例17-1 如图17-13所示,在螺旋压榨机的手柄AB上作用一在水平面内的力偶(F,F′),其力偶矩等于M=2Fl,螺杆的螺距为h,求机构平衡时加在被压榨物体上的力。
已知:M=2Fl,h。
求:FN。
解:●建模
手柄、螺杆和压板组成的平衡系统受主动力:(F,F′),FN。
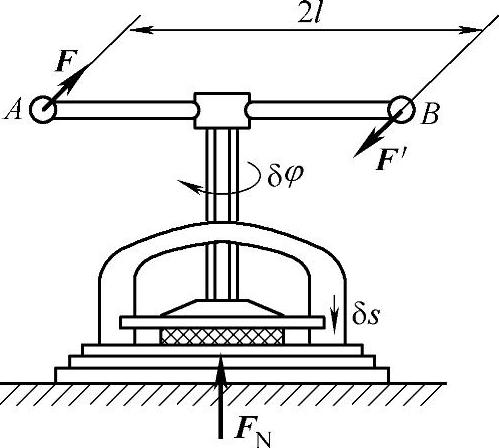
图17-13 例17-1图
用虚位移原理求解。
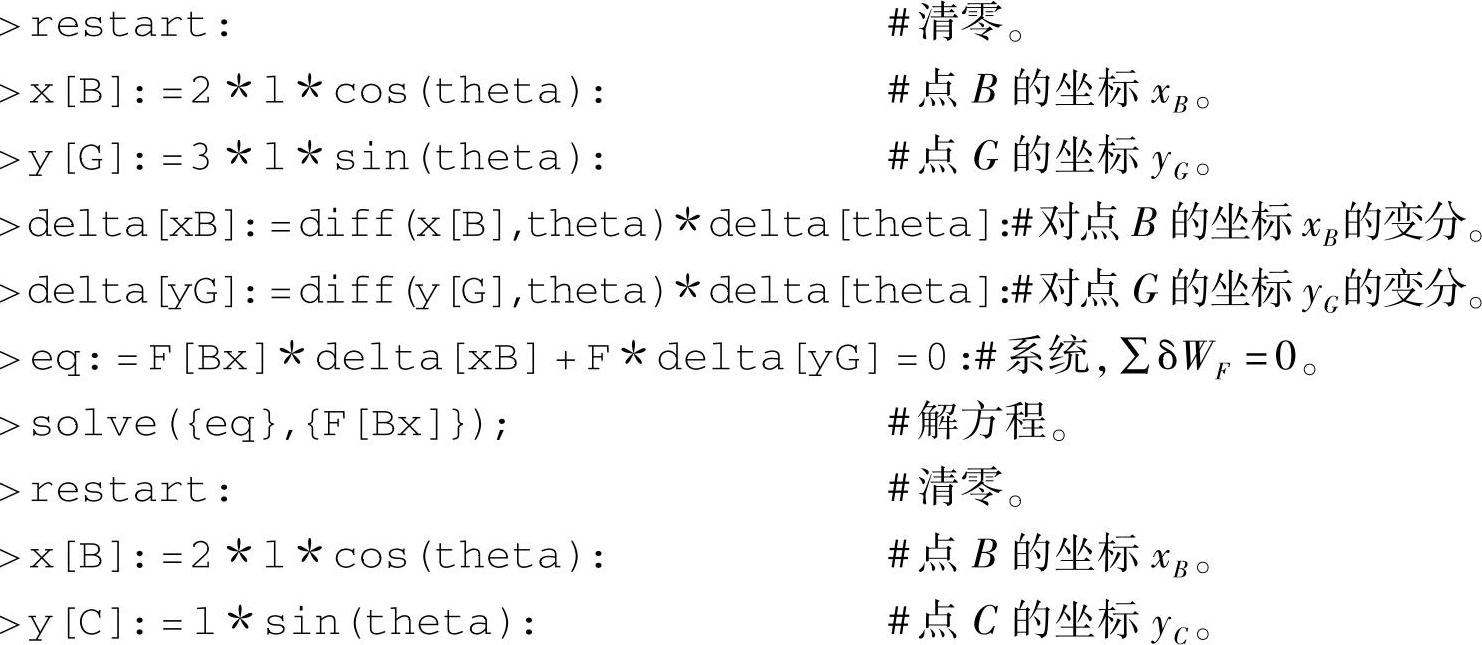
●Maple程序

答:机构平衡时加在被压榨物体上的力大小为 。
。
例17-2 图17-14a所示结构中,各杆自重不计,在G点作用一铅垂向上的力F,AC=CE=CD=CB=DG=GE=l。如果在G,C两点之间连接一根弹簧,弹簧刚度系数为k,如图17-14b所示,且在图示瞬时,弹簧已有伸长量δ0。在有、无弹簧两种情况下,求支座B的水平约束力。
已知:F,θ,k,δ0。
求:(1)k=0时,FBx;(2)k≠0时,FBx。
解:●建模
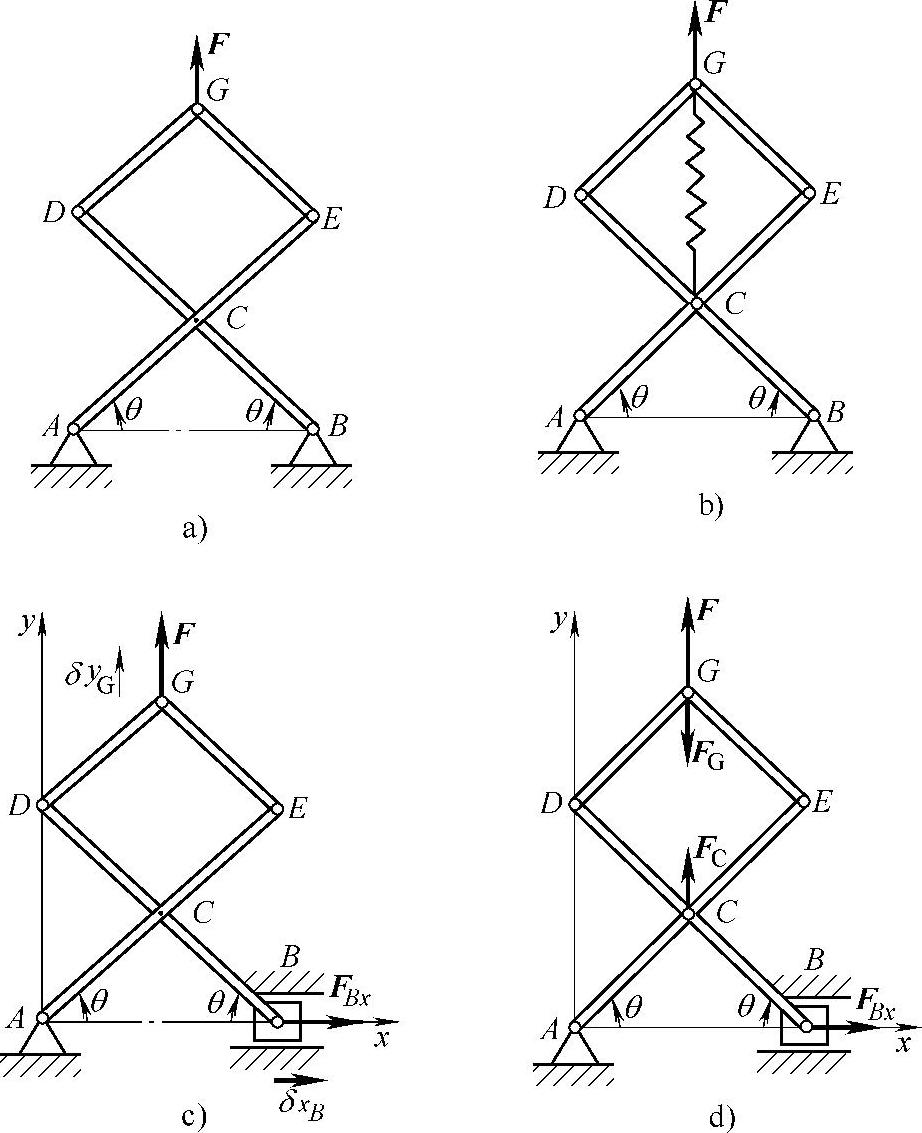
图17-14 例17-2图
把B处水平约束解除,以力FBx代替,把此力当做主动力,则结构变成图17-14c所示的机构。用虚位移原理求解。
(1)机构平衡系统受主动力:F,FBx。
(2)机构平衡系统受主动力:F,FBx,FC,FG(图17-14d)。
●Maple程序

答:(1)k=0时,支座B的水平约束力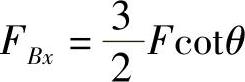 ;(2)k≠0时,支座B的水平约束力
;(2)k≠0时,支座B的水平约束力 θ。
θ。
例17-3 图17-15所示椭圆规机构中,连杆AB长为l,滑块A,B与杆重均不计,忽略各处摩擦,机构在图示位置平衡时,主动力FA和FB之间的关系。
已知:FB,φ,l。
求:FA。
解法一:●建模
用虚位移原理求解。椭圆规机构平衡系统受主动力:FA,FB。
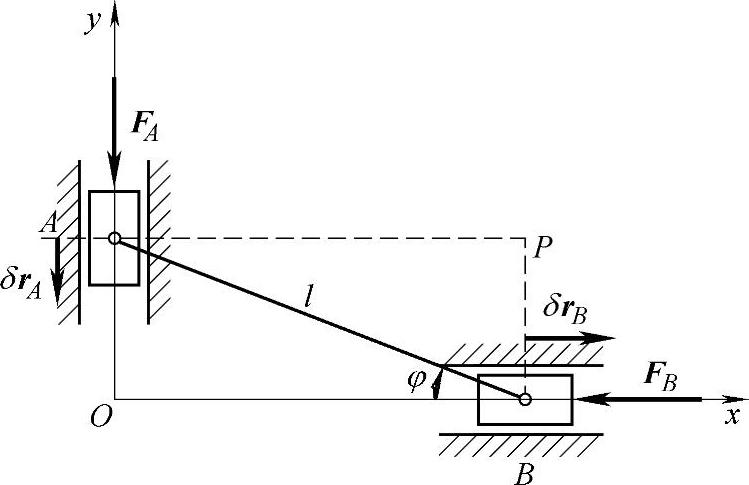
图17-15 例17-3图
●Maple程序
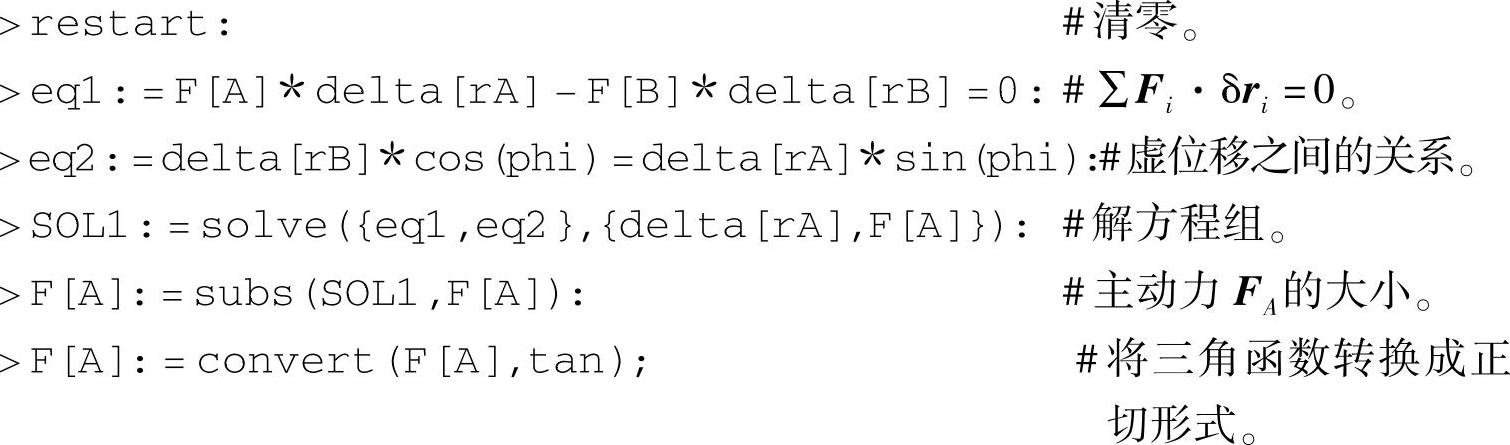
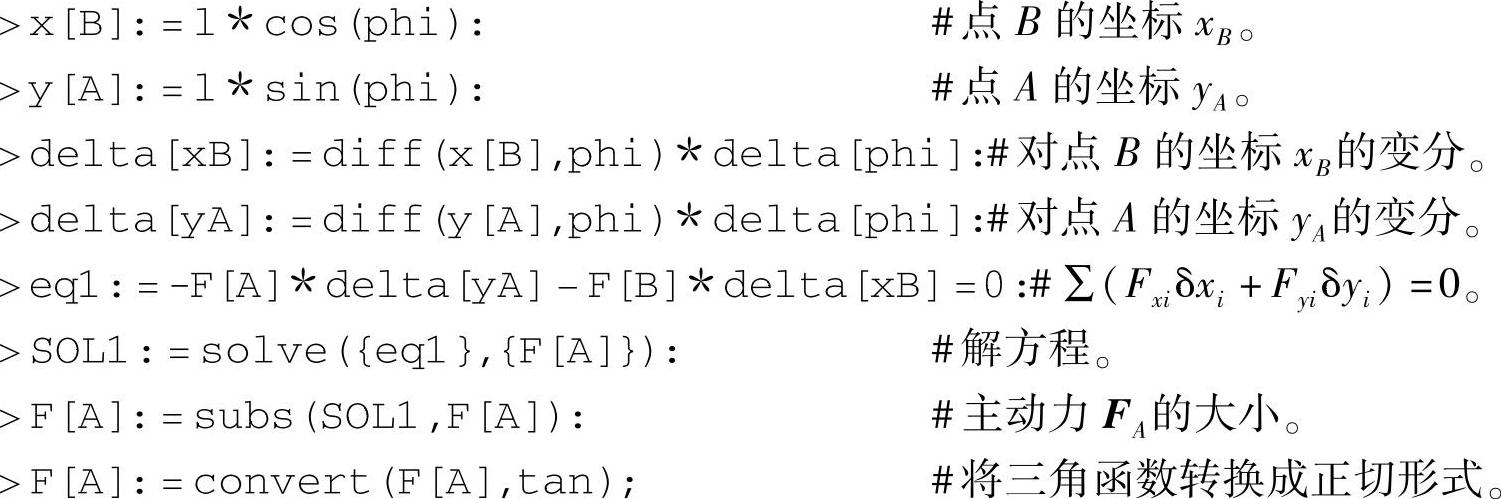
解法二:●建模
用解析法求解。椭圆规机构平衡系统受主动力:FA,FB。
●Maple程序
 (https://www.daowen.com)
(https://www.daowen.com)
解法三:●建模
用虚速度法求解。椭圆规机构平衡系统受主动力:FA,FB。
●Maple程序
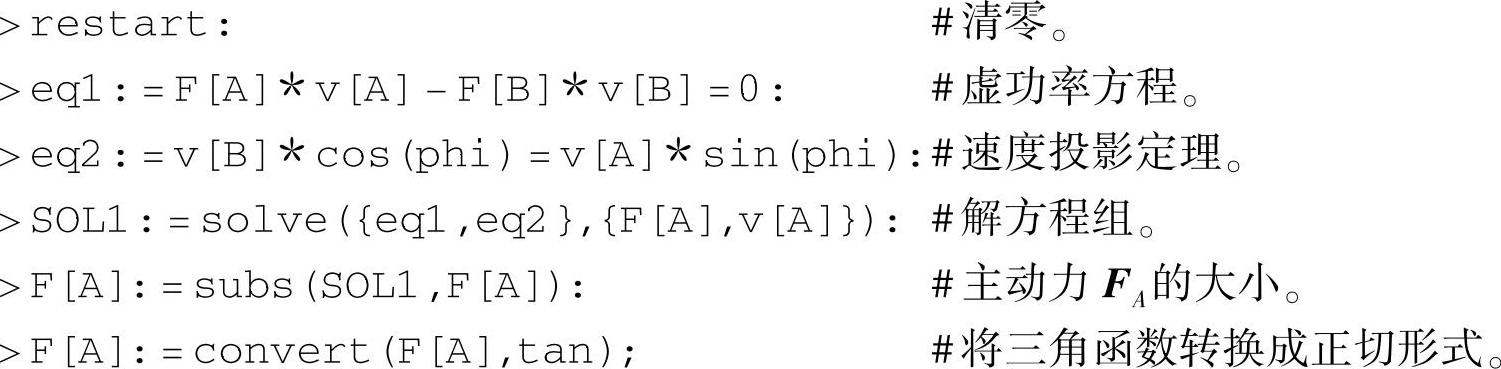
答:主动力FA和FB之间的关系FA=FBtanφ。
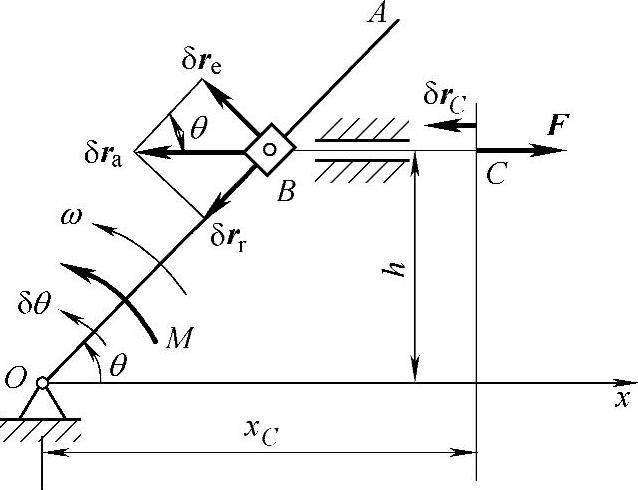
图17-16 例17-4图
例17-4 如图17-16所示机构,不计各构件自重与各处摩擦,求机构在图示位置平衡时,主动力偶矩M与主动力F之间的关系。
已知:F,h,θ。
求:M。
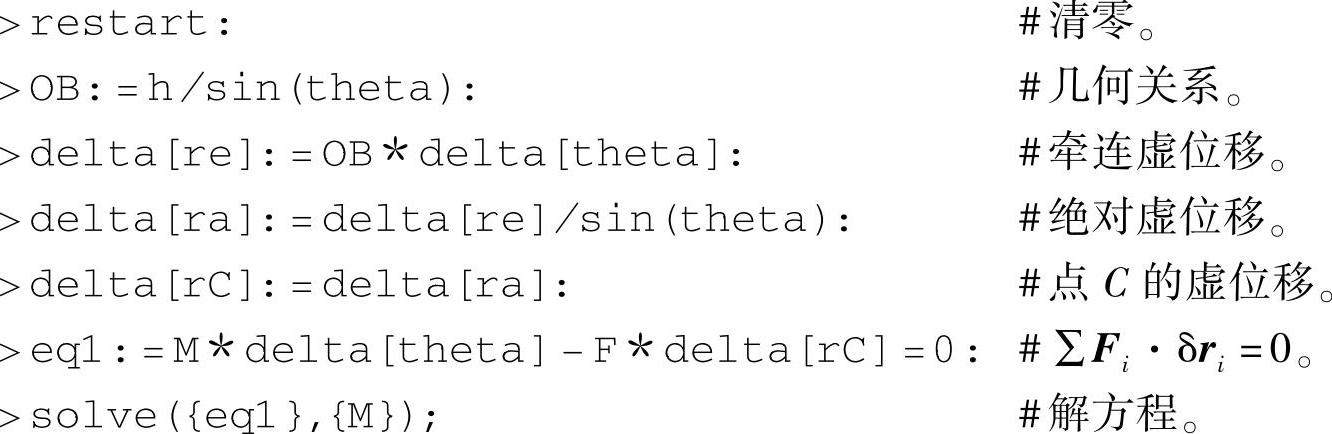
解法一:●建模
用虚位移原理求解。平衡系统受主动力:F,M。
●Maple程序
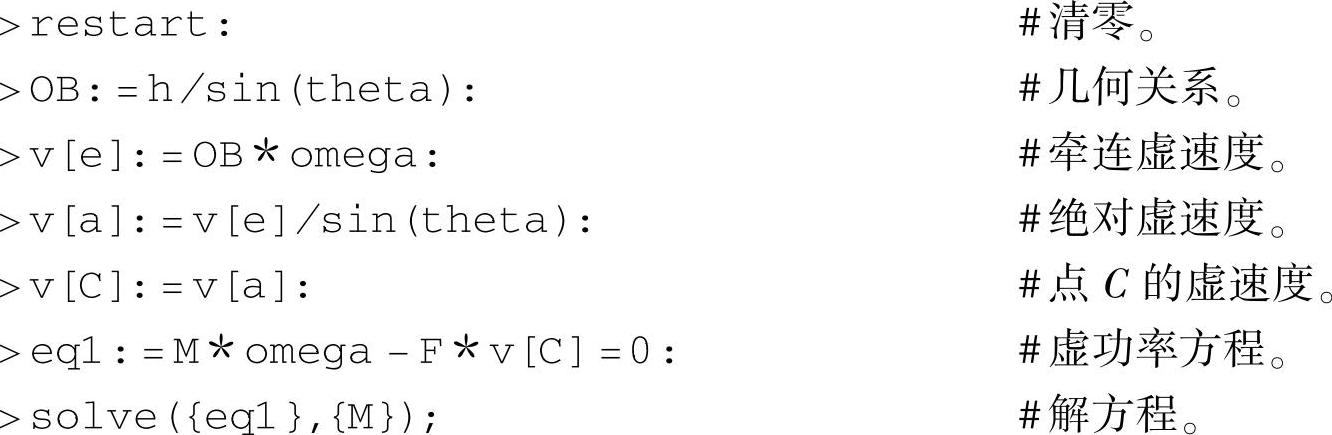
解法二:●建模
用虚速度法求解。平衡系统受主动力:F,M。
●Maple程序
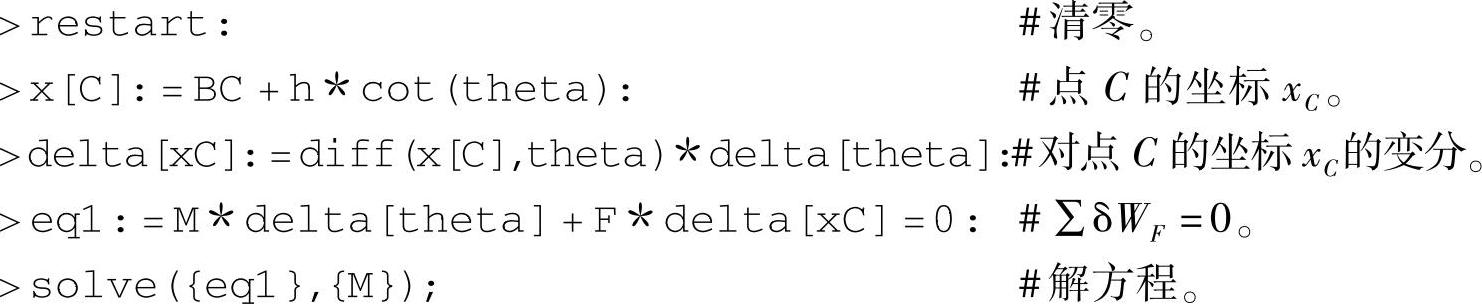
解法三:●建模
用解析法求解。平衡系统受主动力:F,M。
●Maple程序
答:主动力偶矩M与主动力F之间的关系为 。
。
例17-5 求图17-17a所示无重组合梁支座A的约束力。
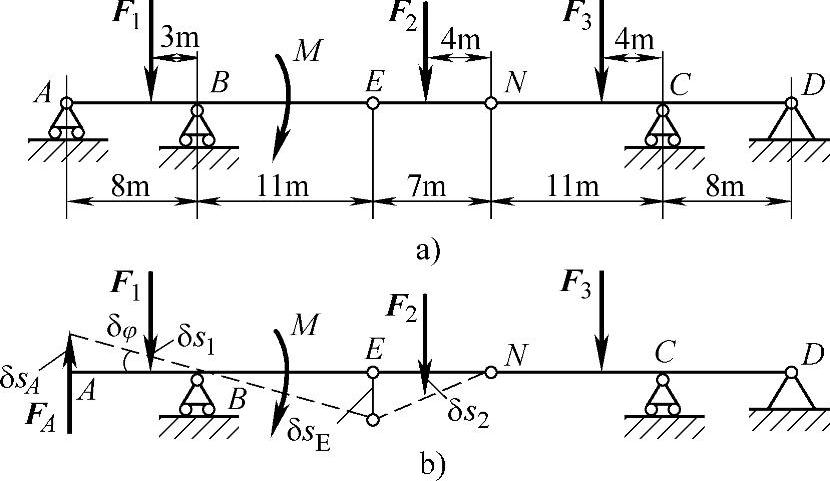
图17-17 例17-5图
已知:F1,F2,F3,M,a1=8m,a2=11m,a3=7m,a4=11m,a5=8m,b1=3m,b2=4m,b3=4m。
求:FA。
解:●建模
用虚位移原理求解。解除支座A的约束,代之以约束力FA,将FA看做为主动力,则结构变成图17-17b所示的机构。
机构平衡系统受主动力:FA,F1,F2,M。
●Maple程序
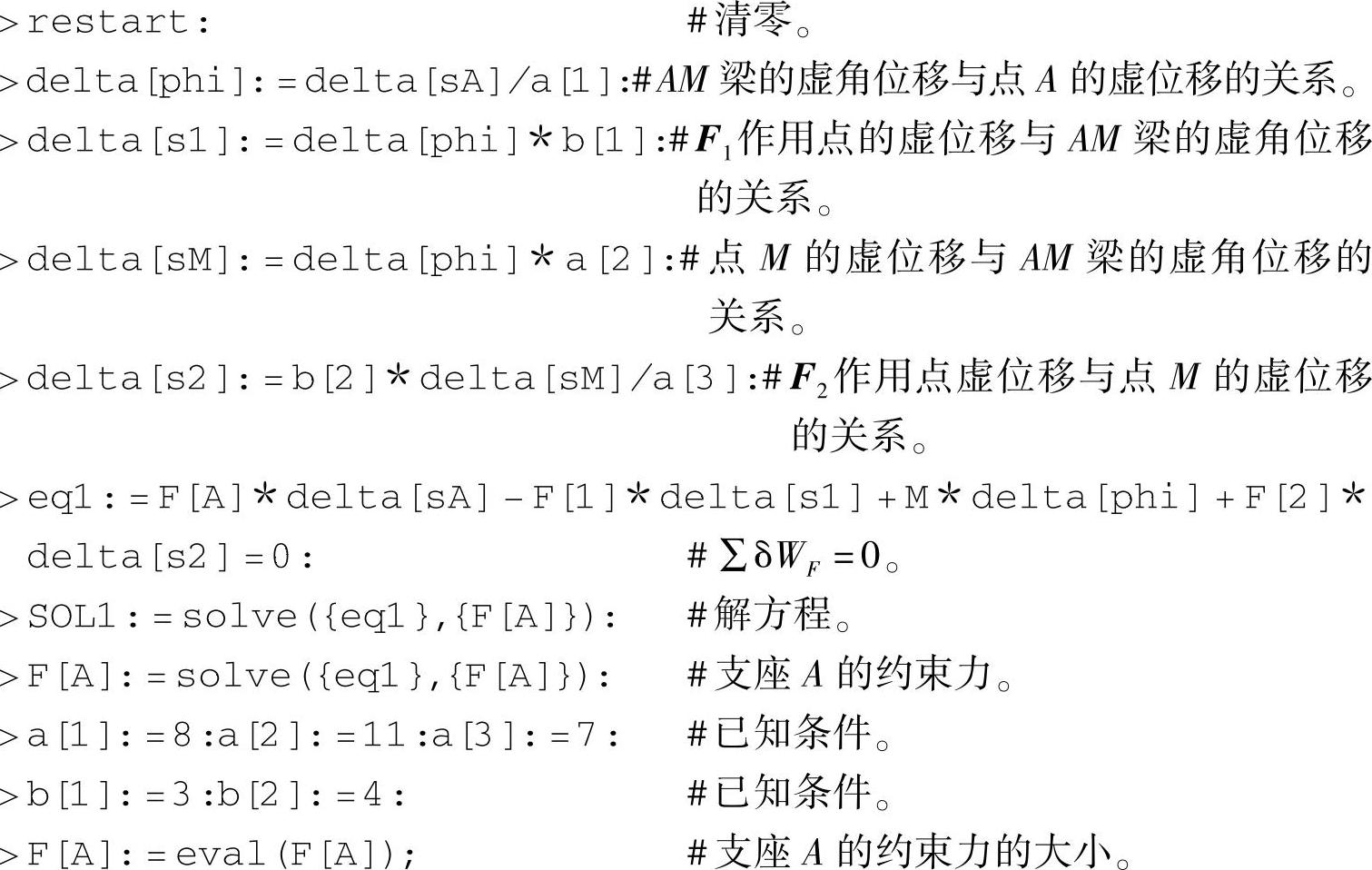
答:支座A的约束力 。
。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






