本实例将创建机械臂交互展示动画,本动画创建完成后,将可以完全实现角色间的链接关系(相当于约束)。完成后的动画效果如图8-94所示。
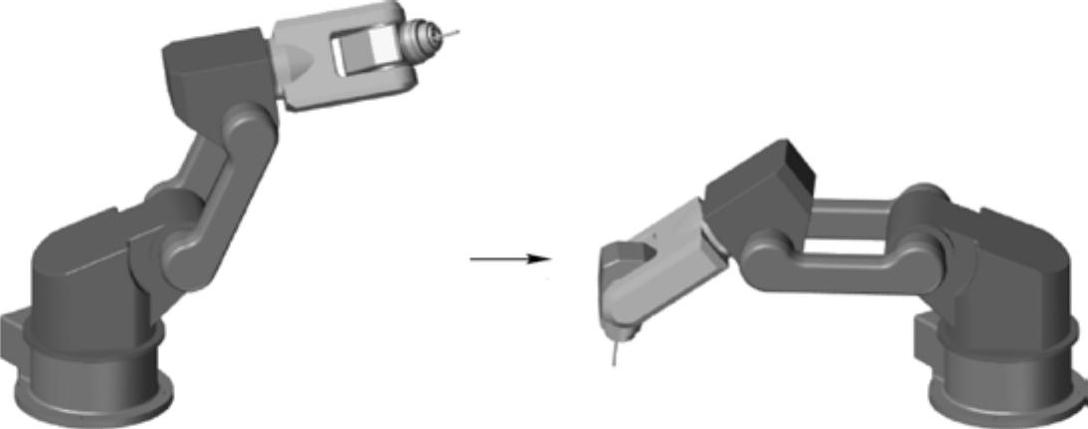
图8-94 本实例要创建的机械臂交互展示动画
【制作分析】
该动画创建的关键是机构链接关系的添加、设置和调整,难点在于枢轴的设置和调整。此外通过本实例的练习,也可以学习一下模型对齐的技巧。
【制作步骤】
 打开本书提供的素材文件“机械臂.SMG”。先隐藏除焊接头和机械手腕之外的角色,如图8-95左图所示,并将焊接头拖动一段距离,然后单击“变换”选项卡中的“对齐”>“线对齐/轴对齐”按钮,将角色对齐,如图8-95右图所示。
打开本书提供的素材文件“机械臂.SMG”。先隐藏除焊接头和机械手腕之外的角色,如图8-95左图所示,并将焊接头拖动一段距离,然后单击“变换”选项卡中的“对齐”>“线对齐/轴对齐”按钮,将角色对齐,如图8-95右图所示。
图8-95 对齐角色
 通过单击“变换”选项卡“链接”按钮下的选项,设置机械臂各角色间的父子关系,如图8-96所示。完成后再将左机械臂单独拖放到右机械臂父对象之下,如图8-97所示,以保证左机械臂能够跟随右机械臂同步运动。
通过单击“变换”选项卡“链接”按钮下的选项,设置机械臂各角色间的父子关系,如图8-96所示。完成后再将左机械臂单独拖放到右机械臂父对象之下,如图8-97所示,以保证左机械臂能够跟随右机械臂同步运动。
 (www.daowen.com)
(www.daowen.com)
图8-96 设置子-父链接关系

图8-97 将相关模型置于父角色之下
 设置底座的链接类型为“刚性”,其余子特征(除左机械臂外)的链接类型为“枢轴”,如图8-98所示,并根据需要设置各子特征枢轴的位置和枢轴的旋转方向(部分无法对齐的枢轴,需要调整父特征的枢轴方向)。
设置底座的链接类型为“刚性”,其余子特征(除左机械臂外)的链接类型为“枢轴”,如图8-98所示,并根据需要设置各子特征枢轴的位置和枢轴的旋转方向(部分无法对齐的枢轴,需要调整父特征的枢轴方向)。
 通过对齐枢轴操作,令父特征的枢轴方向分别与其子特征的枢轴方向一致(该过程根据实际情况可能需要调整多次)。
通过对齐枢轴操作,令父特征的枢轴方向分别与其子特征的枢轴方向一致(该过程根据实际情况可能需要调整多次)。
 在交互式反转运动机构(IK)模式下(确保机械臂各个角色间链接关系正常起作用的状态下),调整机械臂各个角色的位置和旋转方向,创建机械臂的运动动画(创建时,可先调整父角色的位置,再调整子角色的位置),如图8-99所示。
在交互式反转运动机构(IK)模式下(确保机械臂各个角色间链接关系正常起作用的状态下),调整机械臂各个角色的位置和旋转方向,创建机械臂的运动动画(创建时,可先调整父角色的位置,再调整子角色的位置),如图8-99所示。
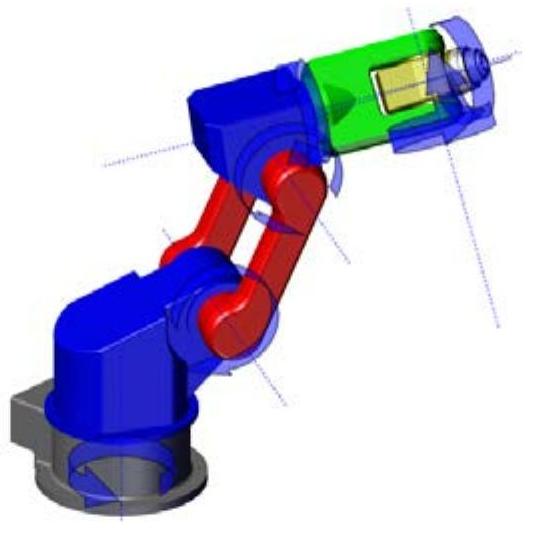
图8-98 设置父子角色间的运动机构链接关系
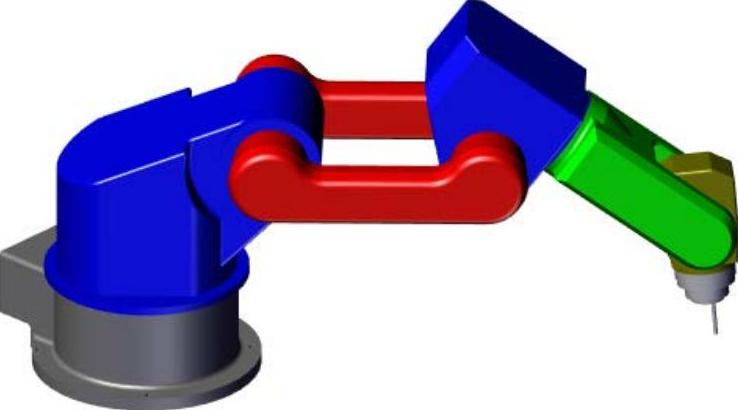
图8-99 创建机械臂运动动画
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





