本示例将学习以下内容:
●输入HM格式装配体到MotionView。
●定义约束。
●应用MotionSolve进行瞬态分析。
●应用HyperView查看仿真结果。
本示例将模拟一个确动凸轮机构的运动过程。在该机构中,五边形转子的转动将转换为滑条的平动。确动凸轮机构模型如图3-33所示。

图3-33 确动凸轮机构模型
练习开始前,复制chap03目录下的for_contact_tutorial.hm文件到工作文件夹中。
STEP 01 输入HM模型
(1)新建一个MotionView会话。
(2)从File下拉菜单中选择Import→Geometry命令,弹出Import CAD or FE对话框。
(3)将Import Options设置为Import CAD or Finite Element Model With Mass and Inertias。
(4)将Input File类型切换成HyperMesh,单击其后的“文件浏览”按钮 ,选择并打开工作文件夹下的for_contact_tutorial.hm模型。
,选择并打开工作文件夹下的for_contact_tutorial.hm模型。
(5)指定Output Graphic File到工作路径。
(6)如图3-34所示,展开Meshing Options for Surface Data,选中Allow HyperMesh to specify mesh options单选按钮,并选中Launch HyperMesh to create MDL points复选框。该选项可激活HyperMesh,并在HyperMesh界面中指定节点作为MDL几何点。
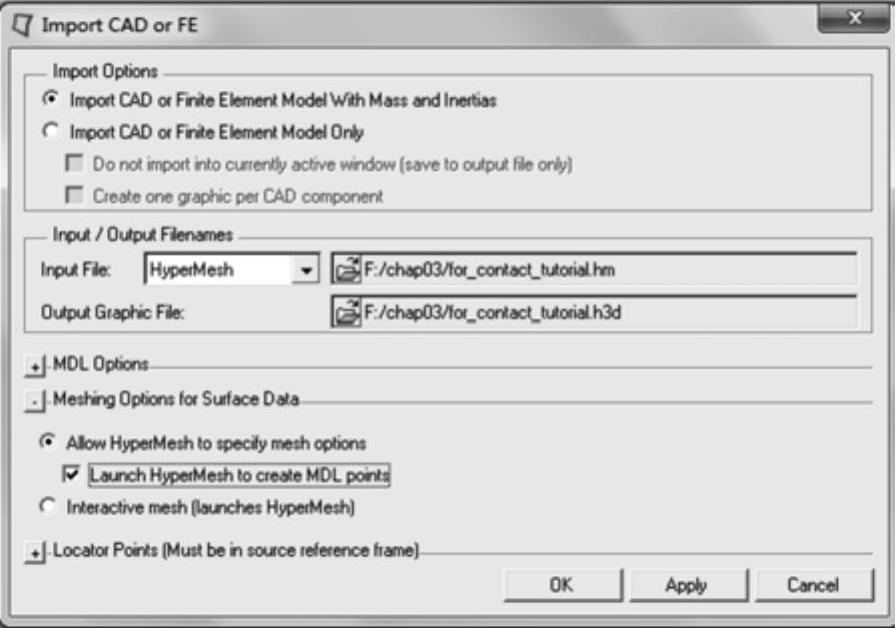
图3-34 Import CAD or FE对话框
(7)单击OK按钮,进行模型转换。此时将启动HyperMesh,并自动加载for_contact_tutorial.hm模型。
(8)进入HyperMesh,单击模型浏览树区域的Mask标签。HyperMesh中的确动机构模型如图3-35所示。

图3-35 HyperMesh中的确动机构模型
(9)单击Elements文件夹下2D、3D子文件夹处的“-”,隐藏图形区的所有单元。
此时,图形区仅显示黄色的节点。这些节点是自定义的,用于MotionView建模时定义约束和加载的辅助点。
(10)按住<Shift>键,拖动鼠标左键框选所有节点。
(11)单击Mask标签中Elements文件夹下2D、3D子文件夹处的“+”,显示图形区所有单元。此步若缺失,MotionView模型输入工具将无法转换HyperMesh模型。
(12)单击proceed按钮。
(13)在弹出的Import FE对话框中使用默认设置,单击OK按钮。此时弹出输入成功提示对话框,单击“确定”按钮,并关闭软件处理日志窗口,如图3-36所示。
(14)进入MotionView界面,Motion View中的确动机构模型如图3-37所示。

图3-36 提示对话框

图3-37 MotionView中的确动机构模型
(15)进入MotionView模型浏览树,查看自动创建的Points、Graphics和Bodies。
注:如果在Import CAD or FE对话框中的Meshing Options for Surface Data处选择interactive mesh,则可以在HyperMesh中对模型网格重新编辑。对于参与接触的物体表面,高质量的网格将有助于获得高精度的仿真结果;对于不参与接触的物体,可以粗化其网格,以降低转换的H3D图形文件的规模。
在本示例中,零件的质量、转动惯量、质心等信息将自动计算。如果待转换的模型文件中没有材料数据(如hm模型没有正确定义Material和Property卡片),那么转换后的H3D文件中将不包含这些信息。这种情况下,用户需要手动输入上述信息。
STEP 02 简化和整理模型
展开模型浏览树的Graphics文件夹,分别单击Master和Slave,可以看到这两个图形是机构中参与接触物体的表面。之所以定义表面图形,是为了减少接触计算的几何特征,以提高接触约束的稳定性。这里将Master和Slave分别关联到Circle和Pentagon体上,并将其原始关联的几何体删除。
(1)单击Master,进入Graphic面板。
(2)在Connectivity标签中双击Body按钮,在弹出的Select a Body对话框中选择Pentagon,如图3-38所示。
(3)单击OK按钮。

图3-38 Graphic面板(步骤3)
(4)类似地,将Slave与Circle体关联,如图3-39所示。

图3-39 Graphic面板(步骤4)
(5)在模型浏览树中展开Bodies文件夹,选择Master和Slave,右击删除这两个体。
(6)在模型浏览树中展开Points文件夹,可以看到除自动计算的质心点外,还有通过HyperMesh选择创建的几何点。为便于后续定义,这里修改几何点名称以提高其可读性。
(7)根据表3-9修改几何点名称。如果几何点没有编号,可选择Tools→Check Model命令为其赋加编号。
表3-9 几何点信息

几何点重命名操作可通过以下任一种方式实现:
1)在模型浏览树中,右击待编辑的几何点,在弹出的快捷菜单中选择Rename,如图3-40所示。
2)单击Point面板的Entity Note按钮 ,在弹出的Point or PointPair Info对话框中修改Label,如图3-41所示。
,在弹出的Point or PointPair Info对话框中修改Label,如图3-41所示。
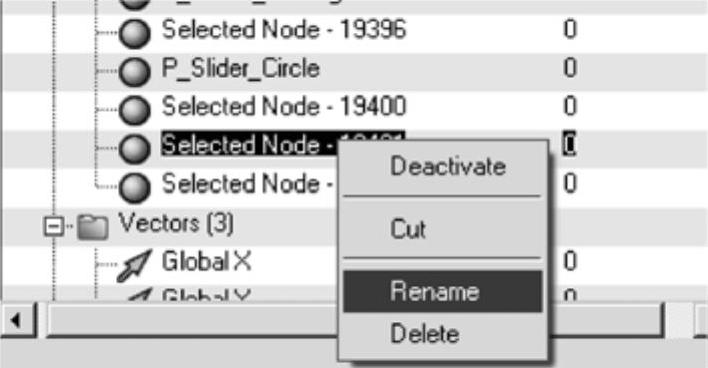
图3-40 点重命名

图3-41 Point or PointPair Info对话框
STEP 03 添加约束副
本步骤将为模型添加约束副,表3-10列出了需要添加的约束副类型及连接关系。
表3-10 约束副类型及连接关系
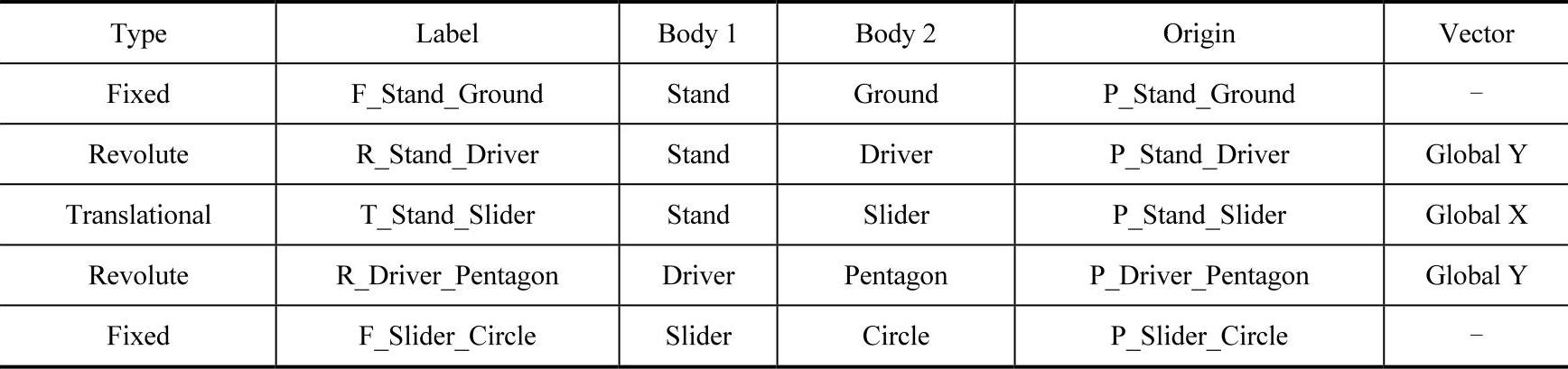
(1)右击Joint按钮 ,在弹出的Add Joint or JointPair对话框中指定Label为F_Stand_Ground,使用默认的变量名,切换铰类型为Fixed Joint,单击OK按钮。
,在弹出的Add Joint or JointPair对话框中指定Label为F_Stand_Ground,使用默认的变量名,切换铰类型为Fixed Joint,单击OK按钮。
(2)在Joint面板中双击Body1按钮,在弹出的Select a Body对话框中选择Stand。(www.daowen.com)
(3)双击Body2按钮,在弹出的Select a Body对话框中选择Ground Body。
(4)双击Point按钮,在弹出的Select a Point对话框中选择P_Stand_Ground。
(5)用同样的方法,按照表3-10创建余下约束副。
STEP 04 创建运动驱动
(1)右击Motion按钮 ,在弹出的Add Motion or MotionPair对话框中使用默认的名称与变量名,单击OK按钮。
,在弹出的Add Motion or MotionPair对话框中使用默认的名称与变量名,单击OK按钮。
(2)在Motion面板中双击Joint按钮,在弹出的Select a Joint对话框中选择R_Stand_Driver,指定Property为Velocity,如图3-42所示。

图3-42 Motion面板
(3)进入Properties标签,使用Linear方式定义驱动函数,在Value文本框中输入1.0。
STEP 05 创建接触约束
(1)右击工具栏中的Contact按钮 ,在弹出的Add Contact对话框中使用默认的名称与变量名,单击OK按钮。
,在弹出的Add Contact对话框中使用默认的名称与变量名,单击OK按钮。
(2)在Contact面板中双击Body I按钮,在弹出的Select a Body对话框中选择 Pentagon,单击OK按钮。
(3)在Body1下的Graphic选项区选中Master Graphic。
(4)Graphic选项区用于指定参与接触的几何特征。这里仅选择五边形零件的外轮廓曲面,可以提高接触约束的稳定性以及结果精度。
(5)双击Body J按钮,在弹出的Select a Body对话框中选择Circle,单击OK按钮。
(6)在BodyJ下的Graphic选项区选中Slave Graphic,如图3-43所示。

图3-43 Contact面板(Connectivity标签)
(7)进入Properties标签,根据图3-44所示的内容设置接触约束属性。

图3-44 Contact面板(Properties标签)
STEP 06 定义输出
(1)右击工具栏中的Output按钮 ,在弹出的Add Output对话框中使用默认的名称与变量名,单击OK按钮。
,在弹出的Add Output对话框中使用默认的名称与变量名,单击OK按钮。
(2)选择结果输出类型为Force,将输出对象设置为Joint。
(3)双击Joint按钮,在弹出的Select a Joint对话框中选择R_Stand_Driver,单击OK按钮。
此步将输出旋转副R_Stand_Driver上的约束反力。接下来再创建一个输出请求,用于输出Pentagon与Circle之间的接触力。
(4)右击工具栏中的Output按钮 ,在弹出的Add Output对话框中使用默认的名称与变量名,单击OK按钮。
,在弹出的Add Output对话框中使用默认的名称与变量名,单击OK按钮。
(5)选择结果输出类型为Expressions。
(6)单击F2处的文本框,此时将激活fx按钮。
(7)单击fx按钮,进入表达式编辑器。
(8)在表达式编辑器的文本框中输入以下表达式:
'CONTACT({con_0.idstring},0,1,0)'
其中,con_0为Pentagon与Circle之间接触约束的变量名。
CONTACT函数语法如下:CONTACT(id,jflag,comp,rm)
其中,id为接触约束副的编号;jflag用于指定接触对中的I物体或J物体接触力或接触力矩输出;comp表示定义的输出结果分量,1、2、3、4分别表示接触力的合值、X轴分量、Y轴分量和Z轴分量,5、6、7、8分别表示接触力矩的合值、X轴分量、Y轴分量和Z轴分量;rm表示输出结果所参考的坐标系,O表示全局坐标系。
(9)单击OK按钮。
STEP 07 求解模型
(1)选择File→Save→Model命令,保存模型为for_contact_tutorial.mdl。
(2)单击工具栏中的Run按钮 ,进入Run面板。
,进入Run面板。
(3)在Main标签中单击Save as区域的“文件浏览器”按钮 ,指定求解模型的名称(for_contact_tutorial.xml)与存放路径。
,指定求解模型的名称(for_contact_tutorial.xml)与存放路径。
(4)进入Simulation Parameters标签,指定End time为8.0,使用默认的结果输出间隔。
(5)进入Transient标签,将Integrator type切换成VSTIFF,分别指定Integration tolerance和Max stepsize为0.0001和0.001。
(6)返回Main标签,单击Run按钮,求解模型。
STEP 08 查看结果
(1)求解结束后,Animate和Plot按钮被激活,如图3-45所示。

图3-45 Run面板
(2)单击Animate按钮,将载入第二个窗口(HyperView),并自动加载动画结果。
(3)单击工具栏中的Start/Pause Animation按钮 ,播放动画。
,播放动画。
(4)再次单击Start/Pause Animation按钮 ,停止播放。
,停止播放。
(5)单击Plot按钮,此时将在同一页面中载入第三个窗口(HyperGraph),并自动加载数据结果。
(6)根据图3-46所示的内容输出旋转副约束反力曲线。

图3-46 约束反力曲线输出
(7)根据图3-47所示的内容输出接触力曲线。

图3-47 接触力曲线输出
(8)仿真结果如图3-48所示。

图3-48 仿真结果
(9)从File下拉菜单中选择Save→Session命令,保存会话。
(10)选择File→Exit命令,关闭会话。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







