机构分析与定义是指对模型在伺服电动机的作用下模拟机构的运动并进行运动分析。分析时先指定分析的类型,再在【首选项】选项卡中设置运动仿真的【时间】、【帧数】、【帧频】和【最小间隔】等参数,然后在【电动机】选项卡中选择伺服电动机并设定其开始时间与终止时间,最后模拟机构的运行。
单击工具栏中的【机构分析】按钮 ,系统弹出【分析定义】对话框,如图7-10所示。
,系统弹出【分析定义】对话框,如图7-10所示。
下面介绍【分析定义】中各个图标的具体含义及用法。
(1)【名称】:输入此次分析的名称。
(2)【类型】:该下拉列表中包含了5种机构分析类型:
【运动学】:运动学是动力学的一个分支,它考虑除质量和力之外运动的所有方面。运动分析不考虑受力,因此不能使用执行电动机,也不必为机构指定质量属性。模型中的动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,不会影响运动分析。
【位置】:由伺服电动机驱动的一系列组件分析。只有运动轴或几何伺服电动机可进行位置分析,不考虑受力。
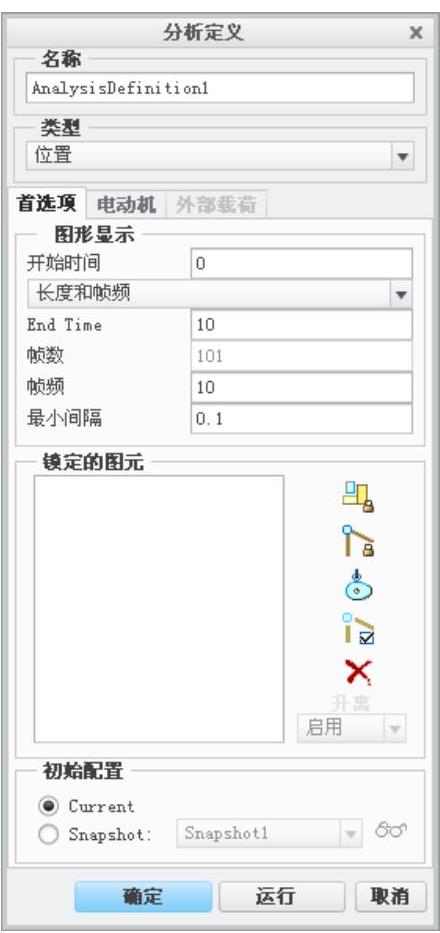
图7-10 分析定义对话框
注意
位置分析与运动学分析的区别在于,运动学分析可计算机构中的点或运动轴的位置、速度和加速度;而位置分析只测量位置,而且运动学分析和位置分析只在运动学仿真与分析中进行。
【动态】:动态分析是力学的一个分支,主要研究主体运动(有时也研究平衡)的受力情况和力之间的关系以及主体质量与主体运动之间的关系。
【静态】:静力学是力学的一个分支,研究主体平衡时的受力状况,使用静态分析可确定机构在承受已知力时的状态。静态分析比动态分析能更快地识别出静态配置,因为静态分析在计算中不考虑速度。
【力平衡】:力平衡分析是指为了保持机构在特定位置的静止状态,计算在特定点需要施加力的大小的过程。
(3)在【首选项】选项卡有三种测量时间域的方式,分别是:
【长度和帧频】:输入开始时间、终止时间和帧频(每秒运行的帧数),系统计算总的帧数和时间运行长度。
【长度和帧数】:输入开始时间、终止时间和帧数,系统计算帧频和时间运行长度。
【帧频和帧数】:输入总帧数和帧频,系统计算结束时间。
注意
帧频=1/最小时间间隔,帧数=帧频×时间长度+1
 :锁定主体。
:锁定主体。
 :创建连接锁定。
:创建连接锁定。
 :删除锁定的图元。
:删除锁定的图元。
 :启用和禁用连接。(https://www.daowen.com)
:启用和禁用连接。(https://www.daowen.com)
(4)【初始配置】下有两个选项:
【Current】(当前):以机构当前的位置为初始位置。
【Snapshot】(快照):以前面元件拖动所拍得的快照来定义初始位置。
(5)【运行】:运行所定义的运动分析。
(6)【确定】:完成运动分析的定义。
(7)单击【分析定义】中的【电动机】,系统切换至【电动机】选项卡,如图7-11所示。如果有多个电动机,需要调节电动机的顺序,可以在【电动机】选项卡中调整电动机的顺序。单击电动机后面的【开始】或【终止】可以输入相应的时间值,右侧的图标分别表示以下功能:
 :添加电动机。
:添加电动机。
 :删除电动机。
:删除电动机。
 :添加机构中所有的电动机。
:添加机构中所有的电动机。
下面以实例说明模型分析的一般方法。
(1)启动Creo Parametric 2.0,单击工具栏中的【打开】按钮 ,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0702│ch070203文件中的“z-clcd.asm”。
,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0702│ch070203文件中的“z-clcd.asm”。
(2)单击【文件】→【管理会话】→【选择工作目录】,设置工作目录至ch07│ch0702│ch070203。
(3)单击选项卡中的【应用程序】→【机构】命令按钮,进入运动仿真模块。
(4)单击工具栏中的【机构分析】按钮 ,系统弹出【分析定义】对话框,如图7-12所示。
,系统弹出【分析定义】对话框,如图7-12所示。
(5)接受默认的分析定义的名称,在【类型】复选框中选择【运动学】,选择【长度与帧频】,【开始时间】输入0,【终止时间】输入10,【帧频】输入10,选中【快照】选项,将【snapshot1】定为初始位置。
(6)单击【运行】按钮,可以看到两幅齿轮都运动起来,单击【确定】按钮,完成模型的分析。
注意
由于这个例子中只有一个电动机,所以不需要定义电动机运行的时间,默认为时间域的开始运行到终止。
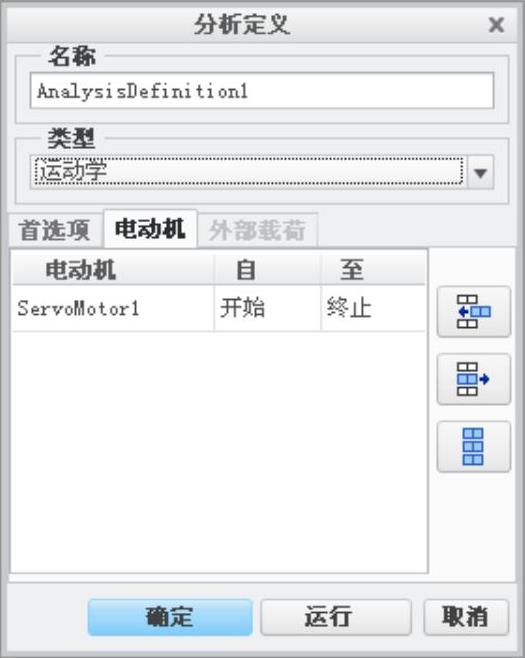
图7-11 电动机选项卡
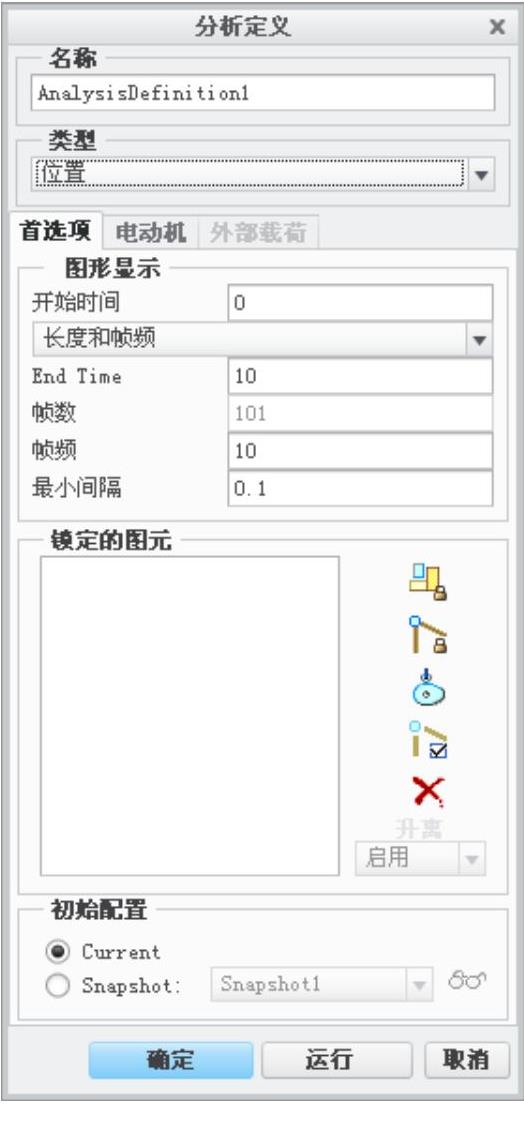
图7-12 分析定义对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





