1.真实位移
一般来说,真实位移是实际发生的无穷小位移,质点系满足动力学基本定律,初始条件和约束条件的无穷小位移称为真实位移。我们把质点系满足运动微分方程,初始条件ri(t0)=ri0, 和约束条件式(17-7)和式(17-8)与dt呈线性关系的无穷小位移,称为真实位移。真实位移是可能位移的一个。
和约束条件式(17-7)和式(17-8)与dt呈线性关系的无穷小位移,称为真实位移。真实位移是可能位移的一个。
2.虚位移
一般来说,质点系在约束允许的条件下,与∙时∙间∙的∙变∙化∙Δt=dt无∙关∙的微小位移称为虚位移。设在时刻t=t∗处于矢径ri∗确定的某个位置,我们把虚位移定义为满足下面线性齐次方程组的δri=δri∗(i=1,2,…,n)集合:

这里 ,aki是在t=t∗,ri=ri∗时计算的,均为xi(i=1,2,…,3n)和t的函数。
,aki是在t=t∗,ri=ri∗时计算的,均为xi(i=1,2,…,3n)和t的函数。
设δri的分量为δxi,δyi,δzi,因为3n-r-s1>0,即未知数δxi,δyi,δzi(i=1,2,…,n)的数目大于它们必须满足的方程组(17-9)和方程组(17-10)的个数,所以存在无穷多个虚位移δri∗。
3.真实位移、可能位移和虚位移的关系
对于具有双向、定常约束的完整系统,可能位移满足的方程(17-7)变成为

这里 为xi(i=1,2,…,3n)的函数。比较式(17-9)和式(17-11),可能位移的集合与虚位移集合完全相同。由此可知:对于具有双向、定常约束的完整系统真实位移是虚位移之一。
为xi(i=1,2,…,3n)的函数。比较式(17-9)和式(17-11),可能位移的集合与虚位移集合完全相同。由此可知:对于具有双向、定常约束的完整系统真实位移是虚位移之一。
例8 对于斜面固定和作平行移动两种情形,分析沿斜面运动质点的可能位移和虚位移。
解:斜面固定时,质点的可能位移和虚位移相同(图17-4a)。斜面作已知规律的平行移动时,质点的可能位移应考虑牵连运动的影响,而质点的虚位移等于约束凝固时的可能位移,与斜面固定时的可能位移相同(图17-4b)。
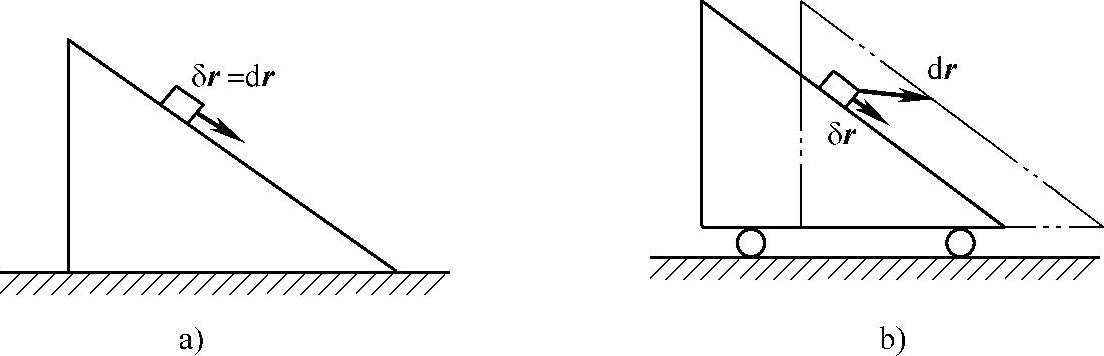
图17-4 实例8图
a)斜面固定 b)斜面平行移动
对于具有双向、速度齐次约束的非完整系统,可能位移满足的方程(17-8)变成为

这里aki为xi(i=1,2,…,3n)和t的函数。比较式(17-10)和式(17-12),可能位移的集合与虚位移集合完全相同。由此可知:对于具有双向、速度齐次约束的非完整系统真实位移是虚位移之一。
对于例7中,实位移dx,dy满足:
dy-tdx=0 (e)
虚位移δx,δy满足:
δy-tδx=0 (f)
比较式(e)与式(f)可知,虽然约束是非定常的,但真实位移是虚位移中的一个。(https://www.daowen.com)
4.等时变分
无穷小增量δxi,δyi,δzi称为xi,yi,zi的变分。在t=t∗固定时,从矢径ri∗确定的位置,变化到无限接近的由矢径ri∗+δri确定的位置,称为等时变分。在等时变分中我们不考察系统的运动过程,而是比较系统在给定时刻约束允许的无限接近的位置(构形)。
虚位移定义为质点系在同一时刻、同一位置两组可能位移之差,即δri=dri(1)-dri(2)(i=1,2,…,n),或δxi=dxi(1)-dxi(2)(i=1,2,…,3n)。
现在我们研究两个在相同时间dt内的可能位移。根据式(17-6),有


可能速度vij∗和可能加速度aij∗(j=1,2)满足式(17-2)~式(17-5)。将两组可能位移相减,得

(1)若尔当变分
先将t=t∗,ri=ri∗,vi=v∗i1代入方程(17-3)并在两边同时乘以dt,然后将t=t∗,ri=ri∗,vi=vi2∗代入方程(17-3)并在两边同时乘以dt,最后将得到的两个方程相减,得

类似地,由方程(17-2)可得

如果δvi=v∗i1-v∗i2≠0,则式(17-13)中的主要部分是dt的线性项,即δvidt,并且根据式(17-14)和式(17-15)知,它满足方程组(17-9)和方程组(17-10),即虚位移δri的分量是

在v∗i1≠vi2∗的假设下,这个等时变分称为若尔当变分。
(2)高斯变分
利用相同的过程处理式(17-4)和式(17-5)(只是要代入ai=aij∗(j=1,2),乘以 ,可以得到
,可以得到
如果v∗i1=v∗i2,但δai=a∗i1-a∗i2≠0,则式(17-13)中的主要部分等于 。当v∗i1=v∗i2时,式(17-17)和式(17-18)除了第1项以外的所有求和项都等于零。根据式(17-17)和式(17-18)知,它满足方程组(17-9)和方程组(17-10),即虚位移δri的分量是
。当v∗i1=v∗i2时,式(17-17)和式(17-18)除了第1项以外的所有求和项都等于零。根据式(17-17)和式(17-18)知,它满足方程组(17-9)和方程组(17-10),即虚位移δri的分量是

在v∗i1=vi2∗,但a∗i1≠ai2∗的假设下,这个等时变分称为高斯变分。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







