【摘要】:最常见的成像变换是几何透视变换,几何透视变化的特点是随着3D场景与摄像机之间距离的变化,像平面上的投影也发生变化。假设摄像机理想成像不存在非线性畸变,如图7.1所示,景物点发出的光线经过光学镜头中心,与成像平面的交点,即为像点。为方便起见,通常认为图像平面在针孔前面,即虚拟图像的位置。图7.1 小孔成像模型
最常见的成像变换是几何透视变换,几何透视变化的特点是随着3D场景与摄像机之间距离的变化,像平面上的投影也发生变化。为了阐述摄像机模型和摄像机标定方法,需定义相关坐标系。
1.成像坐标系统
1)世界坐标系。也称真实或现实世界坐标系统XYZ,它是客观世界的绝对坐标系,也是物方坐标系,一般3D场景都用这个坐标系来表示。
2)摄像机坐标系统。以摄像机为中心制定的坐标系统xyz,一般常取摄像机光学轴为z轴。
3)像平面坐标系统。在摄像机内所形成的像平面坐标系统x′y′。一般常取像平面与摄像机坐标系同的xy平面平行,且x轴与x′轴,y与y′轴分别重合,这样像平面原点就在摄像机的光学轴上。
4)计算机图像坐标系统。计算机内部数字图像所用的坐标系统MN。数字图像最终由计算机内部的存储器存放,所以要将像平面的投影坐标转换到计算机图像坐标系统中。(www.daowen.com)
2.小孔成像模型
在实际应用中,摄影光学系统往往采用小孔成像模型。小孔成像模型是计算机视觉中广泛采用的成像模型。假设摄像机理想成像不存在非线性畸变,如图7.1所示,景物点发出的光线经过光学镜头中心,与成像平面的交点,即为像点。景物点、针孔、景物点成的像在一条直线上,就像光线经过光学中心的一个小孔一样,故称小孔成像模型。为方便起见,通常认为图像平面在针孔前面,即虚拟图像的位置。
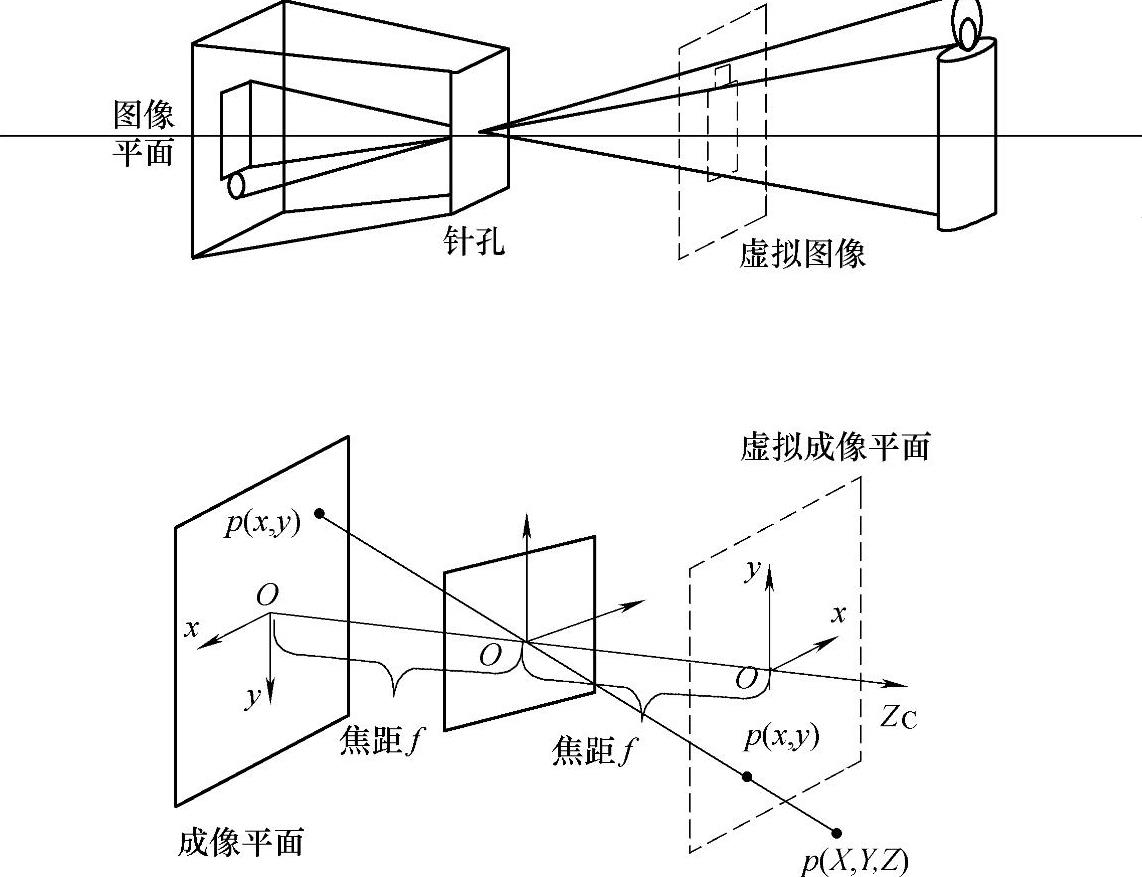
图7.1 小孔成像模型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





