静力学是力学的一个分支,研究主体平衡时的受力状况。使用静态分析可确定机构在承受已知力时的状态。机构中所有负荷和力处于平衡状态,并且势能为零。静态分析比动态分析能更快地识别出静态配置,因为静态分析在计算中不考虑速度。下面介绍一下进行创建静态分析的一般步骤。
(1)单击工具栏中的【机构分析】按钮 ,系统弹出【分析定义】对话框。
,系统弹出【分析定义】对话框。
(2)输入名称或接受默认名称【AnalysisDefinition1】。
(3)在【类型】下拉列表中,选择【静态】。
(4)完成【首选项】、【电动机】及【外部载荷】选项卡,输入所需信息。
(5)单击【运行】按钮,查看创建的分析,然后单击【确定】按钮,完成静态分析的创建。
下面以实例说明创建静态分析的一般过程。
1.打开模型
(1)启动Creo Parametric 2.0,单击工具栏中的【打开】按钮 ,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0703│ch070308文件中的“ch070308.asm”,如图7-69所示。
,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0703│ch070308文件中的“ch070308.asm”,如图7-69所示。
(2)单击【文件】→【管理会话】→【选择工作目录】,设置工作目录至ch07│ch0703│ch070308。
2.创建快照
(1)单击【应用程序】→【机构】,进入运动仿真模块。
(2)单击【拖动元件】按钮 ,弹出【拖动】对话框,如图7-70所示。鼠标左键单击摆杆上一点,拖动摆杆将模型调整至图7-71所示的状态,然后单击对话框中的【快照】按钮
,弹出【拖动】对话框,如图7-70所示。鼠标左键单击摆杆上一点,拖动摆杆将模型调整至图7-71所示的状态,然后单击对话框中的【快照】按钮 ,生成【snapshot1】快照。
,生成【snapshot1】快照。
3.定义力
(1)单击工具栏中的【力/力矩】按钮 ,系统弹出【力/力矩】对话框。
,系统弹出【力/力矩】对话框。
(2)单击【类型】下拉列表,选择【点力】,并且选择“baiqiu.prt”上的PNT0基准点。
(3)定义力的模与方向。选择【模】下拉列表中的【常数】选项,在【常数】输入框中输入模的大小为20N;单击对话框中的【方向】按钮,弹出【方向】选项卡,在【定义方向】下拉列表中选择【键入的方向】选项,Y和Z方向输入0,X输入1,勾选【基础】选项,如图7-72所示,单击【确定】按钮,完成力的定义。
图7-69 装配体

图7-70 拖动对话框

图7-71 模型状态

图7-72 模与方向的定义
4.定义质量属性
(1)单击工具栏中的【质量属性】按钮 ,系统弹出【质量属性】对话框。
,系统弹出【质量属性】对话框。
(2)选择【零件】类型,选择“baiqiu.prt”元件,在【定义属性】下拉列表中选择【密度】选项,并设置其密度为7.8e-9,如图7-73所示,单击【确定】按钮。
5.定义重力
(1)进入运动仿真模块后,单击工具栏中的【重力】按钮 ,系统弹出【重力】对话框。(www.daowen.com)
,系统弹出【重力】对话框。(www.daowen.com)
(2)定义模的大小和重力的方向,X和Y方向输入0,Z方向输入1,单击【确定】按钮,完成重力的定义,如图7-74所示。
6.创建静态分析
(1)单击工具栏中的【机构分析】按钮 ,系统弹出【分析定义】对话框。
,系统弹出【分析定义】对话框。
(2)接受默认的分析名称【AnalysisDefinition1】,在【类型】下拉列表中,选择【静态】选项。
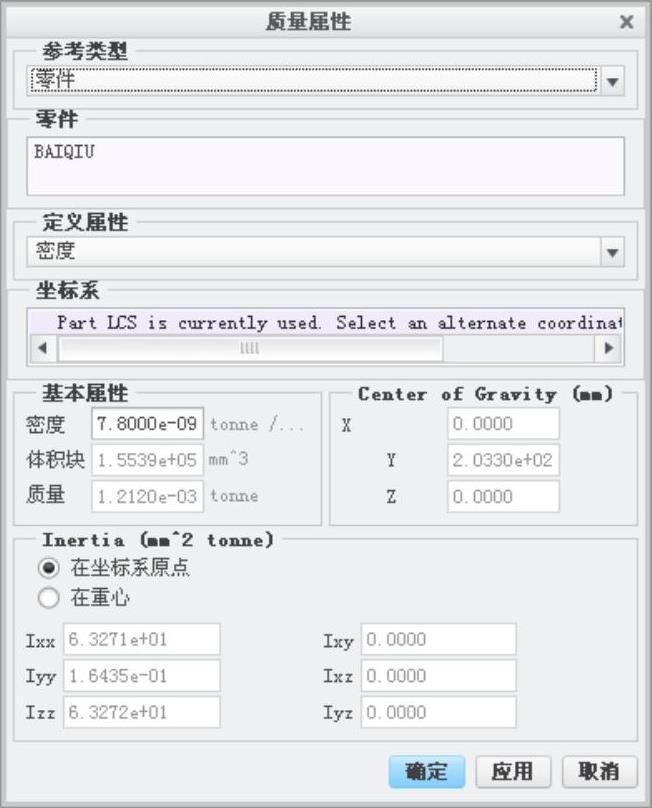
图7-73 质量属性对话框

图7-74 重力对话框
(3)完成电动机首选项,在【初始配置】区域中选中快照【snapshot1】,在【最大步距因子】中取消选中【默认】选项,并输入因子0.01,如图7-75所示。
(4)单击【外部载荷】选项卡,选择【启用重力】复选框,如图7-76所示。
(5)单击【运行】按钮,查看创建的分析,系统弹出【图形工具】对话框,如图7-77所示。主体的加速度逐渐变为0并停止,主体受力平衡,如图7-78所示,然后单击【确定】按钮,完成静态分析的创建。
注意
最大步距因子能够改变静态分析中的默认步长,它是一个处于0 1的常数,在分析具有巨大加速度的机构时,推荐减小此值。

图7-75 首选项选项卡

图7-76 外部载荷选项卡
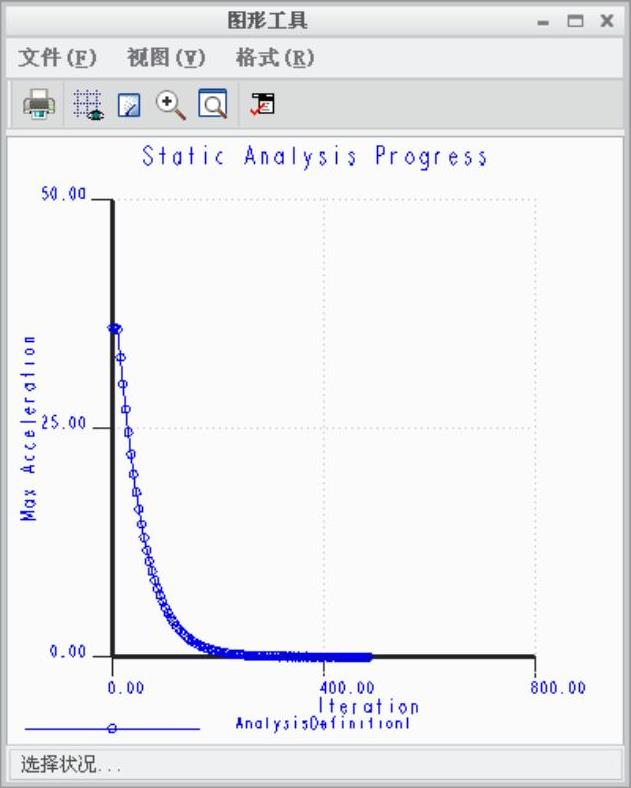
图7-77 图形工具对话框
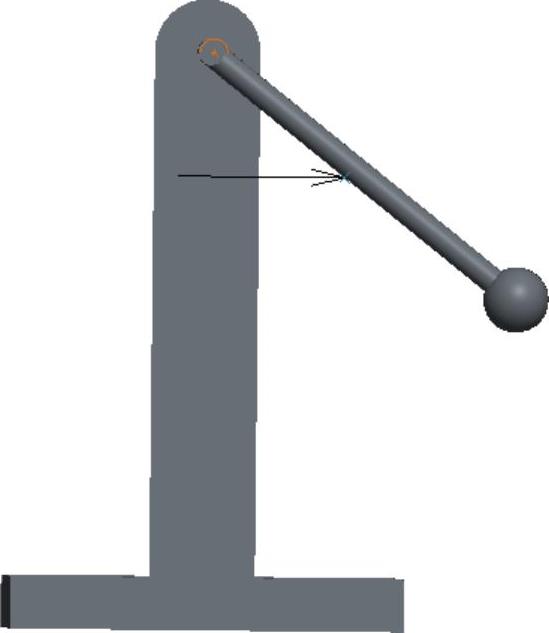
图7-78 主体受力平衡
7.保存查看模型
(1)单击【回放】按钮 ,系统弹出【回放】对话框,如图7-79所示。
,系统弹出【回放】对话框,如图7-79所示。
(2)单击【回放】对话框中的保存按钮 ,保存分析结果到指定的位置。
,保存分析结果到指定的位置。
(3)在【回放】对话框中单击按钮 ,系统弹出【动画】对话框,如图7-80所示。单击对话框中的【捕获】按钮,系统弹出【捕获】对话框。单击对话框中的【浏览】按钮,系统弹出【保存副本】对话框,指定保存位置,在【名称】输入框中输入视频名称“ch070308.mpg”,单击【确定】按钮,然后在【捕获】对话框中单击【确定】按钮,生成mpg视频文件。
,系统弹出【动画】对话框,如图7-80所示。单击对话框中的【捕获】按钮,系统弹出【捕获】对话框。单击对话框中的【浏览】按钮,系统弹出【保存副本】对话框,指定保存位置,在【名称】输入框中输入视频名称“ch070308.mpg”,单击【确定】按钮,然后在【捕获】对话框中单击【确定】按钮,生成mpg视频文件。

图7-79 回放对话框

图7-80 动画对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




