在现有的三维视线估计方法中,要么需要关于用户眼球参数的独立信息,要么需要至少两台摄像机和两个光源的硬件配置,否则就不能解决头动问题。但是由于使用者眼球的独立信息的限制,如角膜半径和瞳孔与角膜中心的距离非常小(一般小于10mm),因此在不借助其他仪器的情况下,准确地间接估计眼球独立参数是很难实现的。即使采用一台摄像机和两个光源配以使用者眼睛独立参数的方案,在系统标定过程中也要使用至少两台摄像机。此外,因为需要估计角膜球面中心的空间位置,而角膜球面中心不可见,需要至少两个光源的像去估计角膜球面中心的空间位置。所以两台摄像机和两个光源是高性能视线估计的基本硬件配置。
five-spot模型建立了一种双摄像机双光源条件下眼球光轴的计算方法。该模型估计眼球光轴三维方向只需要一次直线求交运算,以此为基础形成一种新的视线估计方法。该方法实现了自然头动视线估计,并且将用户标定简化为单点标定。基于five-spot模型的视线估计方法,包括眼球光轴与视线估计和用户标定。这种模型所适用的视线追踪系统为双摄像机双光源视线追踪系统。
1.眼球光轴与视线估计
如图8.27所示,根据球面反射成像原理,光源C1、C2经角膜球面反射所成的像P1、P2在光源与角膜球面中心O的连线上。也就是说,在角膜球面未知的情况下,可以由直线C1P1与C2P2的交点来确定中心O的位置。另一方面,根据球面折射成像原理,瞳孔与经角膜球面折射所成的像在同一半径方向上,即瞳孔中心P0′与瞳孔中心虚像P0都在眼球光轴上。所以在瞳孔中心P0′未知的情况下,可以用瞳孔中心虚像P0代替P0′估计眼球光轴。
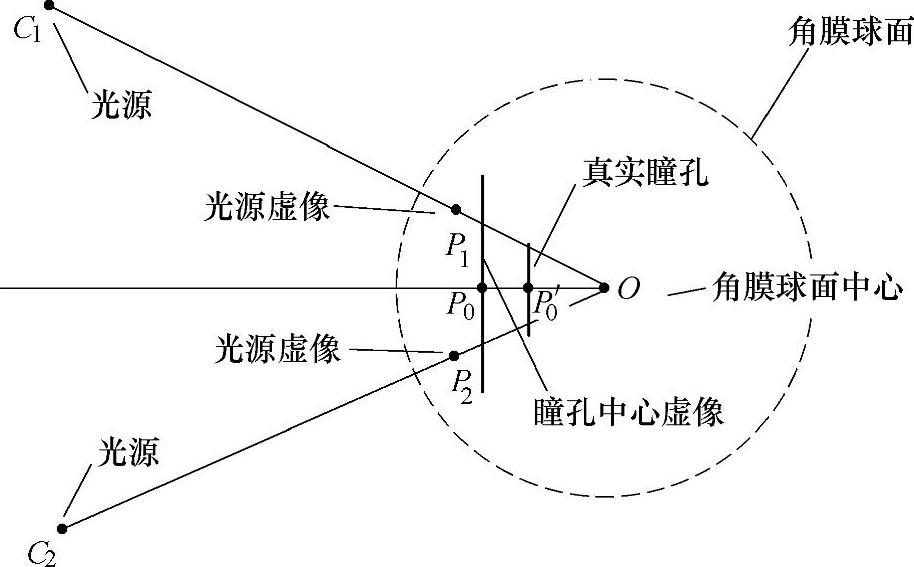
图8.27 five-spot模型
球面中心O与瞳孔中心虚像P0的连线即为光轴方向,若已知C1、C2、P1、P2、P0五个空间点,只需要一次直线求交运算就可以得到眼球光轴方向。C1、C2的三维坐标由系统标定得到,P1、P2、P0的三维坐标由三维特征提取得到。得到眼球光轴方向以后,根据用户标定结果,利用光轴和补偿角得到视线方向。具体步骤如下:
1)光源C1、C2及其虚像P1、P2形成两条直线——C1P1、C2P2。如果这两条直线相交,那么交点O就是角膜球面中心。如果两条直线异面(由于误差不完全相交),那么求出公垂线,公垂线的中点O就是角膜球面中心。具体方法是先将C1P1和C2P2写成两点式,即

为了简化,设

则

设公垂线与两直线的交点M1和M2分别是 和
和 。则
。则 为
为

因为M1M2⊥C1P1和M1M2⊥C2P2,有(x,y,z)·(A1,B1,C1)=0和(x,y,z)·(A2,B2,C2)=0,即

解得t1、t2,则M1、M2可求。中点为
2)连接角膜球面中心O和瞳孔中心虚像P0,直线OP0就是眼球光轴。
3)根据用户标定结果,利用光轴OP0和补偿角α、β得到视线方向OP。
4)计算视轴与屏幕交点,即为视线注视点。具体方法如下:已知视线方向直线OP和平面方程A1x+B1y+C1z+D1=0。OP写成两点式

设p·x-o·x=L1,p·y-o·y=L2,p·z-o·z=L3,则

设直线与平面得交点M为 ,因为交点M在平面上,所以符合平面方程,代入平面方程,有
,因为交点M在平面上,所以符合平面方程,代入平面方程,有

解得

那么交点M可求。(www.daowen.com)
2.用户标定
由于视网膜中心(即Fovea)不完全在眼球几何轴线上,所以视线方向与眼球光轴存在一定的夹角(角kappa)。视线方向与眼球光轴在水平方向夹角大约为5°(左眼为5°,右眼为-5°),竖直方向夹角大约为1.5°。不同使用者之间最大存在3°的差异。使用者第一次使用时需要标定其角kappa,具体步骤如下:
1)使用者注视屏幕上固定点Pc,同时根据上一过程计算出光轴方向OP0。
2)连接眼球中心O和固定点Pc,得出视线方向OPc。
3)分别求出视线和光轴两直线的方位角α1、α2和β1、β2(α1、α2角为轴线与X-Z平面的夹角,β1、β2角为轴线在X-Z平面投影与-Z轴的夹角),那么差角α=α1-α2,β=β1-β2,就可以作为视线和光轴的补偿,如图8.28所示。
3.实验结果
(1)不同使用者的视线估计结果
在双摄像机双光源视线追踪系统中,对不同使用者的视线估计效果进行了测试,测试过程中系统将实时记录下所有视线信息,并计算出在分别注视每个目标对象的一定时长内所有落点的误差均值。
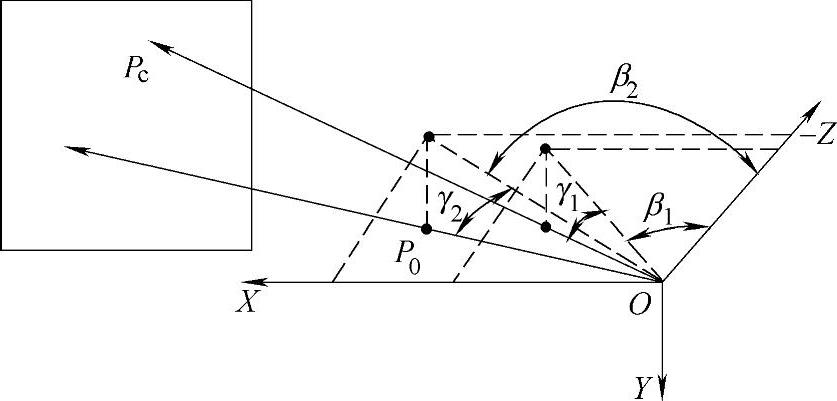
图8.28 视线与光轴夹角
对数据进行离线处理,得到7位使用者在几个位置上对注视屏幕上所有对象的追踪精度平均水平(见表8.6),水平方向平均精度为1.0°左右,竖直方向平均精度为1.2°左右。为了更形象地反映表8.6中数据的含义,图8.29所示为使用者1的视线估计角度误差分布情况,图8.30所示为使用者3的估计视线与真实视线的比较。
表8.6 不同使用者的视线估计结果
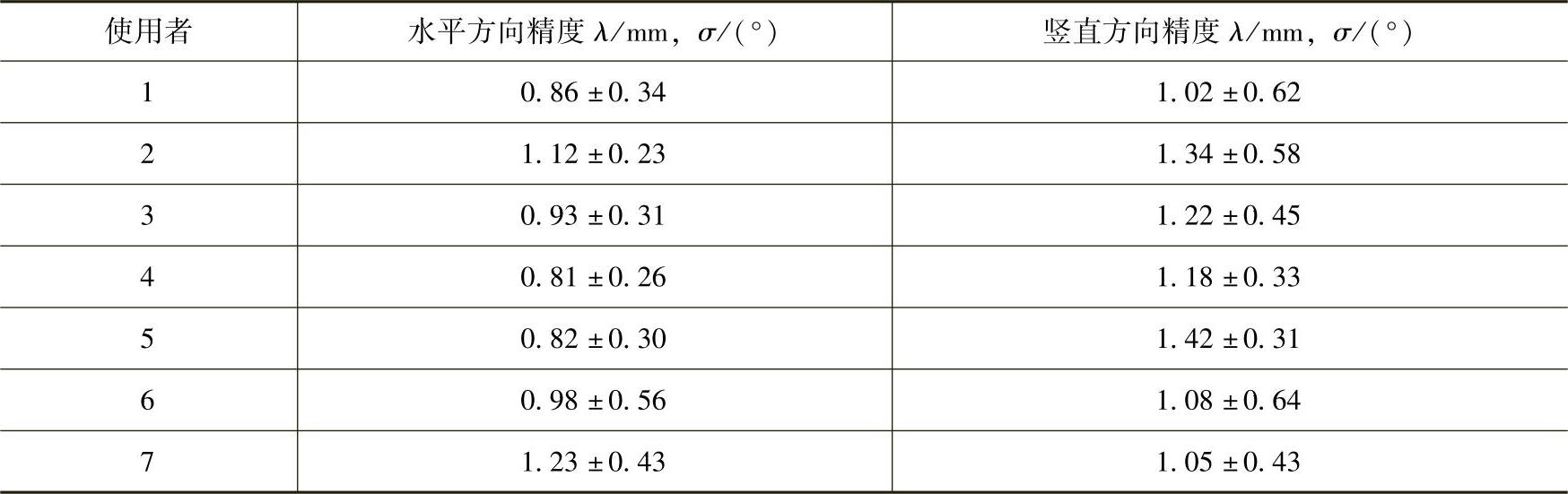
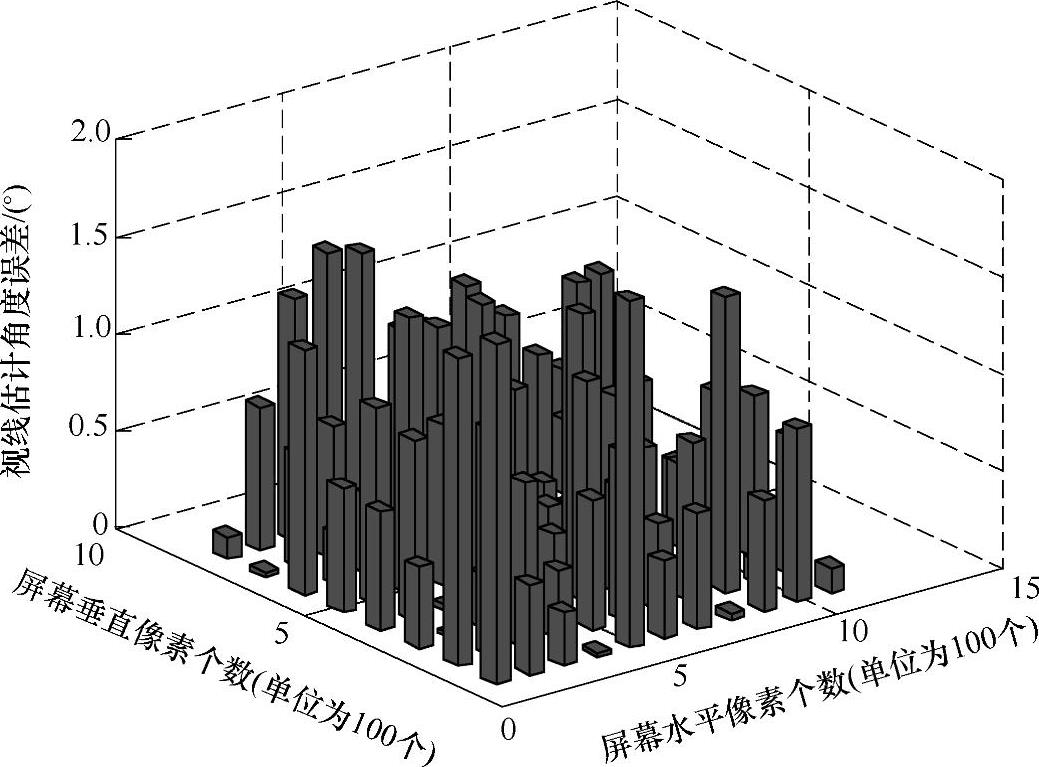
图8.29 使用者1的视线估计角度误差分布
(2)与其他视线估计方法的比较
对几种视线估计方法进行了对比。图8.31给出使用者视线估计结果与真实视线的角度误差。

图8.30 估计视线与真实视线比较

图8.31 视线估计结果与真实视线的角度误差
参考文献[7]描述了一种典型的二维映射模型视线估计方法。为了估计眼睛的注视点,必须从图像序列得到5个角膜反射和瞳孔中心。首先检测角膜反射,第一步是输入暗瞳图像的阈值以获得二值图像;第二步是对二值图像进行二值化,在二值图像中有4个红外角膜反射点;第三步是计算各个区域的中心位置。
然后是瞳孔中心检测,阈值分割法确定瞳孔中心区域。由于不适当的阈值和噪声,瞳孔边界区域有时不清楚,无法用质心法准确检测瞳孔中心。为了降低噪声的影响,考虑到瞳孔边界近似于椭圆,用椭圆拟合可以减少噪声影响,提高检测精度。第一步是分别获得亮瞳和暗瞳图像;第二步是通过阈值对图像进行差分,由此产生的图像是一个二值图像;第三步是确定瞳孔区域的边缘;第四步是直接用椭圆拟合算法计算瞳孔中心位置。
参考文献[9]描述了一种典型的直接三维视线估计方法。这是一种完全依靠空间几何计算实现用户视线落点运算的方法。其主要思路是通过计算用户真实的空间视线方向与屏幕的交点来确定瞳孔中心。通过双目视觉定位原理测定在眼睛中产生的普尔钦斑的空间坐标。由于将角膜看做了一个凸镜,所以根据凸镜原理就可以测定由多光源形成的多普尔钦斑在角膜中的位置,进而可以通过普尔钦斑和光源连线的交点确定角膜曲率的中心。由于角膜曲率中心和瞳孔中心在同光轴上,所以可以通过双目视觉测定瞳孔中心后,得到光轴的空间方向。根据眼球构造原理,人类的视觉是由视轴决定的,而光轴和视轴间存在一个与个人特征无关的固定偏差角kappa,通过偏差角就很容易求得视轴方向。偏差角kappa可以通过一个简单的校准得到。在校准过程中,用户要注视屏幕上k个预先设定的点(i=1,2,…,k),这里k为9。在校准过后,得到3×3的旋转矩阵M。一旦得到旋转矩阵M,眼睛的视轴就可以通过光轴和旋转矩阵M得到。最终,注视点可以通过估计空间视轴和任意物体的交叉点得到。
图中蓝色曲线(即细实线)为本节所述方法对视线的跟踪轨迹,绿色曲线(即线虚线)为参考文献[7]中二维映射模型视线估计方法对视线的跟踪轨迹,红色曲线(即点虚线)为参考文献[9]中直接三维视线估计方法对视线的跟踪轨迹。图中横轴为人眼与标定位置的距离,纵轴为视线估计角度误差。由图8.31可知:
1)在标定位置几种算法都能正确估计视线。
2)随着使用者头部远离标定位置,参考文献[7、9]所述方法虽仍能估计视线,但结果已明显不再准确。而five-spot模型在整个头部运动过程中,都能一直保持对视线的稳定估计能力。
3)相对于参考文献[7]中二维映射模型视线估计方法和参考文献[9]中直接三维视线估计方法,five-spot模型能更为准确和稳定地估计视线。其估计结果与真实视线的误差最小,完全能满足实时视线追踪对精度的要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







