1.自由度
虚位移δxi,δyi,δzi(i=1,2,…,n)满足由r+s个方程组成的方程组(17-9)和方程组(17-10)独立的虚位移数目称为系统的自由度。今后我们总是用f表示自由度。显然
f=3n-r-s (17-20)
例9 一个质点在空间中运动有3个自由度。
例10 两个质点用杆连接在平面上运动有3个自由度(图17-7)。
例11 冰刀(图17-1)有2个自由度。
例12 沿着固定或运动曲面运动的质点有2个自由度。
例13 两个杆用柱铰链相连在平面内运动(剪刀)有4个自由度。
2.广义坐标
我们研究有约束式(17-1)、式(17-2)的非自由质点系,假设r个关于3n个变量xi,yi,zi(i=1,2,…,n)的函数fk是相互独立的(这里时间t看做参数),反之,约束中一定有一个是与其他矛盾的或者可以从其他得到的。
确定系统可能位置的参数的最小数目称为独立广义坐标数,因为函数fk(k=1,2,…,r)是相互独立的,广义坐标数(用m表示)等于3n-r。广义坐标可以从3n个笛卡儿坐标xi,yi,zi中选取m个,使得方程(17-1)相对它们可以解出。然而一般来说,这样选择广义坐标的方法在实践中很少使用。可以选取任意m个独立的可以确定系统位形的量q1,q2,…,qm,它们可以是距离、角度、面积,也可以是没有直接几何意义的,只需要相互独立并且可以将笛卡儿坐标ri,xi用q1,q2,…,qm和t表示出来:
ri=ri(q1,q2,…,qm,t) (i=1,2,…,n) (17-21a)
xi=xi(q1,q2,…,qm,t) (i=1,2,…,3n) (17-21b)
将这些函数代入式(17-1)后,得到完整系统约束恒等式:
gk(q1,q2,…,qm,t)=0 (k=1,2,…,r) (17-22)矩阵

的秩等于m。由此可知,在式(17-21)的3n个关于q1,q2,…,qm的函数(t为参数)xi中,有m个独立,用它们可以表示出系统的其他坐标。
我们假设选择广义坐标q1,q2,…,qm,使得系统的任意可能位置都可以在q1,q2,…,qm取某些值时利用式(17-21)得到。如果不能得到所有可能位置,则局部地引入广义坐标,即对于不同的可能位置集合引入不同的广义坐标。
我们假设函数(17-21)对其所有自变量都是二阶连续可微的。此外,我们认为,如果系统是定常的,则通过选择广义坐标总是可以使时间t不显含在关系式(17-21)中。
在研究具体问题时,经常完全不需要建立约束方程(17-22),根据问题的物理意义就能知道,确定系统可能位置所必需的广义坐标数量。如果解题时需要关系式(17-22)可以借助几何意义建立。
3.广义坐标空间
对于每个时刻t,系统的可能位置和m维空间(q1,q2,…,qm)之间一一对应,空间(q1,q2,…,qm)称为坐标空间(或构形空间)。系统的每个可能位置对应于坐标空间中的某个点,该点称为映射点。系统的运动对应于映射点在坐标空间中的运动。
坐标空间中点的距离自然地用系统相应的位置之间的距离定义,这样,在系统位置和坐标空间的点之间存在着连续的一一对应关系。
例14 质点在平面上运动,坐标空间就是这个平面。
例15n个自由质点在空间中运动,坐标空间是3n维欧氏空间。

图17-5 单摆
例16(单摆) 将单摆看做一端固定不动的刚性杆,单摆的位置用广义坐标角φ确定(图17-5),将单摆的每个位置对应于坐标为φ的数轴上的点。由于数轴上不同的点φ和φ+2kπ(k=±1,±2,…)对应着单摆的同一个位置,因此单摆位置和数轴上的点不是一一对应的。从数轴上划分出的一个半开区间0≤φ<2π可以实现与单摆位置的一一对应。但这样破坏了连续性,因为单摆的两个邻近位置φ=0和φ=2kπ-ε不是半开区间的邻近点。为了保证连续性,需要认为φ=0和φ=2kπ是同一个点。直观地可以这样做:“粘接上”φ=0点和φ=2kπ点,得到的几何形状——圆就是单摆的坐标空间。
例17(双摆) 由两个刚性杆用柱铰链连接,一个杆的自由端悬挂于固定点A(图17-6),另一个杆可以在一个平面内自由运动。广义坐标可以取两个杆与竖直方向的夹角φ和ψ,双摆的每个位置对应于两个不超过2π的数φ和ψ,因此如果我们取φ,ψ平面上边长为2π的正方形,并认为对边是同一条线段,则得到双摆的坐标空间。直观地可以这样做:“粘接上”正方形的对边,第一次粘接得到圆柱,此后第二次粘接得到的几何形状是圆环。(www.daowen.com)
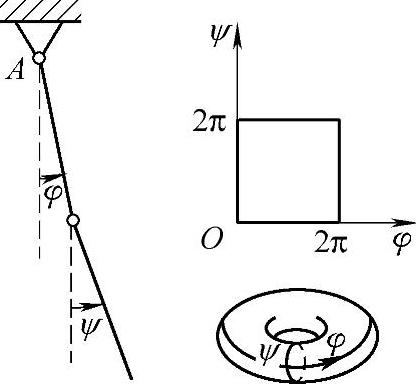
图17-6 双摆
例18 用杆连接的两个质点在平面上运动(图17-7),广义坐标可以取一个点的笛卡儿坐标x,y和杆与Ox轴的夹角φ;坐标空间是空间(x,y,φ)中的一层,用平面φ=0和φ=2kπ分割开来,并认为这两个平面是同一个。这里与实例15和实例16不同的是,无法直观地“粘接上”平面φ=0和φ=2kπ。

图17-7 刚体的平面运动
4.广义速度和广义加速度
在系统运动时广义坐标随时间变化, 和
和 (j=1,2,…,m)称为广义速度和广义加速度。利用微分复合函数(17-21)可以求出系统各点速度
(j=1,2,…,m)称为广义速度和广义加速度。利用微分复合函数(17-21)可以求出系统各点速度 加速度
加速度 和可能位移dri的笛卡儿坐标形式:
和可能位移dri的笛卡儿坐标形式:


这里给出后面会用到的两个等式:
证明:第1个等式直接从式(17-23a)就可以得到。利用式(17-23a)以及函数ri对其自变量微分的顺序可交换,第2个等式容易通过微分推导出。因为假设函数ri是二阶连续可微的,微分可交换性成立,于是得

我们下面将非完整约束方程(17-2)写成广义坐标形式。将式(17-21b)和式(17-23)代入式(17-2)得

其中,bkj=bkj(q1,q2,…,qm,t),bk0=bk0(q1,q2,…,qm,t)由下面等式确定:

这里的aki,ak0中的x1,x2,…,x3n利用式(17-21b)作了代换。
不论是完整系统还是非完整系统,广义坐标qj(j=1,2,…,m)相互独立并且可以任意取值。对于完整系统,广义速度 相互独立并且可以任意取值;但对于非完整系统,广义速度不是独立的,它们受s个关系式(17-26a)的限制。
相互独立并且可以任意取值;但对于非完整系统,广义速度不是独立的,它们受s个关系式(17-26a)的限制。
对于完整系统,dqj相互独立并且可以任意取值;但对于非完整系统,dqj不是独立的,它们受s个关系式(17-26b)的限制。
5.用广义坐标表示的虚位移
引入δqj(j=1,2,…,m)为广义坐标的等时变分,即同一时刻、同一位置两组广义坐标微分之差
δqj=dqj(1)-dqj(2)。(j=1,2,…,m) (17-27)
根据式(17-23c),选择两组可能位移相减可得

对于完整系统,δqj相互独立并且可以任意取值;但对于非完整系统,δqj不是独立的,它们受如下s个关系式的限制,即

由此可知,完整系统的自由度f与广义坐标数m相等,即f=m;非完整系统的自由度f小于广义坐标数m,即f<m,在数量上少了不可积微分约束的个数,则f=m-s。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






