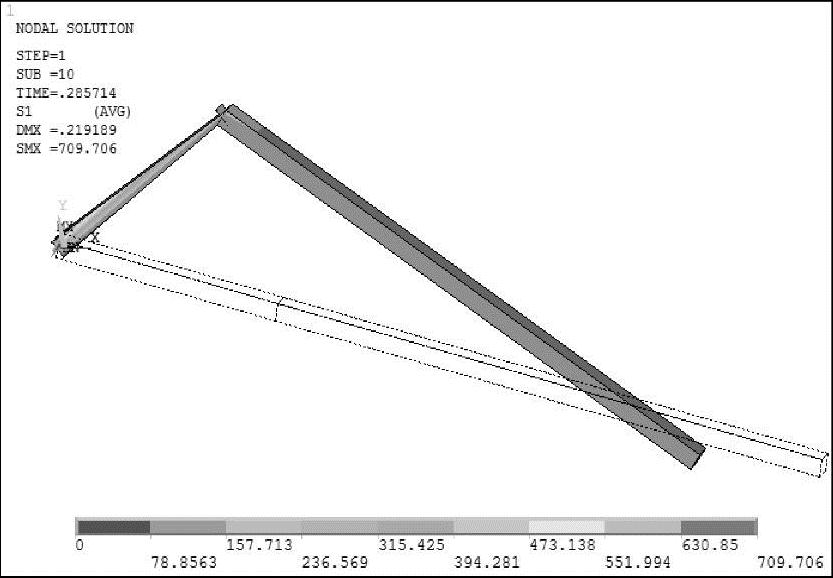
图9-150 第10子步应力云图
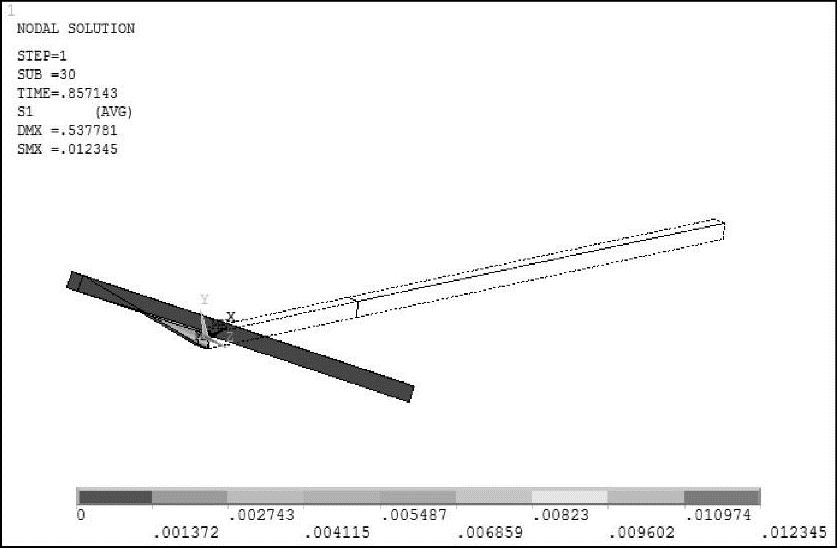
图9-151 第30子步应力云图
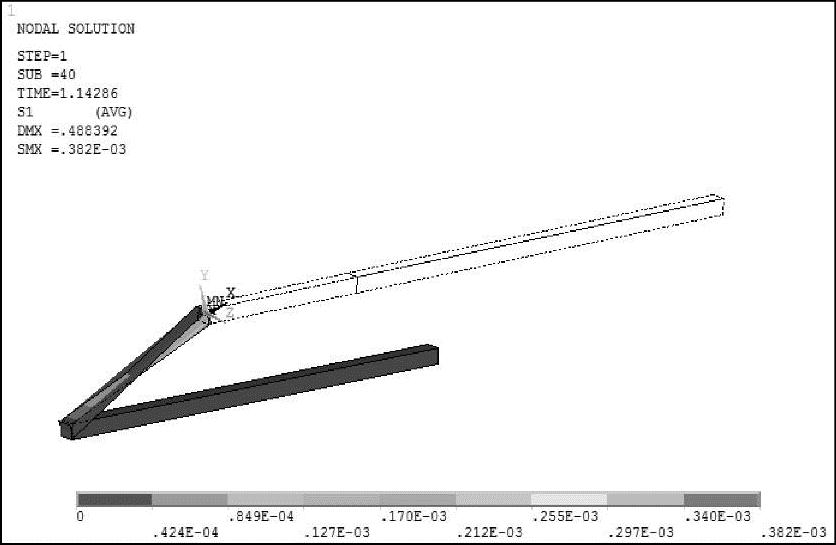
图9-152 第40子步应力云图
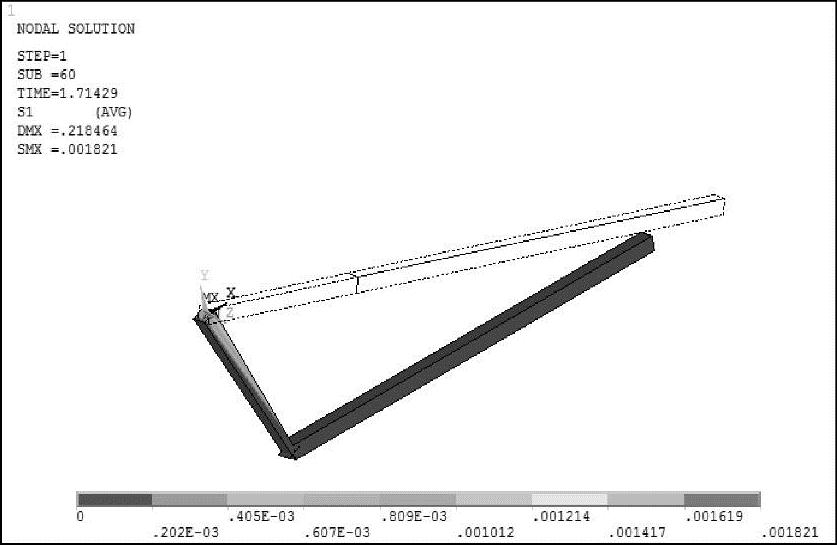
图9-153 第60子步应力云图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






