本实例将学习以下内容:
● 建立标记点并在标记点之间建立失效状态的固定副。
● 定义传感器,在两个标记点距离靠近至重叠时,激活固定副。
● 通过Templex工具创建仿真脚本。
在练习开始前,首先将目录chap07下的Sequential_Simulation.mdl文件复制到工作文件夹中。
STEP 01 创建铰链、标志点和传感器
(1)新建一个MotionView会话。
(2)在标准工具栏中单击Open Model按钮
 ,或在下拉菜单中选择Open→Model命令,打开工作文件夹下的Sequential_Simulation.mdl文件。该模型中包含Slider和Picker的两个几何体。为了完成本节的练习,还需要在模型中创建铰、标记点和传感器,并使用Templex创建仿真脚本。Slider-Picker模型如图7-4所示。
,或在下拉菜单中选择Open→Model命令,打开工作文件夹下的Sequential_Simulation.mdl文件。该模型中包含Slider和Picker的两个几何体。为了完成本节的练习,还需要在模型中创建铰、标记点和传感器,并使用Templex创建仿真脚本。Slider-Picker模型如图7-4所示。

图7-4 Slider-Picker模型
(3)在模型浏览树中右击The Model,选择Add Constraint→Joint命令,在Type中选择Translational Joint,指定标题(Label)为Slider Trans。
(4)在Joint面板中选择slider作为Body 1,选择Ground Body作为Body 2,指定slider cg为Origin,并通过slide end点定义该平移铰的方向,如图7-5所示。

图7-5 Joint面板(平移铰)
(5)使用类似的方法,在模型中创建另一铰链。该铰的类型为固定铰(fixed joint),指定标题为picker rest fix。
(6)在Joint面板中,选择picker作为Body 1,选择Ground Body作为Body 2,指定part fix为Origin,如图7-6所示。
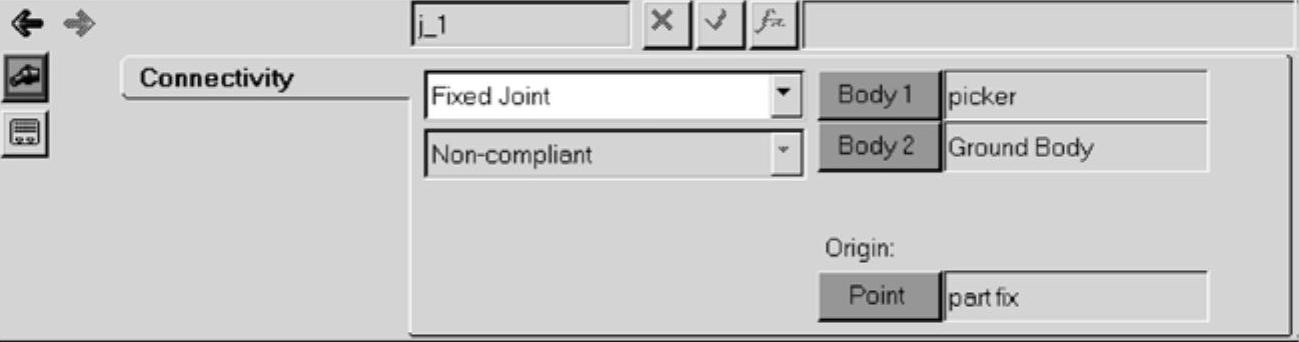
图7-6 Joint面板(固定铰)
在完成了Slider和Ground Body之间固定铰定义后,还需要在模型中定义两个标记点,这两个标记点分别与模型中的两个几何体相关联,且在初始状态下不重叠。在仿真求解的过程中,随着这两个几何体的相对运动,标记点逐渐靠近直至重合,重合的瞬间,两个标记点之间的虚拟固定铰将被激活,从而使用虚拟固定铰将两个物体连接在一起。注意,此类铰的定义无法在MotionView界面中完成,需要使用Templex对其进行定义。
(7)在模型浏览树中右击The Model,选择Add Reference Entity→Marker命令,或右击Marker按钮 ,新建标题为Marker Slider Track的标记点,并按图7-7所示的内容指定Marker相关参数。
,新建标题为Marker Slider Track的标记点,并按图7-7所示的内容指定Marker相关参数。

图7-7 Marker面板(步骤7)
(8)使用类似的方式,建立标题为Marker Picker Track的标记点,并按图7-8所示的内容指定Marker相关参数。

图7-8 Marker面板(步骤8)
(9)在模型浏览树中右击The Model,选择Add Control Entity→Sensor命令,或在工具栏中右击Sensor按钮 ,使用默认标题与变量名,新建一个传感器。
,使用默认标题与变量名,新建一个传感器。
(10)在Signal一栏中,将Sensor的类型设置为表达式Expression类型。
(11)激活Expression文本框后,单击按钮 ,进入表达式编辑器。
,进入表达式编辑器。
(12)将光标置于“`”符号内,然后进入Motion标签,单击DM按钮,此时文本框将填入DM函数。
(13)进入Properties标签,单击Markers文件夹,展开Marker Slider Track内容,然后单击idstring将其添加到文本框中。
(14)类似地,将Marker Picker Track的idstring添加到文本框中,完整的表达式如下:

该表达式将测量m_0和m_1之间的距离,这里使用标记点的编号来引用标记。m_0和m_1分别是步骤(5)和步骤(6)创建的标记点的变量名。
(15)单击OK按钮,返回传感器面板。
(16)在Compare to一栏的Value中填入0.0010,在Error一栏中输入0.0010。将Respond if设置为Abs(Signal)is less than or equal to VALUE+ERROR。
(17)在Response一栏中,激活Return to Command File选项。
在求解过程中,如果达到传感器的触发条件,则求解将中断并回到脚本文件。
(18)在模型浏览树中右击The Model,选择Add Constraint→Motion命令,或右击工具栏中Motion按钮 ,使用默认的标题与变量名创建驱动。
,使用默认的标题与变量名创建驱动。
(19)根据图7-9所示的内容定义驱动。(www.daowen.com)
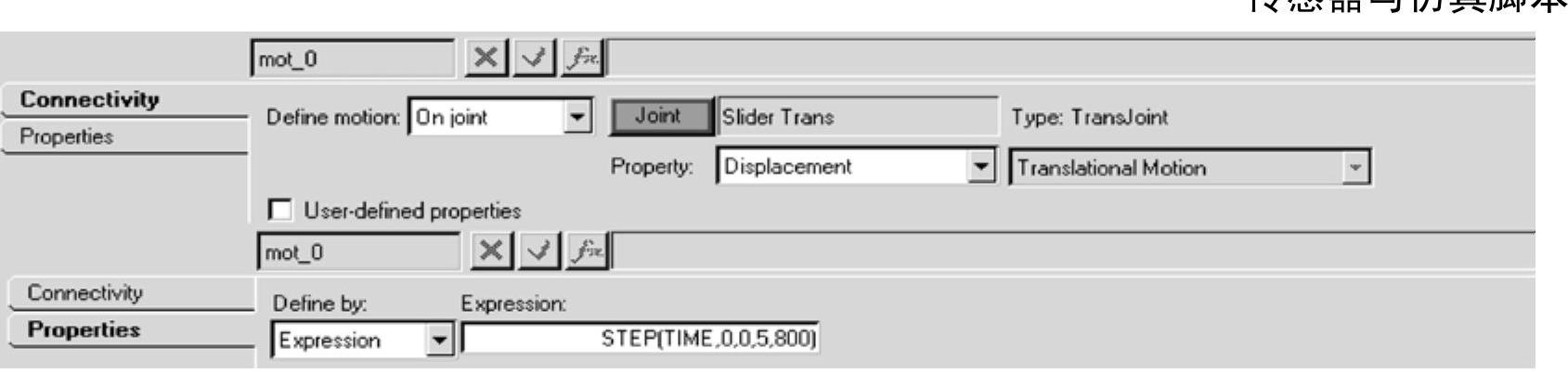
图7-9 Motion面板
STEP 02 通过Templex工具,在两个标记点间建立虚拟固定铰
在这一步中将在两个标记点之间建立虚拟固定铰。该铰在初始状态下处于失效状态,当且仅当两个标记点的距离在运动过程中变为0时,该铰方被激活。
(1)在模型浏览树中右击The Model,选择Add General MDL Entity→Template命令,或在工具栏中右击Template按钮 。
。
(2)在Label中输入Fixed Joint Defn,创建虚拟固定铰。
(3)在Template面板中的Type下拉列表中,选择Write text to solver input deck。输入以下文本,注意文本格式和语序:
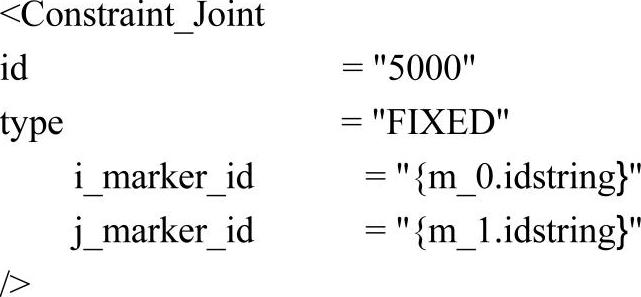
(4)输入完毕后,该面板的形式应如图7-10所示。

图7-10 定义虚拟固定铰
STEP 03 通过Templex工具,定义序列求解脚本
在这一步中,将定义序列求解脚本:
● 定义输出结果请求。
● 在初始状态下,将两个标记点之间的虚拟固定铰设置为失效状态。
● 进行3.5s的瞬态分析。
● 当两个标记点(Slider和Picker)重合时,激活虚拟固定铰。
● 失效Picker和Ground之间的固定铰。
● 失效已经完成功能的传感器单元。
● 再进行5s的瞬态分析。
(1)在模型浏览树中右击The Model,选择Add General MDL Entity→Template命令,或在工具栏中右击Template按钮 ,使用默认标题与变量名创建脚本。
,使用默认标题与变量名创建脚本。
(2)在Template面板中的Type下拉列表中,选择Write text to solver command file。
(3)在Template编辑窗口中,输入以下语句:


STEP 04 递交求解并进行结果后处理
(1)单击Run按钮 ,进入Run面板。
,进入Run面板。
(2)选中Export MDL snapshot,可保存当前会话中的MDL模型。
(3)单击Save As栏的“文件浏览”按钮 ,为输出文件命名。
,为输出文件命名。
(4)在Simulation Parameter标签中,将计算终止时间End Time设置为5,并定义Print Interval为0.01。
(5)在Transient标签中,将积分类型Intergrator type设置为DSTIFF。
(6)返回Main标签,单击Run按钮。
(7)求解结束后,单击Main标签中的Animate按钮进入HyperView后处理界面。
(8)单击“动画播放”按钮 和“停止播放”按钮
和“停止播放”按钮 ,查看机构运动状态,如图7-11所示。
,查看机构运动状态,如图7-11所示。
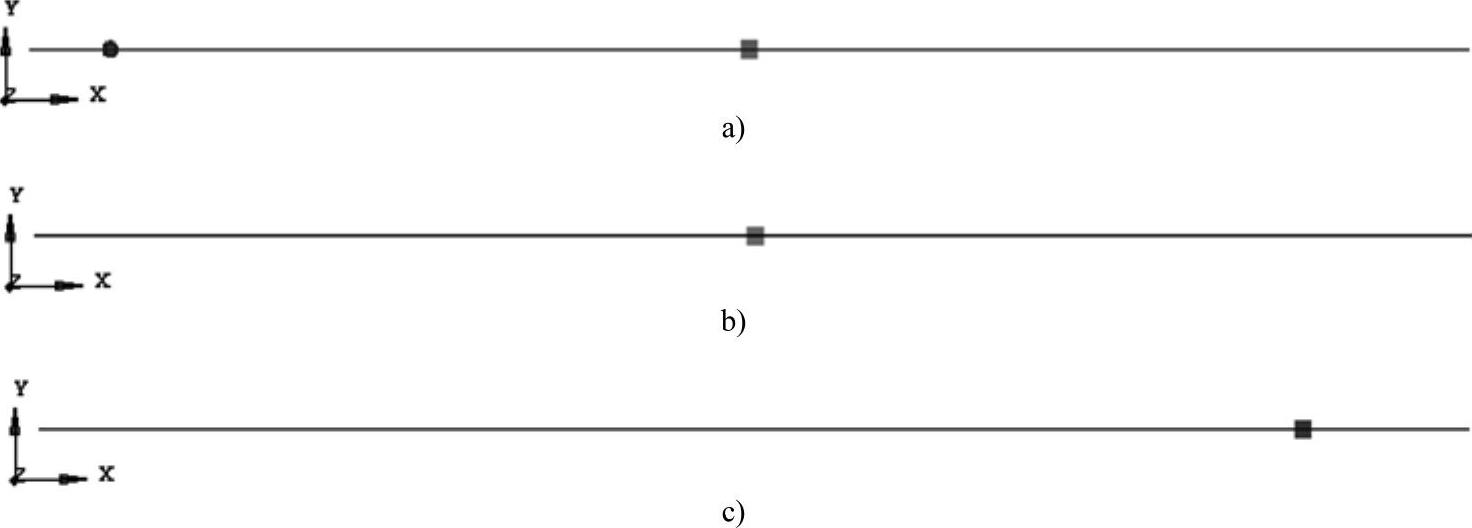
图7-11 机构运动状态
a)初始时刻 b)Slider和Picker重合 c)Slider和Picker一起运动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







