1.光学畸变一般概念
如图7.2所示,由于摄像机物镜系统设计、制作、装配引起像点偏离,其理想位置的点位误差称为光学畸变。光学畸变分为径向畸变和偏心畸变。径向畸变使像点沿径向方向偏离其标准理想位置。偏心畸变使像点沿径向方向和垂直径向方向,相对其理想位置都发生偏离。其径向方向的畸变称为非对称径向畸变,垂直径向方向的畸变称为切向畸变。理想像点与实际像点的位置关系如图7.3所示。摄像机镜头畸变一般为桶形畸变和枕形畸变。
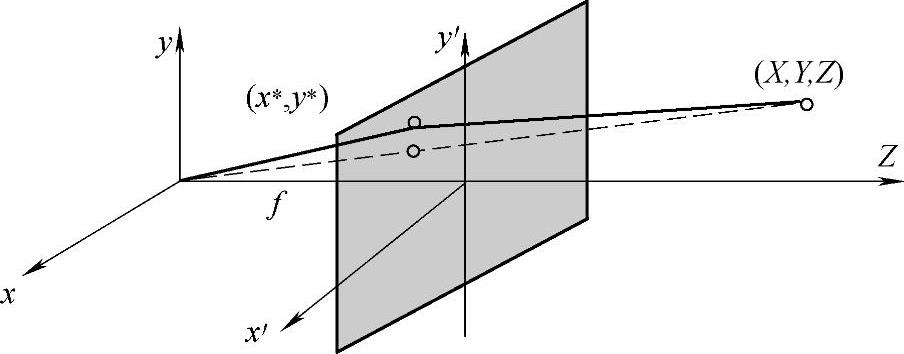
图7.2 畸变产生示意图
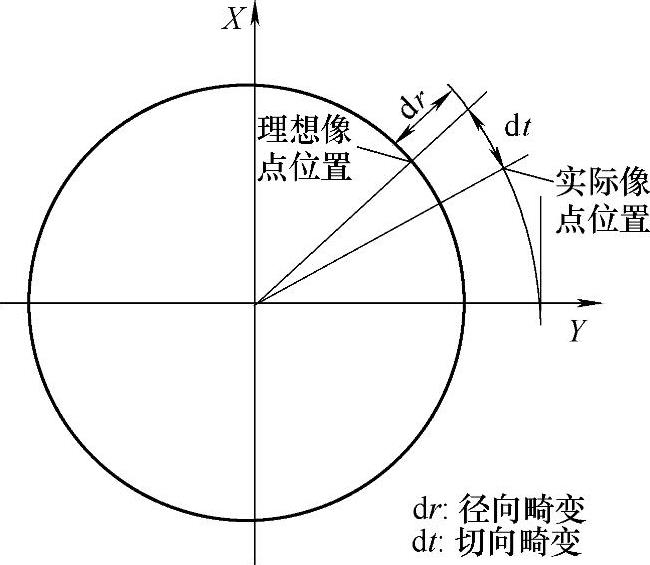
图7.3 理想像点与实际像点位置关系
实验表明,线性模型在很多情况下不能准确描述成像的几何关系,尤其在使用广角镜头时,在远离图像中心处会有较大的畸变。
进行摄像机标定时,必须考虑镜头畸变。主要畸变误差分为三类:径向畸变、偏心畸变和薄棱镜畸变。第一类畸变只产生径向位置的偏差,后两类则既产生径向偏差,又产生切向偏差。
2.畸变误差模型
(1)径向畸变
径向畸变主要由镜头的形状所引起的,关于摄像机镜头的主光轴对称。正向畸变称为枕形畸变,负向畸变称为桶形畸变。其数学模型为

式中,k1,k2为径向畸变系数。(https://www.daowen.com)
(2)偏心畸变
偏心畸变主要由光学系统光心与几何中心不一致造成的,即镜头器件的光学中心不能严格共线。这类畸变既含有径向畸变,又含有切线畸变。其数学模型为

式中,p1,p2为偏心畸变系数。
(3)薄棱镜畸变
薄棱镜畸变是由于镜头设计缺陷和加工安装误差所造成的,如镜头与摄像机像面有很小的倾角等导致的误差。这类畸变相当于在光学系统中附加了一个薄棱镜,不仅会引起径向偏差,而且引起切向偏差。其数学模型为

式中,s1,s2为薄棱镜畸变系数。
综合上述各类畸变模型,则镜头畸变可以用如下模型表示:

一般来说径向畸变已经足够描述非线性畸变。如果考虑镜头畸变,需要对小孔成像模型进行修正,实际像素坐标(x*,y*),理想像素坐标(x′,y′)和畸变偏差之间关系可写为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




