在Composer中,可以设置子-父链接关系,子角色的位置跟随父角色的位置移动而整体移动,父角色的位置则会受子角色位置的移动而牵连移动,如图8-84所示。子-父链接关系,可以设置角色间类似约束的关系。
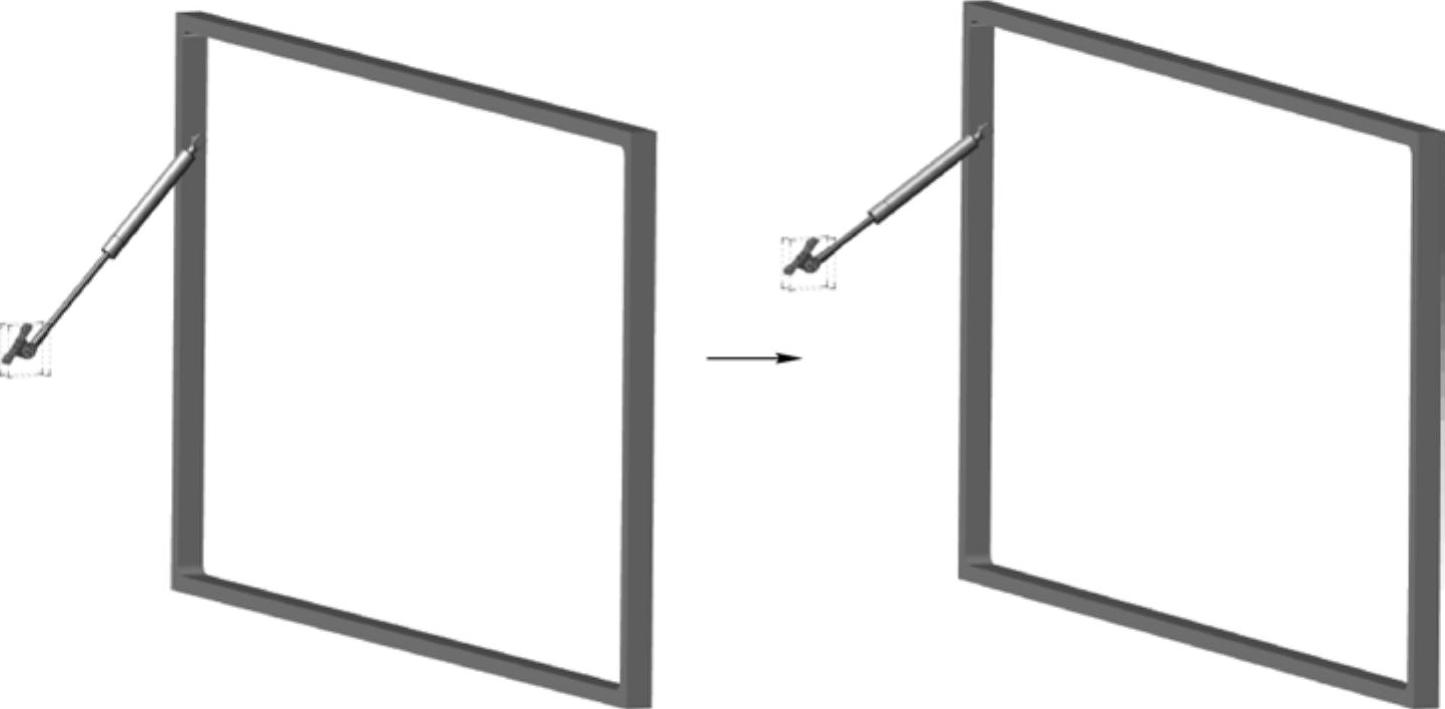
图8-84 通过设置子-父链接关系令角色牵连移动
在Composer中子-父链接关系规定,一个子角色只能有一个父角色,同样一个父角色也应只有一个子角色(该规则可能有误,经验证一个父角色可以有多个子角色)。下面介绍要实现如图8-84所示效果,需要执行的操作。
 打开本书提供的素材文件“窗户装配体.smg”。首先选择“气缸”角色,然后单击“变换”选项卡“运动机构”栏中的“链接”>“链接选定对象到父级对象”按钮,单击“窗框”角色,创建气缸到窗框的子-父链接关系,如图8-85所示。
打开本书提供的素材文件“窗户装配体.smg”。首先选择“气缸”角色,然后单击“变换”选项卡“运动机构”栏中的“链接”>“链接选定对象到父级对象”按钮,单击“窗框”角色,创建气缸到窗框的子-父链接关系,如图8-85所示。
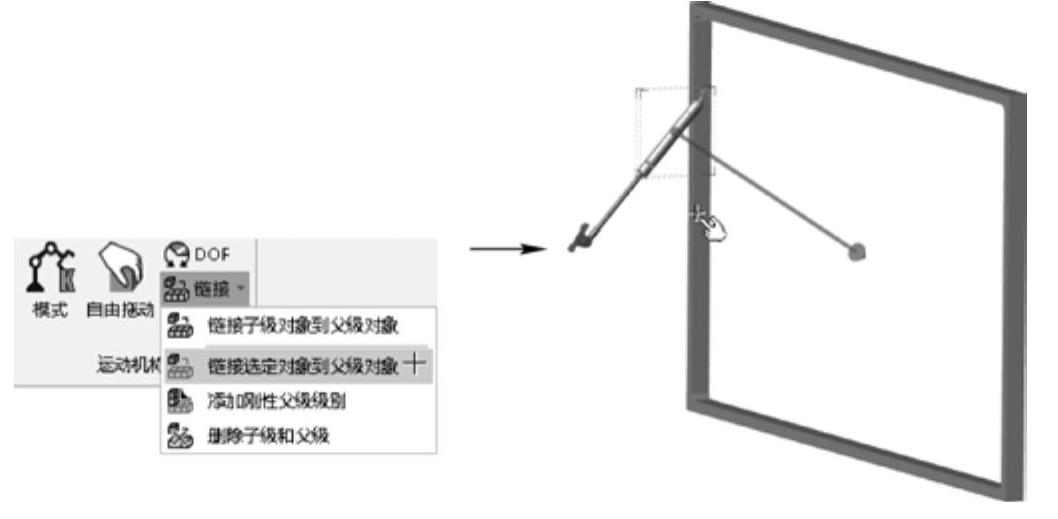
图8-85 创建气缸到窗框的子-父链接关系
 通过相同操作,创建连杆到气缸的子-父链接关系,以及固定头到连杆的子-父链接关系,完成后的装配关系如图8-86所示。
通过相同操作,创建连杆到气缸的子-父链接关系,以及固定头到连杆的子-父链接关系,完成后的装配关系如图8-86所示。
 选择“气缸”角色,在其左侧的“链接类型”下拉列表中选择“枢轴”链接关系,并在“链接轴(在父级中)”下拉列表中选择一个“枢轴”作为旋转方向,如图8-87所示。单击“变换”选项卡“DOF”按钮,可以观察到所设枢轴的旋转方向和旋转位置,观察此时的演示,可发现实际上默认的旋转位置并不符合要求,下面将对此进行调整。
选择“气缸”角色,在其左侧的“链接类型”下拉列表中选择“枢轴”链接关系,并在“链接轴(在父级中)”下拉列表中选择一个“枢轴”作为旋转方向,如图8-87所示。单击“变换”选项卡“DOF”按钮,可以观察到所设枢轴的旋转方向和旋转位置,观察此时的演示,可发现实际上默认的旋转位置并不符合要求,下面将对此进行调整。
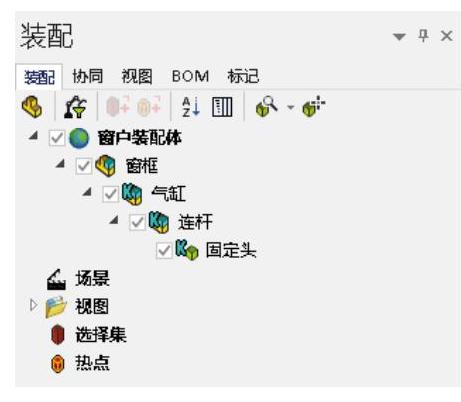
图8-86 所有子-父链接关系
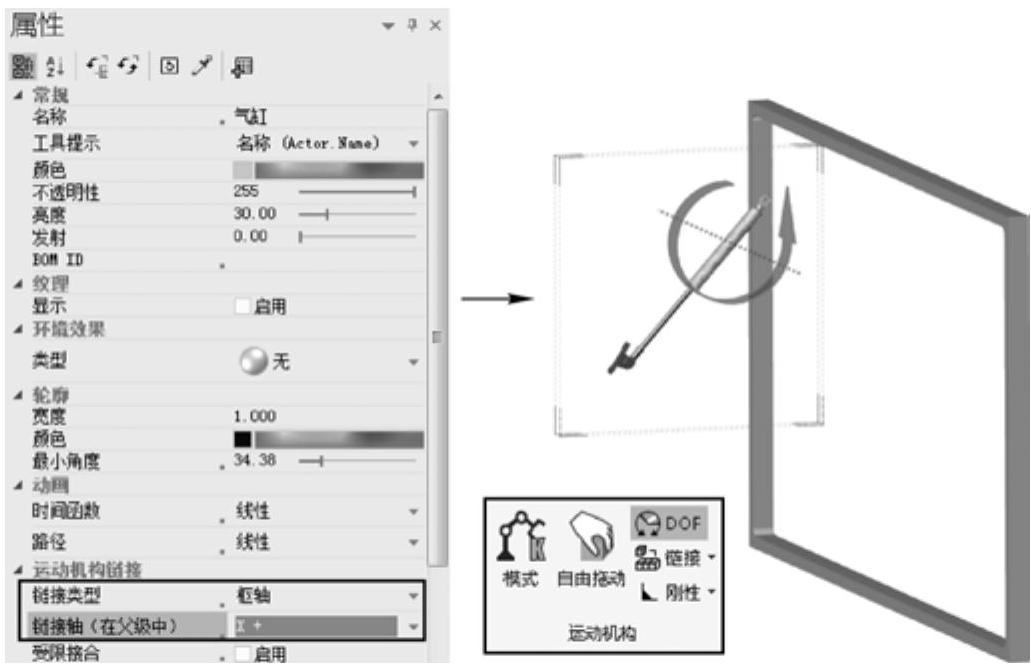
图8-87 设置气缸运动机构链接类型
 单击“变换”选项卡“对齐枢轴”栏中的“设置枢轴”>“在直线/轴上”按钮,然后捕捉父级角色边线(此处“窗框”角色中如图8-88所示的圆柱边线)单击,设置枢轴的位置(如旋转方向不正确,可重新在属性窗格的“链接轴(在父级中)”下拉列表中进行选择),正确的效果如图8-88右图所示。
单击“变换”选项卡“对齐枢轴”栏中的“设置枢轴”>“在直线/轴上”按钮,然后捕捉父级角色边线(此处“窗框”角色中如图8-88所示的圆柱边线)单击,设置枢轴的位置(如旋转方向不正确,可重新在属性窗格的“链接轴(在父级中)”下拉列表中进行选择),正确的效果如图8-88右图所示。
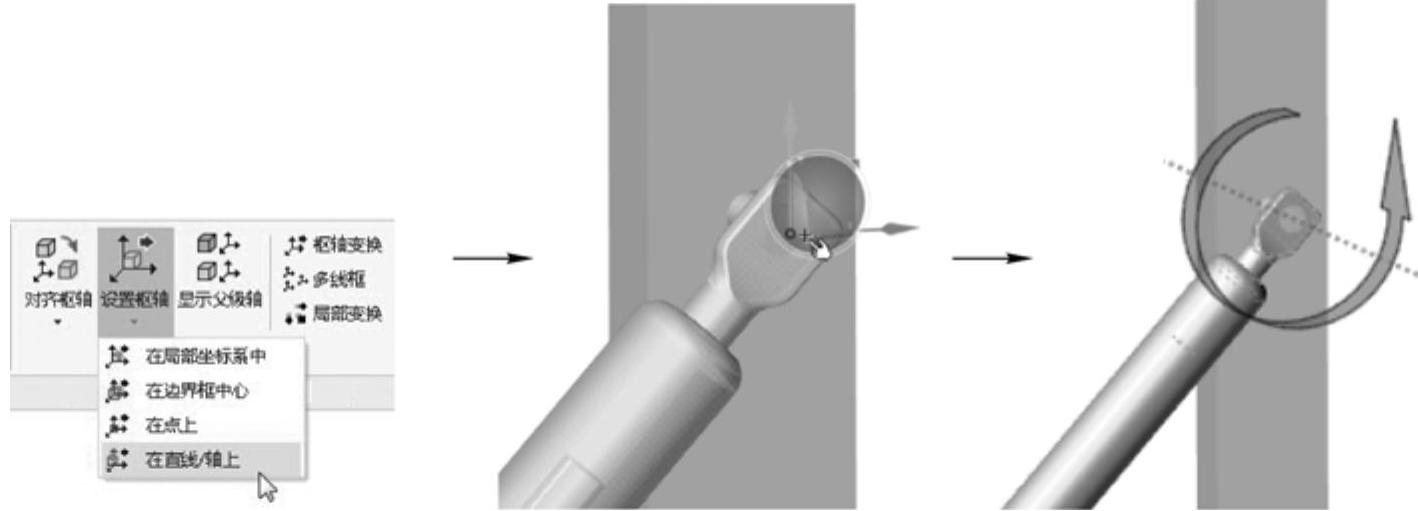
图8-88 调整枢轴位置
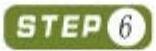
 通过相同操作,创建连杆到气缸的“线性”链接类型,固定头到连杆的“枢轴”链接类型,并需要数次调整枢轴的位置,最终效果如图8-89所示(窗框的链接类型为“刚性”,表示固定不动)。
通过相同操作,创建连杆到气缸的“线性”链接类型,固定头到连杆的“枢轴”链接类型,并需要数次调整枢轴的位置,最终效果如图8-89所示(窗框的链接类型为“刚性”,表示固定不动)。
 通过上述操作,已经定义了角色间的子-父链接关系和运动机构链接关系,很多教程都介绍这样就可以了,但实际上往往不能正常链接,需要继续操作。先选择一个父角色,如气缸角色,然后单击“变换”选项卡“对齐枢轴”栏中的“对齐枢轴”>“对齐选定枢轴”按钮,如图8-90所示,再单击其子特征“连杆”角色,令父特征的枢轴与子特征的枢轴方向相同。
通过上述操作,已经定义了角色间的子-父链接关系和运动机构链接关系,很多教程都介绍这样就可以了,但实际上往往不能正常链接,需要继续操作。先选择一个父角色,如气缸角色,然后单击“变换”选项卡“对齐枢轴”栏中的“对齐枢轴”>“对齐选定枢轴”按钮,如图8-90所示,再单击其子特征“连杆”角色,令父特征的枢轴与子特征的枢轴方向相同。
 通过与步骤6相同的操作,令所有父特征的枢轴对齐子特征的枢轴(在实际操作时可根据不同情况,在使用链接关系调整模型,模型发生不按设置移动的情况时,即需要执行此操作)。
通过与步骤6相同的操作,令所有父特征的枢轴对齐子特征的枢轴(在实际操作时可根据不同情况,在使用链接关系调整模型,模型发生不按设置移动的情况时,即需要执行此操作)。
提示(www.daowen.com)
之所以要执行对齐枢轴的操作,是因为Composer规定了子-父关系链中的所有枢轴必须以相同的方向对齐,否则会出现不可控的错误。这点非常重要,如不对齐枢轴,很多链接在操作时都会出现错误。
 测试所添加的链接。单击“变换”选项卡“运动机构”栏中的“模式”和“自由拖动”按钮,如图8-91所示,然后选择“固定头”拖动一下试试,再选择“连杆”拖动一下,看看有什么不同。
测试所添加的链接。单击“变换”选项卡“运动机构”栏中的“模式”和“自由拖动”按钮,如图8-91所示,然后选择“固定头”拖动一下试试,再选择“连杆”拖动一下,看看有什么不同。
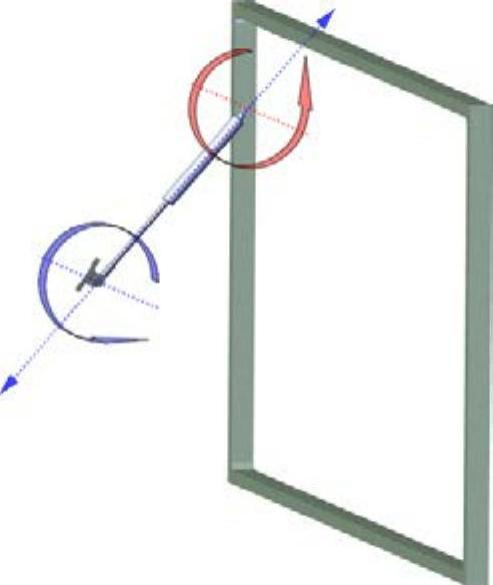
图8-89 设置所有链接类型效果
图8-90 对齐枢轴
图8-91 交互式拖动模型
提示
需要注意的是,通过添加父子间的链接关系,并不能模拟SolidWorks中的所有约束关系(如很多连杆结构,发动机的气缸运作等都不可以直接模拟,因为Composer不能回调的子-父关系,不能构成闭环),所以读者没有必要在这方面多费心思。
也可以这样理解,Composer归根到底是一个以帧频设置为基础的动画制作软件(而不是以模型间约束关系为基础),定义每一帧的模型状态,然后通过计算机自动补间的方式完成动画的创建。
下面解释一下“变换”选项卡中部分按钮的作用:
 “模式”按钮
“模式”按钮 :选中该按钮时,表示启用交互式反转运动机构(IK)模式,此时所有变换都考虑运动机构链接。
:选中该按钮时,表示启用交互式反转运动机构(IK)模式,此时所有变换都考虑运动机构链接。
 “DOF”按钮:也称“显示/隐藏自由度”按钮,选中该按钮,可以显示运动机构链接针对选定角色所允许的自由度(DOF)。当没有选择任何对象时,显示所有角色的自由度。
“DOF”按钮:也称“显示/隐藏自由度”按钮,选中该按钮,可以显示运动机构链接针对选定角色所允许的自由度(DOF)。当没有选择任何对象时,显示所有角色的自由度。
 “链接”系列按钮
“链接”系列按钮 :用于设置子-父间的链接关系,较易理解,这里仅解释一下“添加刚性父级级别”按钮,该按钮用于设置向父级添加刚性父链接(当无法将父对象和子对象的坐标系对齐时,可添加刚性父链接)。
:用于设置子-父间的链接关系,较易理解,这里仅解释一下“添加刚性父级级别”按钮,该按钮用于设置向父级添加刚性父链接(当无法将父对象和子对象的坐标系对齐时,可添加刚性父链接)。
 “对齐枢轴”系列按钮
“对齐枢轴”系列按钮 :用于在两个角色间对齐枢轴的方向。
:用于在两个角色间对齐枢轴的方向。
 “设置枢轴”系列按钮
“设置枢轴”系列按钮 :用于设置角色枢轴的原点位置(通常也会顺带设置枢轴的方向)。
:用于设置角色枢轴的原点位置(通常也会顺带设置枢轴的方向)。
知识
在实际创建动画的过程中,由于父-子链接关系不能满足所有要求,所以往往还会用到“变换”选项卡的“对齐”系列按钮 。这些按钮可令两个角色,点对齐、点面对齐、面对齐等,在创建动画的过程中按需要选择使用即可。
。这些按钮可令两个角色,点对齐、点面对齐、面对齐等,在创建动画的过程中按需要选择使用即可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






