在本书7.3节中给出了双摄像机双光源视线追踪系统的反射标定方法,反射法是多摄像机视线追踪系统普遍应用的标定方法。本书7.4节给出了平面镜反射标定法但是平面镜反射标定法有如下缺点:
1)使用平面镜成像会产生一定程度的模糊与形变,加大了标定过程中特征点提取的难度和误差;
2)使用平面镜成像,真正的成像面是水银面,而标定靶标贴在平面镜的玻璃面上,水银面和玻璃面相差大约5mm的距离,势必会引入误差;
3)为了拍摄到完整的光源及屏幕,需要较大的平面镜,故标定过程需要转动厚重的平面镜标定靶并且难以固定,为标定过程带来不便;
4)平面镜上靶标与平面镜中显示的屏幕和光源像的景深是真实景深的2倍,很难同时得到两者的清晰图像。
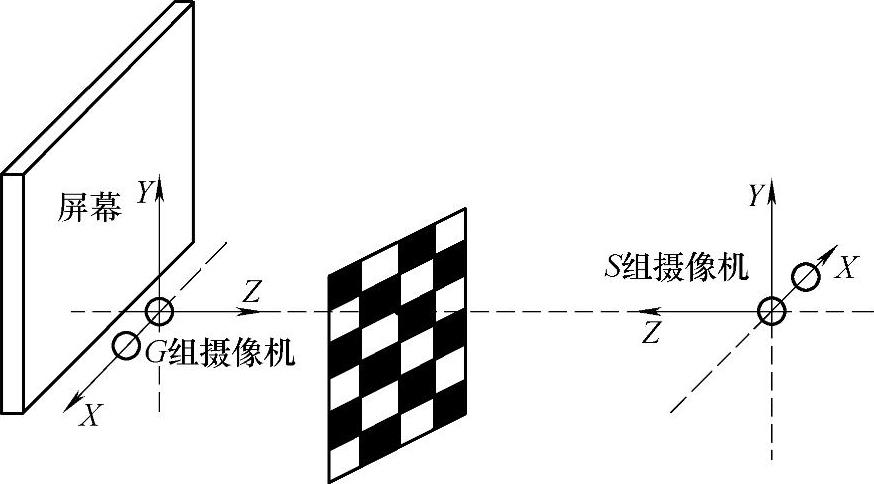
图7.21 视线追踪系统标定示意图
本节介绍了一种基于多摄像机全局标定的视线追踪系统标定方法。这种方法主要是针对反射标定法的不足和双摄像机双光源视线追踪系统的标定要求提出的。该方法通过在屏幕和光源对面放置一对标定摄像机,从而与系统摄像机构成多摄像机系统。标定摄像机直接拍摄标定目标,测量系统摄像机、光源和屏幕之间的空间位置关系。通过全局标定确定系统摄像机和标定摄像机的坐标转换关系。通过坐标转换最终标定出系统摄像机坐标系中摄像机、光源、屏幕的空间位置关系。该方法解决了屏幕和光源不在系统摄像机视野范围内的问题。标定摄像机的焦距较大且将之置于离标定靶相对较远的位置。这样能够将屏幕和光源都显示在标定摄像机图像中,并有效克服了景深问题。系统摄像机和标定摄像机之间的空间位置关系由全局标定获得,所用标定靶为薄平面双面棋盘格。(https://www.daowen.com)
由上述内容可知,基于全局标定的视线追踪系统标定包含以下内容:
1)摄像机标定和双目视觉系统标定,用来保证基于视觉的三维空间测量。三维空间测量是提取视线参数的手段,也是系统标定的基础。
2)视线追踪系统光源、屏幕空间位置测量可称为系统标定。系统标定是获取三维视线方向的必要条件。
为解决系统标定中屏幕和光源在摄像机拍摄范围之外的问题,基于上述设计要求采用一种基于多摄像机全局标定的视线系统标定方法。
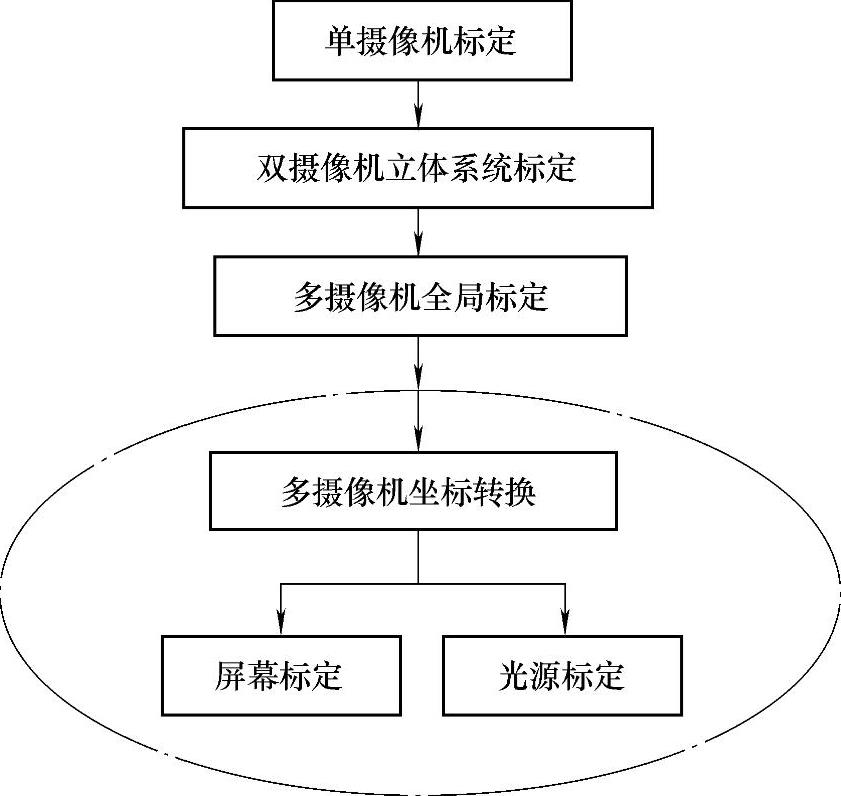
图7.22 视线追踪系统标定流程
为了方便表达,以下将系统双摄像机记作G组摄像机,将标定双摄像机记作S组摄像机,为了使整个视线追踪系统处于统一的坐标系,建立以G组左摄像机光心为原点的世界坐标系。将一个正反面完全对称的棋盘格标定靶置于两组摄像机之间任意位置,转动标定靶,并用两组摄像机拍摄各个位置的标定靶。首先,通过拍摄的标定靶图像进行单摄像机标定,计算出各摄像机的内外参数。再对每组摄像机进行组内双目立体系统标定,计算出组内摄像机之间的结构参数,从而计算出标定靶上每个控制点在每组摄像机坐标下的三维空间坐标。最后,利用同名坐标统一法计算出两对摄像机之间的位置关系,将S组摄像机的测量结果转换至G组摄像机坐标系。从而解决了显示屏幕和光源在G组摄像机视野范围之外而无法测量的问题。标定系统如图7.21所示,视线追踪系统标定流程如图7.22所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




