1.系统标定结果
按照上述视线追踪系统的标定方法对系统双摄像机和标定双摄像机进行了标定,并完成了双视觉空间三维坐标计算。在此基础上对光源和显示屏幕进行了标定。摄像机标定和双视觉系统标定采用MATLAB编程实现,获得摄像机内外参数和双视觉系统结构参数,标定结果如下:
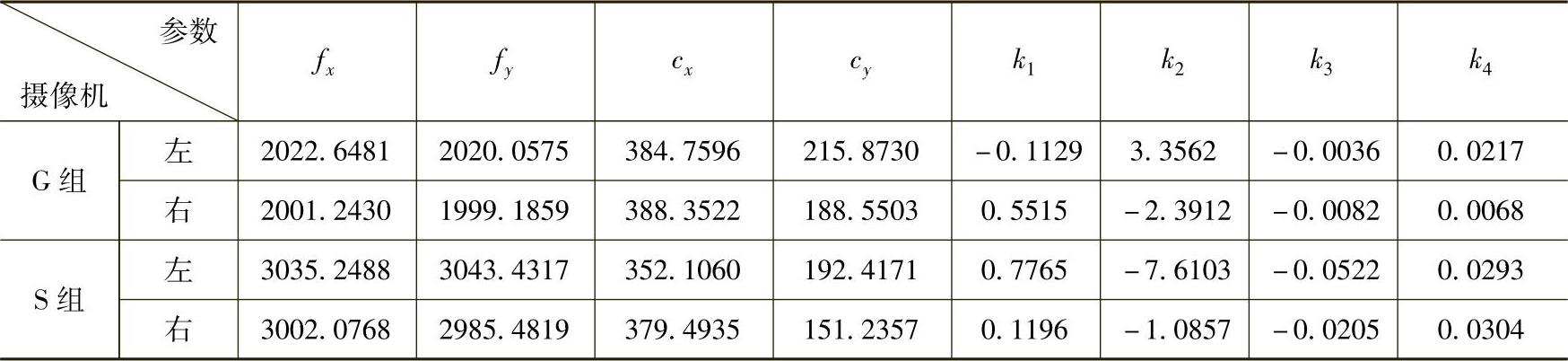
1)G组与S组各摄像机内参数及畸变系数见表7.2。
表7.2 各摄像机内参数及畸变系数
2)G组与S组双视觉摄像机系统的结构参数见表7.3,外参数示意图如图7.29所示。
表7.3 各组摄像机结构参数
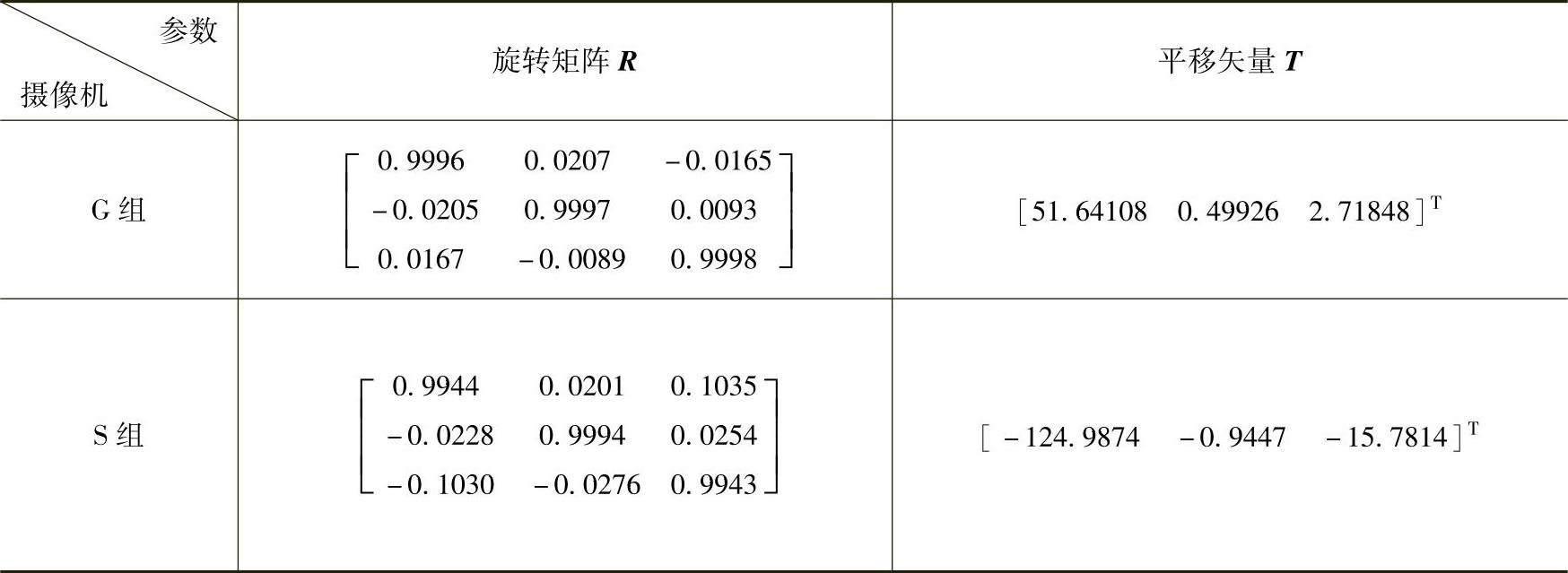
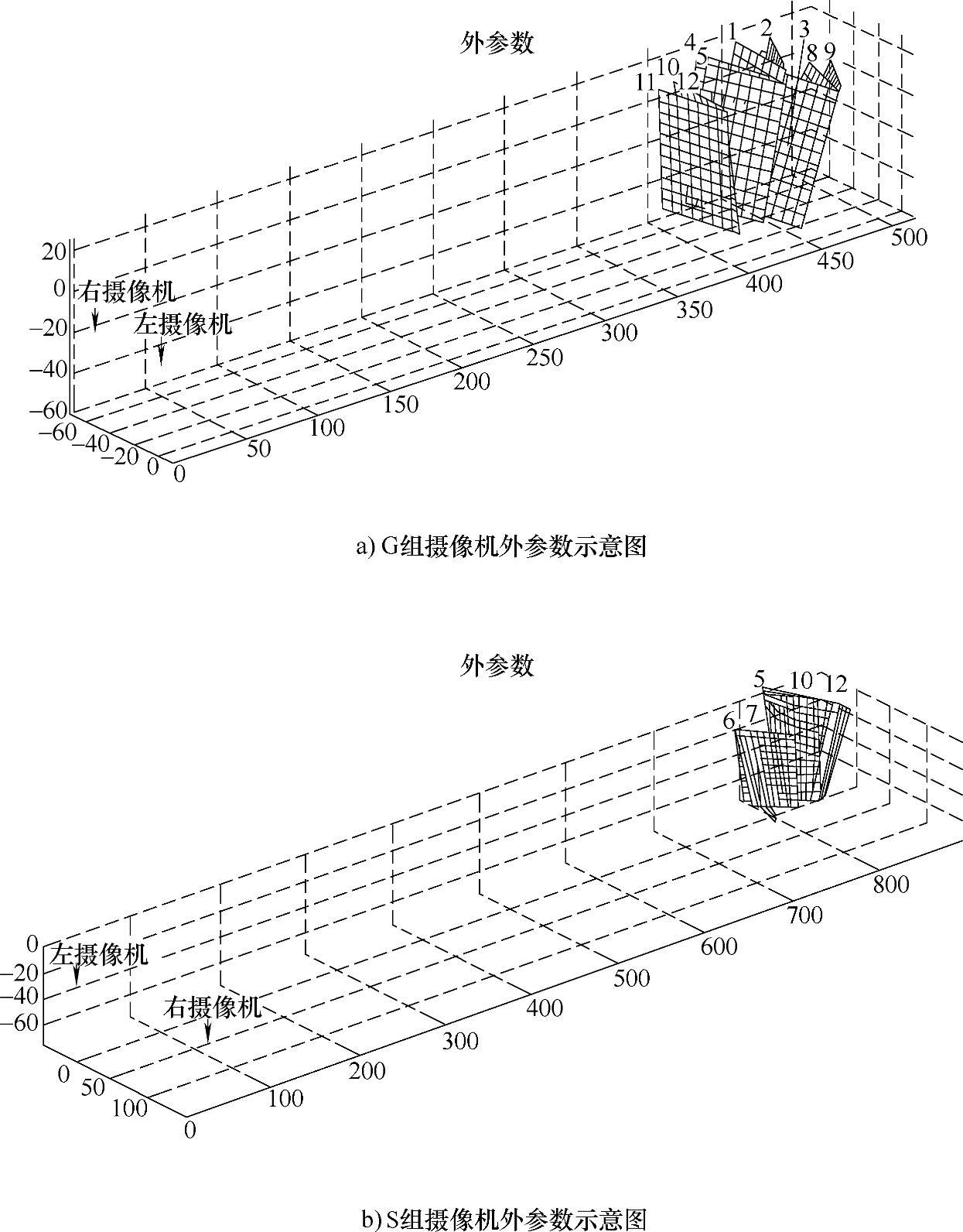
图7.29 双视觉摄像机外参数示意图
视线追踪系统光源和显示屏幕标定采用VC++编程实现,获得G组与S组摄像机坐标系转换矩阵、光源中心三维坐标和显示屏幕平面方程。标定结果如下:
1)G组与S组摄像机坐标系之间旋转矩阵与平移矩阵见表7.4。
表7.4 G-S组摄像机结构参数

2)通过S组摄像机测量显示屏幕目标靶上的控制点三维坐标,然后应用7.5.3.1节坐标转换方法将三维坐标转换到系统摄像机坐标系下。对屏幕上54个点进行批量采集和计算,其过程转换数据见表7.5。经多点拟合法[10]拟合的平面方程:
z=0.2359x-0.0204y-110.1236 (7.69)
表7.5 显示屏幕上点的坐标转换数据表
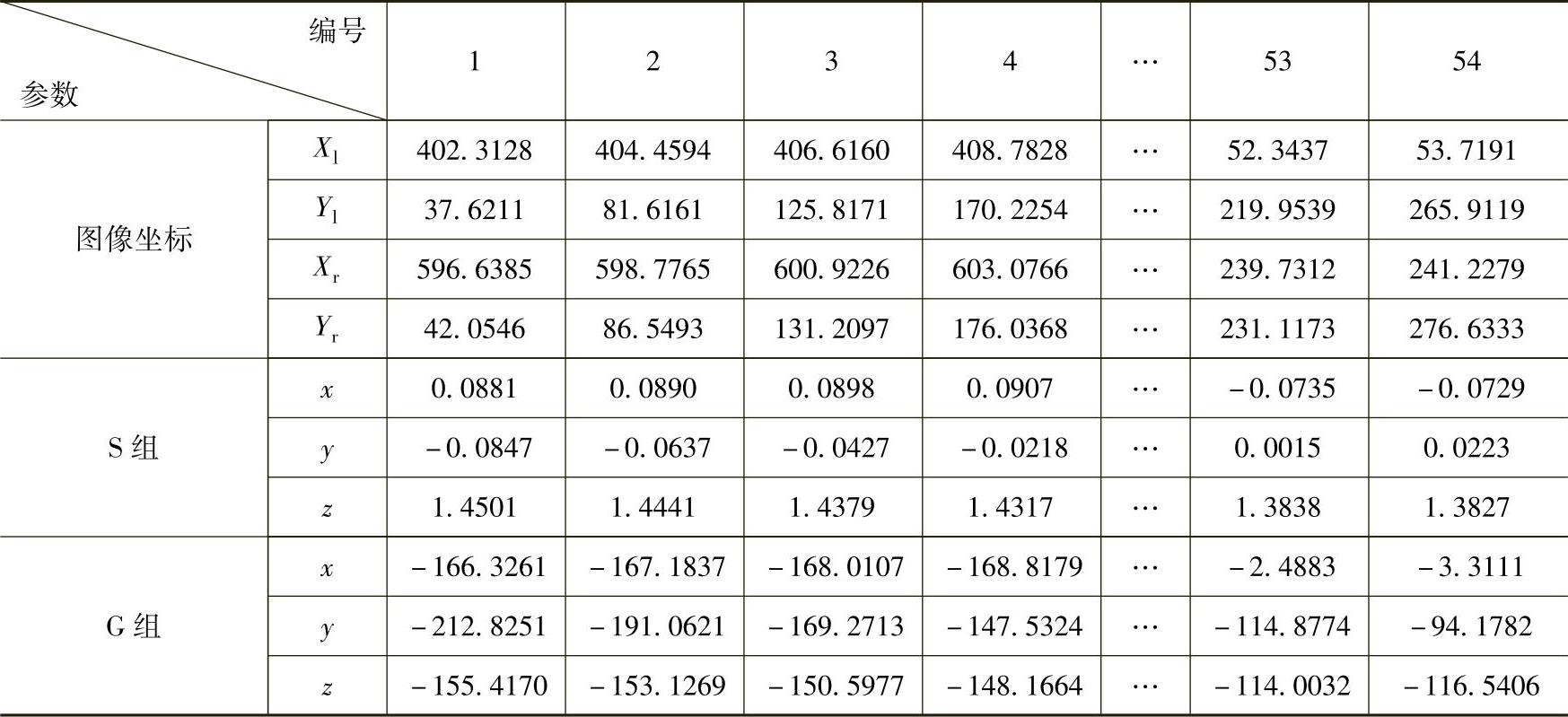
注:S组下坐标的每个值还须乘以103。
3)与显示屏幕标定过程相似,检测的光源中心在G组坐标系下的坐标为
(x1G,y1G,z1G)=(-2.0223,4.4484,28.4076)
(x2G,y2G,z2G)=(-47.0928,2.8885,38.2253)
2.标定结果验证与误差分析
(1)单摄像机标定的误差评定(https://www.daowen.com)
采用重投影误差来评定单摄像机标定结果。视线系统左右摄像机重投影误差如图7.30所示,最大误差在1个像素以内,符合标定要求。
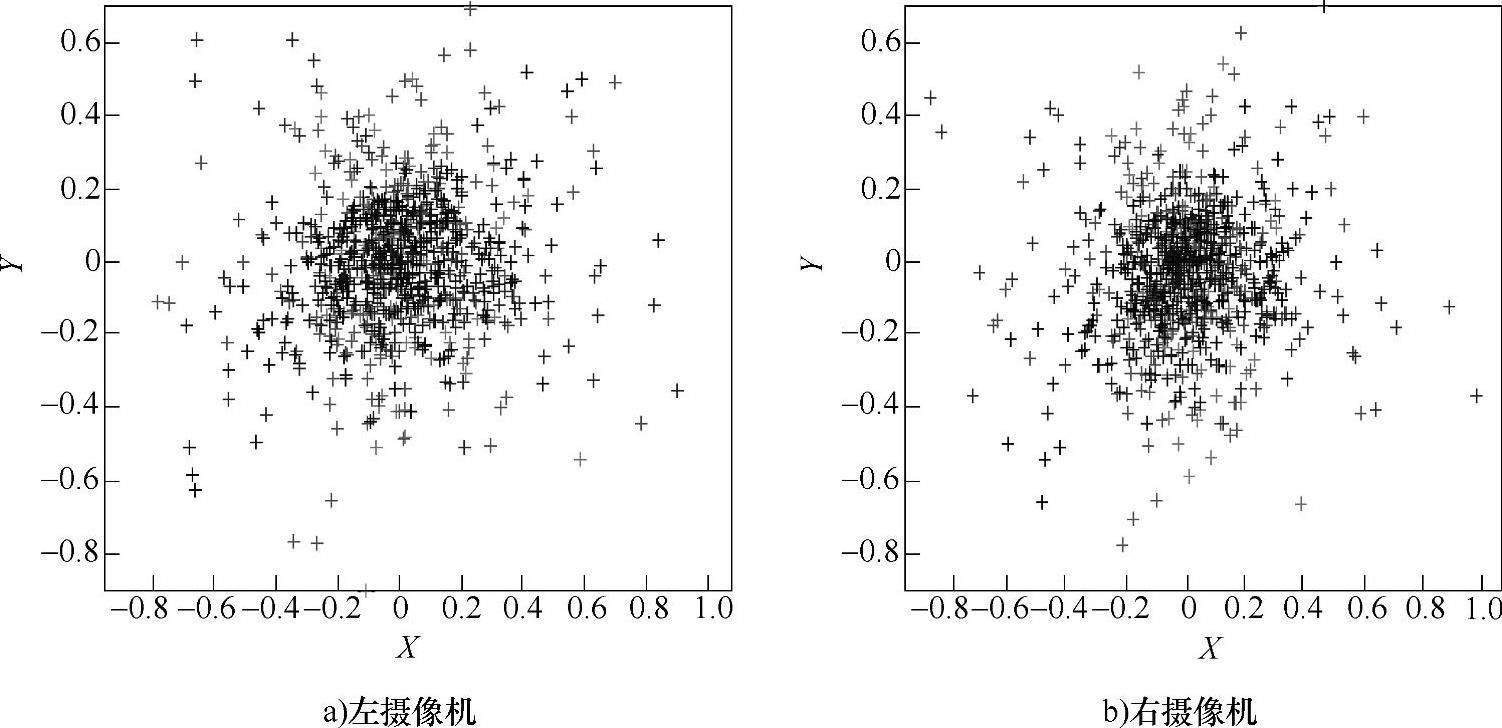
图7.30 重投影误差
(2)双摄像机标定及三维坐标测量评定
采用基准长度比对法[11]来评定双视觉系统结构参数标定和三维坐标测量结果,即将标定板上相邻角点实际长度作为公称值,利用系统对标定板上各角点进行测量,计算出基准长度实测值,将其与公称值比对,再计算其均值误差。假设测模板上某一点三维坐标为(Xi,Yi,Zi),其相邻角点的三维坐标为(Xi+1,Yi+1,Zi+1),则模板上相邻角点之间的距离计算如下: 。三维测量误差ε=
。三维测量误差ε= 。其中,d为棋盘格给定间距值,即公称值。本系统双目标定靶公称值d=6.08mm。N表示参与运算的标定点个数。利用96点进行重叠运算,实验结果误差为0.07377mm,能够满足系统要求。
。其中,d为棋盘格给定间距值,即公称值。本系统双目标定靶公称值d=6.08mm。N表示参与运算的标定点个数。利用96点进行重叠运算,实验结果误差为0.07377mm,能够满足系统要求。
(3)全局标定误差评定
通过全局标定确定S组和G组摄像机坐标系之间的转换矩阵,并对全局标定结果进行精度评定实验。即利用控制点在S组摄像机坐标系下的三维坐标反算到全局坐标系(即G组摄像机坐标系),然后再跟G组摄像机实际测得的结果进行比对,然后计算其RMS误差。表7.6给出了6个标定点三维坐标反算对比结果。
表7.66 个标定点三维坐标的反算对比结果
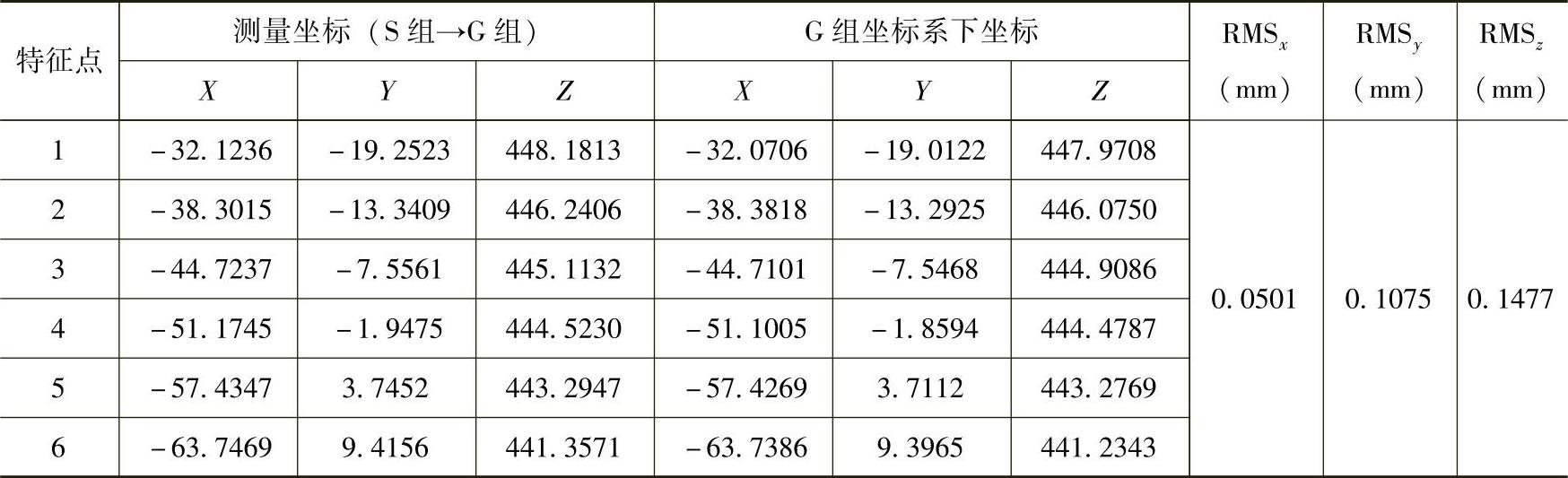
由表可见,Z轴坐标误差最大,Y轴次之,X轴最小,但都在误差允许范围之内。在多摄像机转换过程中仅用了一次坐标转换,有效地减少了误差。
(4)光源、屏幕标定误差分析
光源屏幕标定误差由光源屏幕测量,以及重建误差、坐标转化误差和全局标定标目标靶误差几部分构成。下面简要分析其传递关系。
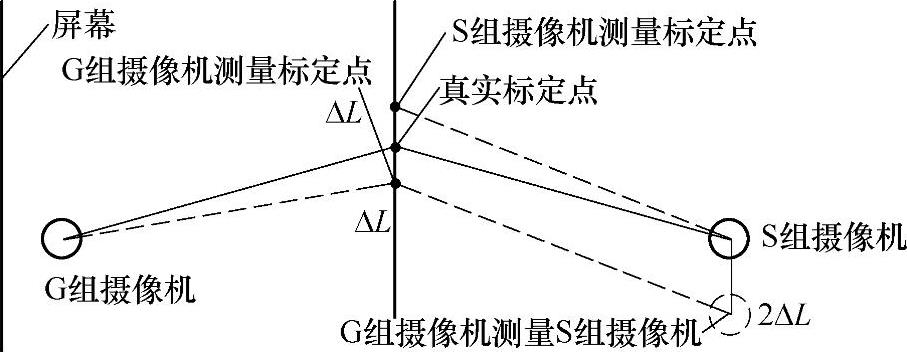
图7.31 坐标系转换误差传递关系
如图7.31和图7.32所示,设G组和S组摄像机的测量误差均为ΔL,标定时G组和S组摄像机均观测同名矢量点,但靶标上同名矢量点并不是精确的同一个控制点。考虑到靶标很薄,根据误差叠加,对于两组摄像机转换关系的标定结果,G组摄像机至少会产生2ΔL的误差。标定屏幕和光源时,S组摄像机的观测结果也会产生ΔL的误差。这样标定屏幕和光源的结果至少会造成3ΔL的误差。由于G组和S组摄像机测量误差不超过0.08mm,所以光源和屏幕的标定结果会产生约0.08mm×3=0.24mm的误差。这时双面目标靶厚度应控制在0.25mm。
3.视线方向检测结果
上述系统标定结果无法在系统范围内验证,因此以视线追踪系统运行效果,即视线方向检测结果,来验证上述标定结果是否满足系统要求。
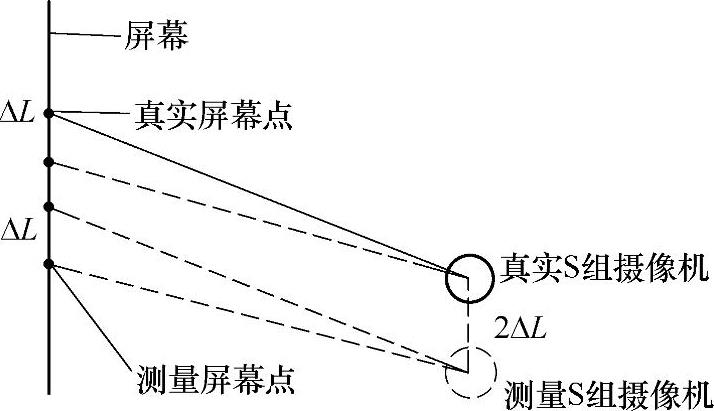
图7.32 光源屏幕坐标转换误差传递关系
在上述北京科技大学所开发的双摄像机双光源视线追踪系统中,采用基于多摄像机全局标定的视线追踪系统标定方法标定系统光源和屏幕,使用该系统对不同使用者的视线估计效果进行了测试。测试过程中系统将实时记录下所有视线信息,并计算出分别计算每个目标对象时一定时间
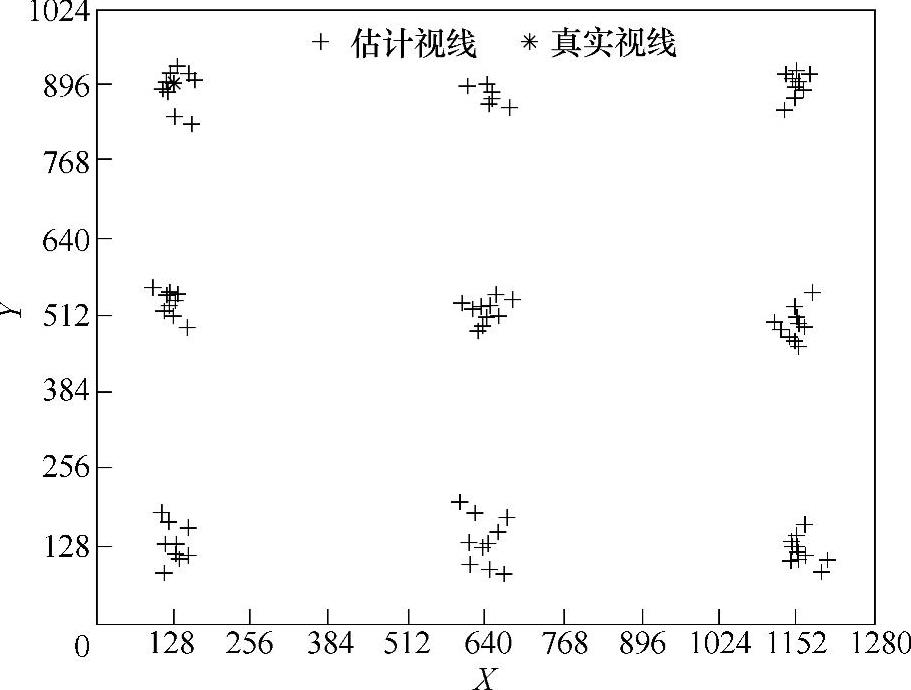
图7.33 估计视线与理想视线落点比较
段内所有落点误差均值。对数据进行离线处理,得到7位使用者对屏幕上盯视点的追踪精度平均水平,水平方向平均精度在1.5°左右,垂直方向平均精度在1.9°左右,说明标定结果能够基本满足系统视线方向检测的需要。图7.33所示为视线落点估计结果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




