
伺服电动机能为机构提供驱动,而驱动就是机构的动力源。通过设置伺服电动机可以实现旋转及平移运动,并且能以函数的方式定义运动轮廓。
单击工具栏中的【伺服电动机】按钮 ,系统弹出【伺服电动机定义】和【选择】对话框,如图7-1所示。从对话框中可以看出伺服电动机包括运动轴伺服电动机和几何伺服电动机。运动轴伺服电动机用于沿某一方向明确定义的运动,选择的运动轴可以为移动轴、旋转轴或者由槽连接建立起的槽轴;几何伺服电动机通过指定模型中的几何图元建立运动过程,用于创建复杂的三维运动。
,系统弹出【伺服电动机定义】和【选择】对话框,如图7-1所示。从对话框中可以看出伺服电动机包括运动轴伺服电动机和几何伺服电动机。运动轴伺服电动机用于沿某一方向明确定义的运动,选择的运动轴可以为移动轴、旋转轴或者由槽连接建立起的槽轴;几何伺服电动机通过指定模型中的几何图元建立运动过程,用于创建复杂的三维运动。
单击【轮廓】按钮,可设置伺服电动机的运动类型,如图7-2所示。单击【规范】下拉列表,可以设置电动机的位置、速度、加速度,可分别设置电动机的运动形式。
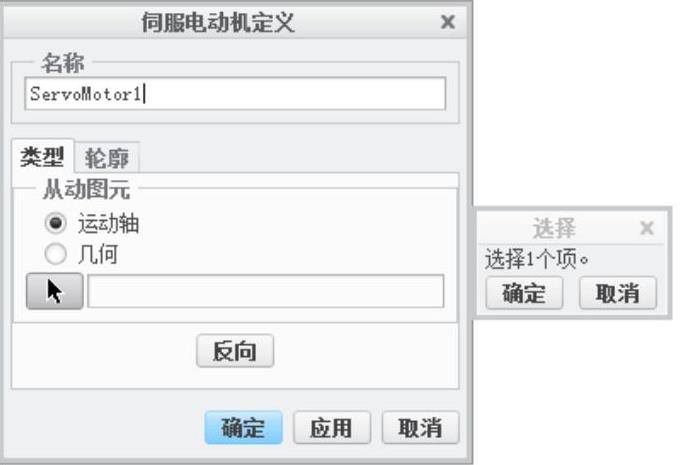
图7-1 伺服电动机定义对话框

图7-2 轮廓对话框
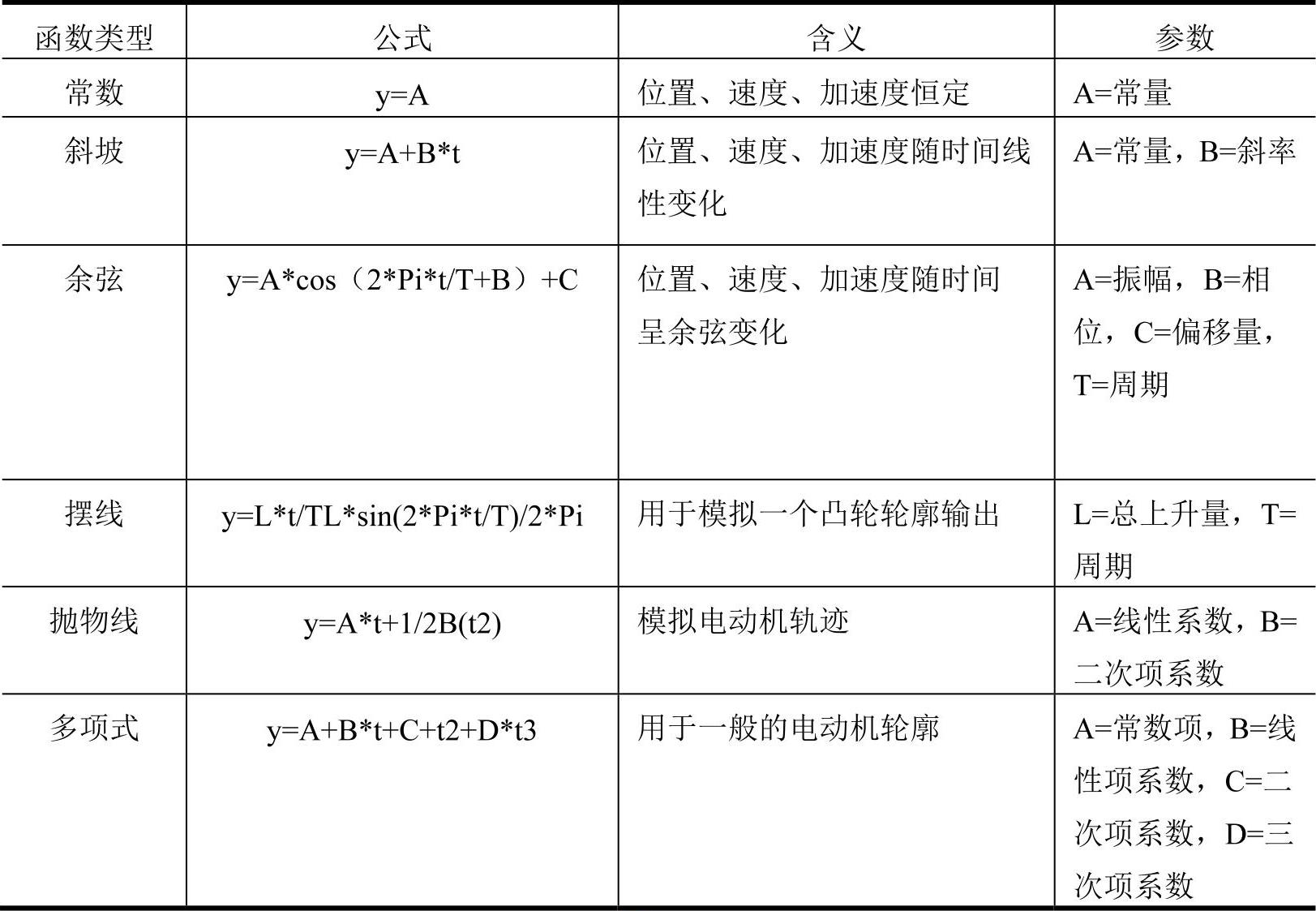
单击【模】下拉列表,可以指定【模】的函数及参数,指定伺服电动机的位置、速度、加速度的变化形式,其常用函数的具体含义如表7-1所示。
【模】下面的【图形】选项组用图形来表示位置、速度、加速度的变化,勾选【在单独图形中】,则一个图形表示一项参数量,否则一个图形表示多个参数量。
下面通过实例介绍定义伺服电动机的一般方法。
(1)启动Creo Parametric 2.0,单击工具栏中的【打开】按钮 ,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0702│ch070201文件中的“z-clcd.asm”。
,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0702│ch070201文件中的“z-clcd.asm”。
(2)单击【文件】→【管理会话】→【选择工作目录】,设置工作目录至ch07│ch0702│ch070201。
(3)单击选项卡中的【应用程序】→【机构】命令按钮,进入运动仿真模块。
表7-1 常用函数
(4)单击工具栏中的【伺服电动机】按钮 ,系统弹出【伺服电动机定义】和【选择】对话框,如图7-3所示。(www.daowen.com)
,系统弹出【伺服电动机定义】和【选择】对话框,如图7-3所示。(www.daowen.com)
(5)在【从动图元】中选择【运动轴】,在绘图窗口中选择图7-4所示的轴作为运动轴。
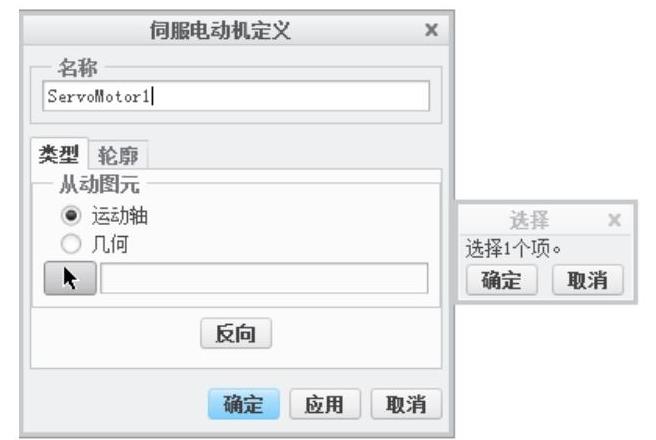
图7-3 伺服电动机定义对话框
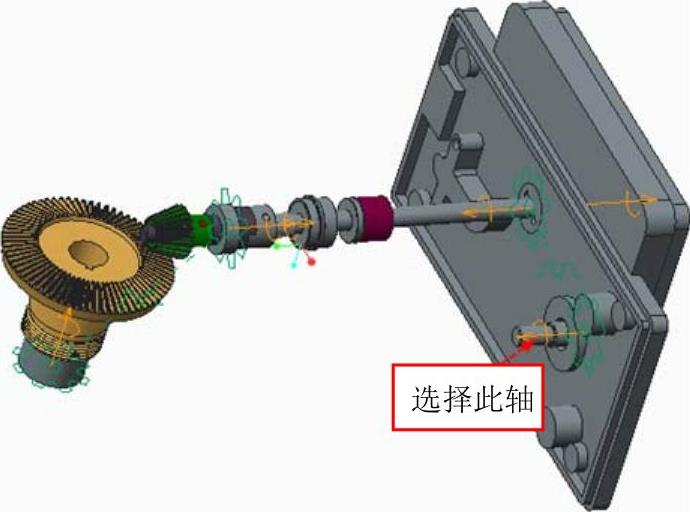
图7-4 选择运动轴
(6)单击【轮廓】选项卡,在【规范】下拉列表中选择【速度】选项,【模】下拉列表中选择【常数】选项,在A输入框中输入速度值500,在【图形】选项卡中选中【位置】、【速度】、【加速度】,如图7-5所示。单击【图形】中的按钮 ,系统弹出【图形工具】对话框,如图7-6所示,观察完后单击关闭按钮
,系统弹出【图形工具】对话框,如图7-6所示,观察完后单击关闭按钮 ,单击【确定】按钮,完成伺服电动机的定义,如图7-7所示。
,单击【确定】按钮,完成伺服电动机的定义,如图7-7所示。

图7-5 伺服电动机定义对话框
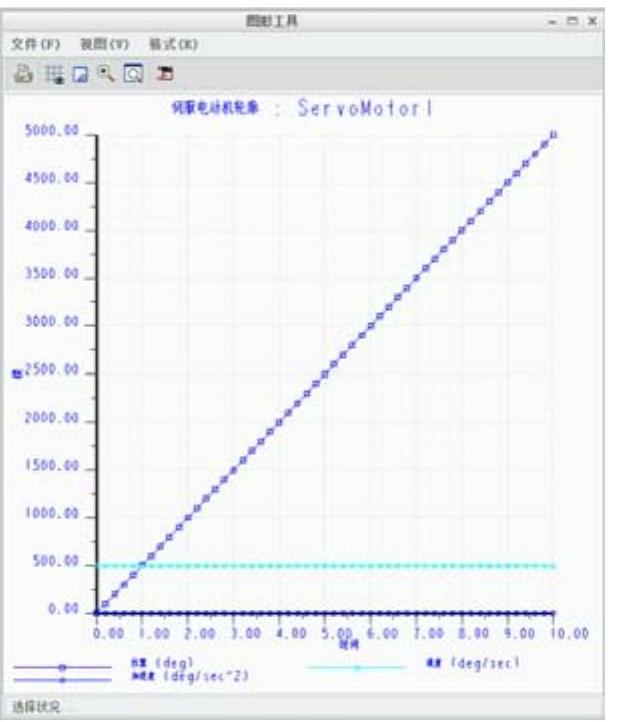
图7-6 图形工具对话框
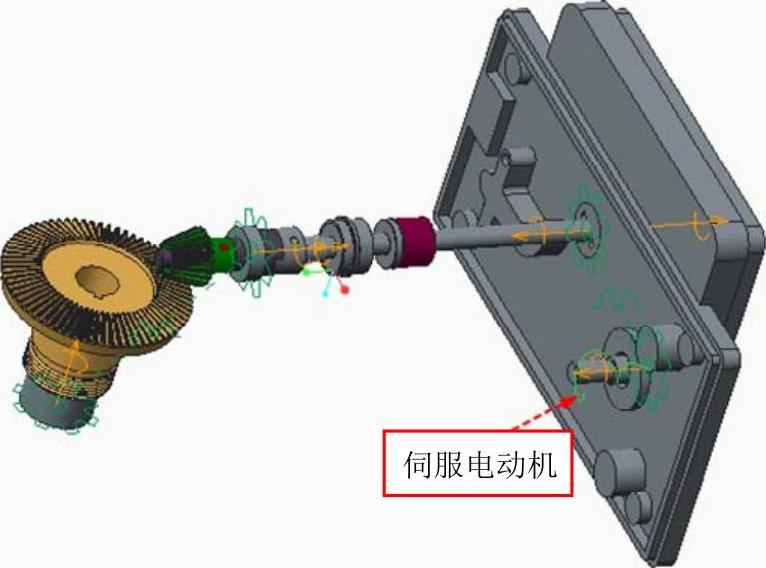
图7-7 伺服电动机定义
注意
选择机构模型树中的【电动机】节点,鼠标右击图中的【ServoMotor1】,在弹出的快捷菜单中选择【编辑定义】命令,打开【伺服电动机定义】对话框,可以对已经定义好的电动机进行修改。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




