如果物体的几何形状、约束情况及所受的外力都对称于空间的某一根轴,因此在物体中通过该轴的任何平面都是对称面,所有应力、应变和位移也对称于该轴,这类问题称为轴对称问题。研究轴对称问题时通常采用圆柱坐标系(r,θ,z),以z轴为对称轴。如图6-1所示的受均布内压作用的长圆筒,通过z轴的任意一个纵截面都是对称面。图6-2、图6-3所示的受力状态也是轴对称问题,因为通过z轴的任意一个纵截面都是对称面。
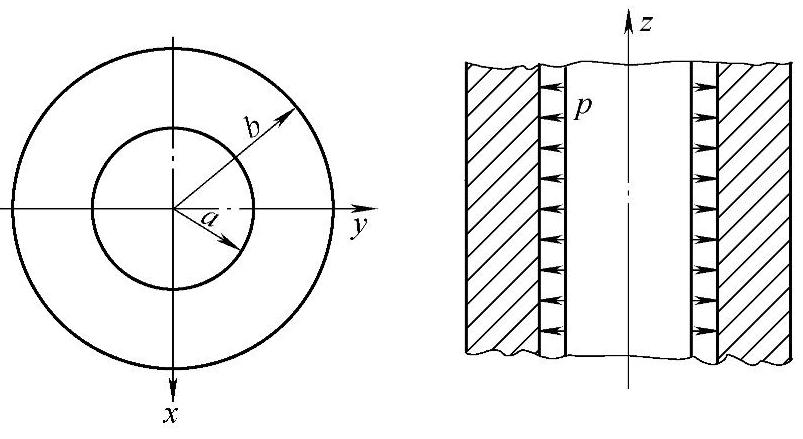
图6-1 受均布内压作用的长圆筒
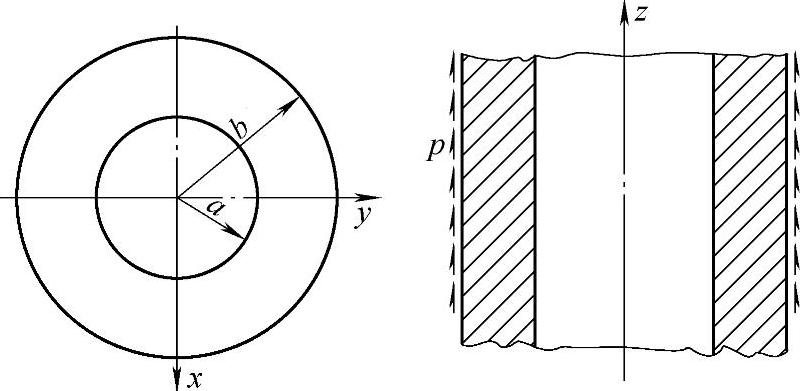
图6-2 外表面受均布面力作用的长圆筒
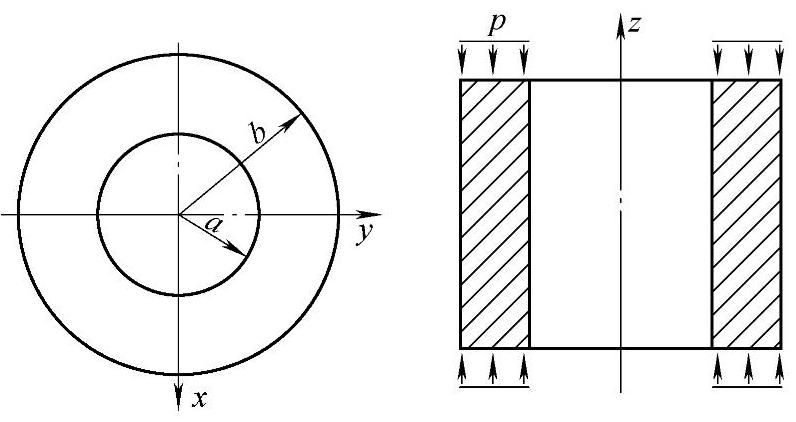
图6-3 两个端面受到均布压力作用的短圆筒
研究轴对称问题时,通常选择由相距dr的两个圆柱面,相距dz的两个水平面,夹角为dθ的两个垂直面分割成的六面体来研究,如图6-4a所示,图6-4b为单元体的横截面,图6-4c为单元体的纵截面。由于对称性,垂直于对称面的两个剪应力分量τrθ,τzθ不存在。如果存在τrθ、τzθ这两个剪应力分量,将破坏轴对称问题的对称性。轴对称问题共有4个应力分量:
式中,σr表示沿半径方向的正应力,称为径向应力;σθ表示沿θ方向的正应力,称为环向应力或切向应力;σz表示沿z方向的正应力,称为轴向应力;τzr表示在圆柱面上沿z方向作用的剪应力。
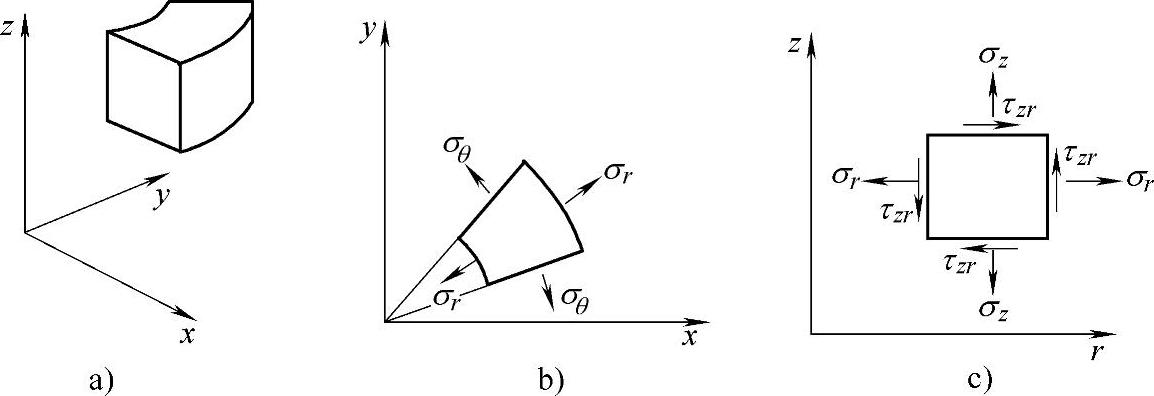
图6-4圆柱坐标系中的单元体
同样,轴对称问题共有4个应变分量:

式中,εr表示沿半径方向的正应变,称为径向正应变;εθ表示沿θ方向的正应变,称为环向正应变或切向正应变;εz表示沿z方向的正应变,称为轴向正应变;γzr表示沿r和z方向的剪应变。
在轴对称问题中,弹性体内任意一点上,不存在切向位移,只存在径向位移u和轴向位移w,两个位移分量表示为,

在前面章节讨论弹性力学平面问题的有限元法时,先由将弹性体划分为有限个单元的组合体,由虚功方程得到单元刚度矩阵,集成后得到整体刚度矩阵。在这里,用虚功方程直接得到轴对称问题的有限元列式。
由虚功方程可得,外力虚功等于内力虚功或虚应变能,

式中,F为真实的体力;p为真实的面力;f*为虚位移;ε*为对应于虚位移的虚应变。
将弹性体离散后,作用在弹性体上的外载荷移置到结点上,在每个结点上外力只有径向分量U1,U2,…,Un,轴向分量W1,W2,…,Wn,写成向量形式如式(6-5)所示。
F=〔U1W1U2W2…UnWn〕T (6-5)(www.daowen.com)
每个结点的虚位移也只有径向分量u1*,u2*,…,un*,轴向位移分量w1*,w2*,…,wn*,写成向量形式如式(6-6)所示。
δ*=(u1*w1*u2*w2*…un*wn*)T (6-6)
在单元中由虚位移引起的虚应变为
ε*e=Bδ*e (6-7)
单元中的实际应力为
σe=DBδe (6-8)
采用一些圆环单元将轴对称体离散,这些单元与对称面rz正交的截面形式各不相同,图6-5为三结点三角形环状单元。
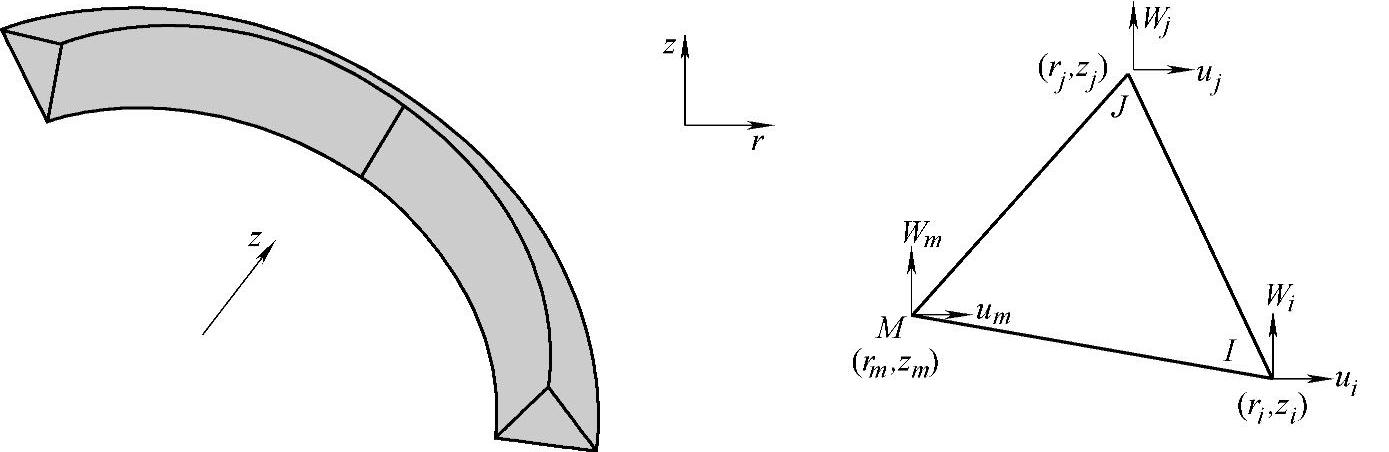
图6-5 三结点三角形环状单元
离散后的单元组合体的虚功方程为,

 为单元刚度矩阵。
为单元刚度矩阵。
对于轴对称问题,在圆柱坐标系中,所有物理量与圆周角度无关,可以得到以下的多重积分,

单元结点位移向量与整体结点位移向量之间的关系定义如下:
δ*e=Te{δ*},其中Te为转换矩阵。
将式(6-11)和用整体结点位移表示的单元结点位移代入式(6-10)可得

定义 为整体刚度矩阵,得到方程组
为整体刚度矩阵,得到方程组
Kδ=F (6-13)
根据位移约束条件修改整体刚度矩阵之后,可以由式(6-13)解出全部的未知结点位移分量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






