一个系统通常是由多个构件组成的,各个构件之间通常存在约束关系,即一个构件限制另一个构件的运动。两个构件间的这种约束关系,通常称为运动副或铰。MotionView提供了多种约束关系,主要分为以下4类。
(1)基本约束。
基本约束是一种抽象的运动副,通过基本约束的组合可以得到更复杂的约束。基本约束可以组合成常用的铰约束,如平行约束与点重合约束可以组合成旋转铰。基本约束在特定的场合有特殊用途。例如,一个系统完全使用铰约束定义,往往会造成过约束,此时可以使用一定量的基本约束来替代铰,避免过约束。MotionView提供的基本约束有点线约束(Inline)、点面约束(Inplane)、方向约束(Orientation)、平行约束(Parallel Axes)、垂直约束(Perpendicular)等。
(2)铰约束。
MotionView提供的球铰有铰(Ball)、旋转铰(Revolute)、平移铰(Translational)、固定铰(Fixed)、虎克铰(Hooke)、万向节(Universal)、常速度铰(Constant Velocity)、圆柱铰(Cylindrical)、齿轮铰(Gear)等。
(3)高副约束。
高副相对低副而言,是一种点接触约束,即限制一个构件上的一个点在另一个构件上的一条曲线或曲面上移动,不能分离。这里的曲线可以是平面曲线或空间曲线,可以封闭也可以开放,可以是固定曲线也可以是变形曲线;曲面可以是刚性曲面或变形曲面。MotionView提供的高副约束有曲线-曲线约束(Curve To Curve)、点-曲线约束(Point To Curve)、点-曲面(Point To Surface)、曲线-曲面(Curve To Surface)、曲面-曲面(Surface To Surface)、点-变形曲线(Point To DeformableCurve)、点-变形曲面(Point To DeformableSurface)等。
(4)驱动约束。
驱动也是一种约束,这种约束是时间的函数。按驱动加在对象类型上分有点驱动(施加在Marker上)和铰驱动(施加在铰上);按驱动特点区分有平移驱动和旋转驱动。
MotionView提供了便捷的约束建模工具,表2-7描述了工具栏中各约束建模按钮的基本功能。
表2-7 约束建模按钮

约束建模面板还可通过下拉菜单及项目浏览树打开,如图2-54所示。
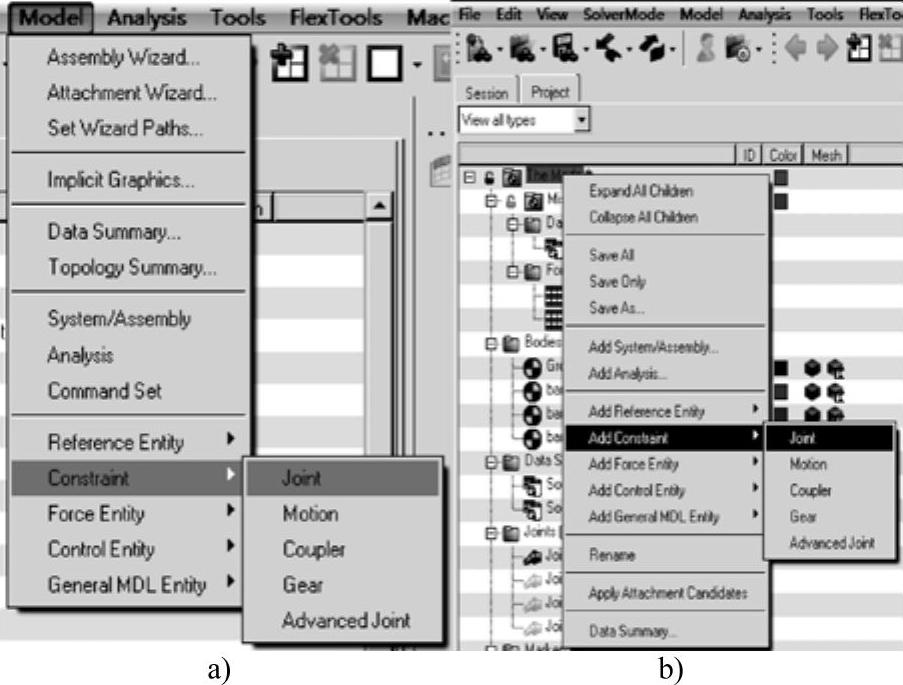
图2-54 约束建模面板打开方式
a)下拉菜单 b)项目浏览树
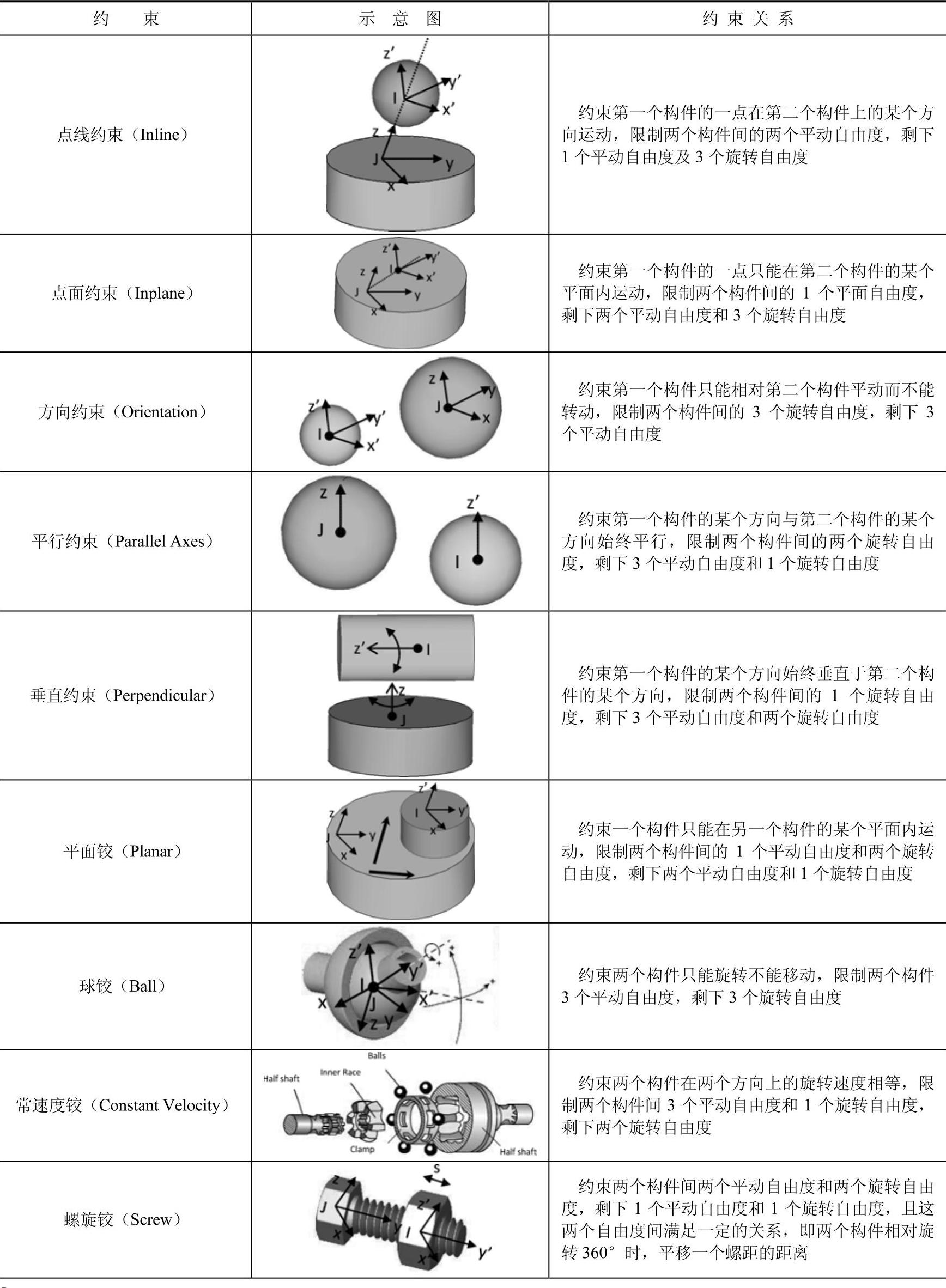
表2-8 列出了不同类型约束的约束关系。
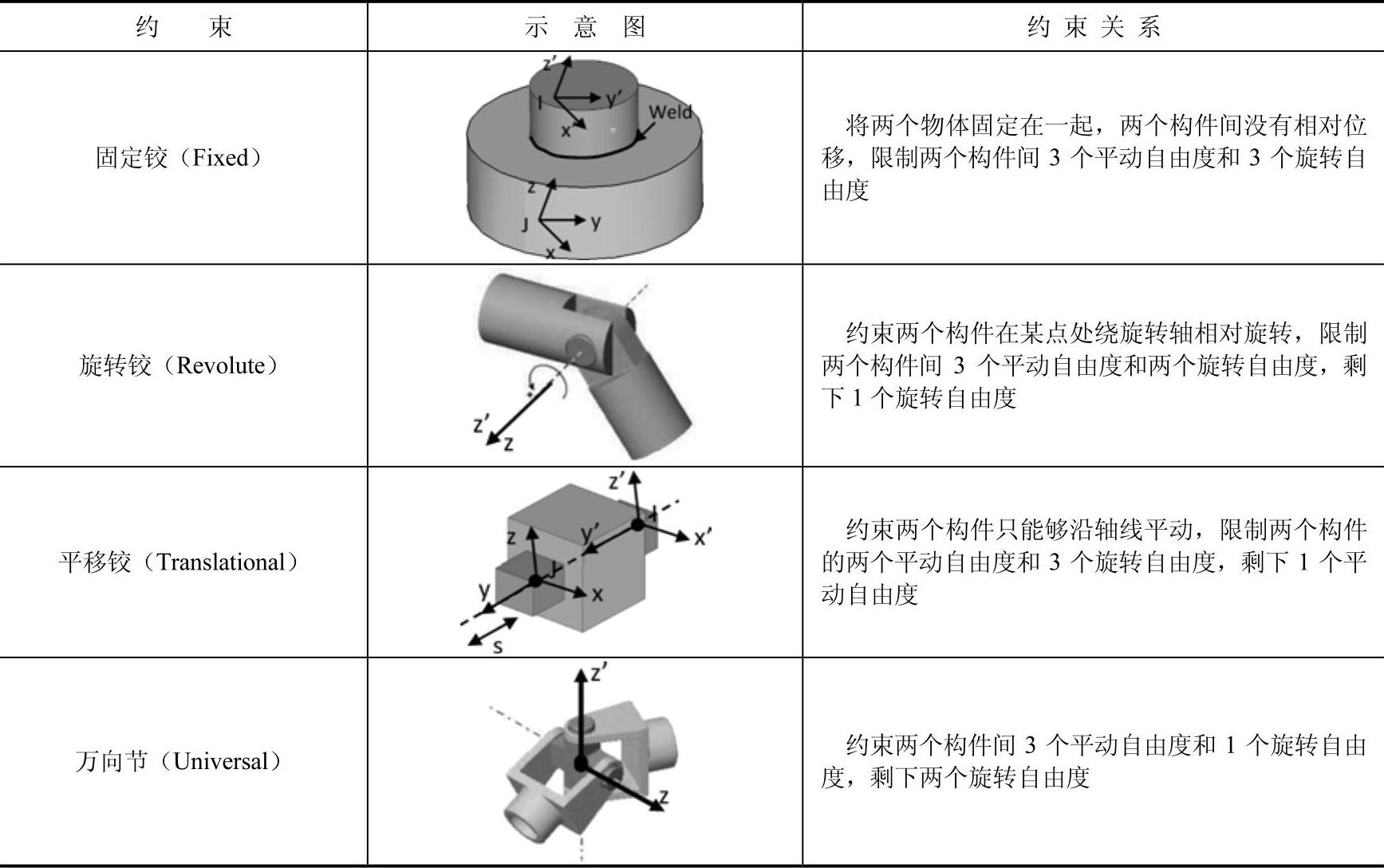
表2-8 MotionView约束副的约束关系
(续)
下面介绍铰的创建和驱动的创建:
(1)铰的创建。
Joint面板用于创建和编辑铰对象,如图2-55所示。MotionView中铰分为刚性铰(Non- compliant joints)和柔性铰(Compliant Joints)两类。
刚性铰指一般铰约束,仅具有该类型铰特定的自由度。对于刚性铰,铰面板包含连接(Connectivity)和初始条件(Initial Conditions)两个标签。连接标签用于定义铰的连接对象、位置及指向等参数,初始条件标签用于定义铰的运动初始条件,如初位移、初速等。(www.daowen.com)

图2-55 铰面板
柔性铰与衬套类似,具有6个自由度。使用该类型铰连接的物体间的相对运动取决于柔性铰的刚度和阻尼系数。使用连接标签中的Allow compliance选项可将刚性铰转换为柔性铰。柔性铰面板上除了连接和初始条件标签外,还包括平动刚度系数(Trans Stiffness)、转动刚度系数(Rot Stiffness)、平动阻尼系数(Trans Damping)、转动阻尼系数(Rot Damping)和预载(Preload)标签。另外,连接面板上的Symmetric properties选项可用来定义对称的铰约束,User-defined选项支持用户自定义程序定义的非线性刚度系数和阻尼系数。
创建了铰后,铰关联的两个构件上将分别固定一个标记点,第一个构件的标记点称为I-Marker,第二个构件上的标记点称为J-Marker。这两个标记点用于建立铰的约束方程,通过这两个标记点可以计算两个构件间的相对位移、速度、加速度以及作用在两个构件上的约束反力和力矩。
接下来以旋转副为例说明铰的创建过程,假定会话中已创建四杆构件,如图2-56所示。
1)右键单击工具栏中的Joint按钮 ,在弹出的Add Joint or JointPair对话框中使用默认的标题与变量名,选择铰类型为Revolute Joint。
,在弹出的Add Joint or JointPair对话框中使用默认的标题与变量名,选择铰类型为Revolute Joint。
2)单击OK按钮,进入Joint面板。
3)单击Body1按钮,在图形区选择bar1。
4)单击Body2按钮,在图形区单击坐标系,选择Ground Body。

图2-56 四杆构件
5)在Origin处单击Point按钮,选择图形区bar11几何点。
6)在Alignment axis处指定铰约束方向类型为Vector,在图形区选择坐标系Z轴。Joint面板如图2-57所示。创建的旋转铰如图2-58所示。

图2-57 Joint面板(Revolute Joint)
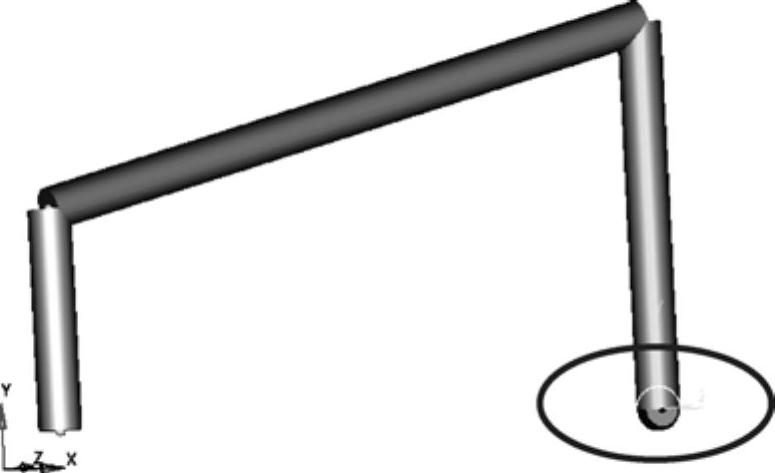
图2-58 四杆构件与旋转铰
(2)驱动的创建。
Motion面板用于驱动约束的创建和编辑,如图2-59所示。

图2-59 Motion面板
MotionView支持铰驱动与标记点驱动两种类型的驱动。指定铰约束后,MotionView会自动辨别施加线驱动(线位移、线速度或线加速度)还是角驱动(角位移、角速度或角加速度)。如果使用标记点驱动,则需指定驱动作用的标记点。由于标记点均从属于几何体,因此标记点驱动也就是间接驱动几何体。属性标签可以指定驱动的大小,MotionView支持恒值、曲线和表达式3种定义方式。
注:进行位移驱动时,建议写成`Value*time`的表达式形式。如果使用Value的恒值形式,则求解器会将此当做一个强制约束而报错。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





