1.特征参数提取
应用本书第5章阐述的视线参数检测方法进行瞳孔特征参数提取,检测成功则完成瞳孔跟踪的初始化。
2.瞳孔目标模型
瞳孔目标模型由一个空间矢量State={Cx,Cy,Cl,Cs,X,Y,Vx,Vy,Hx,Hy,ad}描述,其中Cx和Cy为瞳孔椭圆中心在图像中x方向和y方向的坐标值;Cl和Cs为瞳孔椭圆长轴和短轴的长度值;X和Y为矩形目标窗口中心在图像x和y方向坐标值;Vx和Vy为图像瞳孔目标在x和y方向移动速度;Hx和Hy为矩形目标窗口的宽和高;ad为目标窗口的尺度扰动幅度。
初始时刻目标状态已知,跟踪开始时以初始目标状态为中心,选择适度方差高斯函数对其进行采样得出跟踪开始时刻的一组粒子状态。
3.瞳孔运动模型
根据瞳孔运动模型对粒子状态进行预测,这里状态转移模型如下:

其中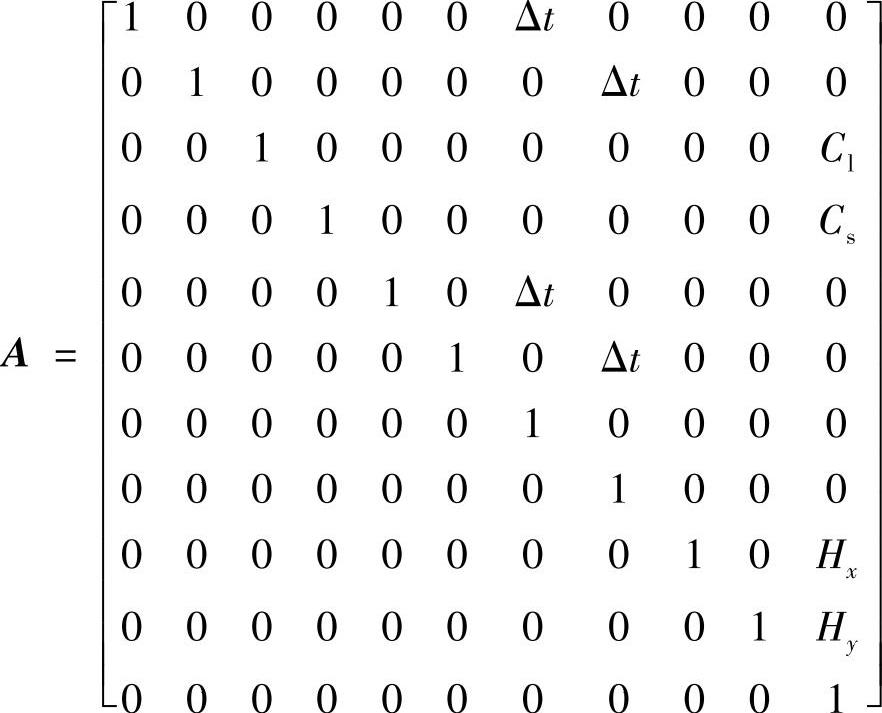 状态转移模型中噪声矢量V:η(t-1)~N(0,σ2)。
状态转移模型中噪声矢量V:η(t-1)~N(0,σ2)。
4.瞳孔观测模型
目标跟踪较为稳定的特征主要有颜色、纹理、形状等。在人脸等各种目标的跟踪计算中这些特征都有其各自的特点[10,11]。这里结合灰度特征和形状特征两种信息来描述瞳孔目标,以及对各粒子区域进行观测。灰度特征采用灰度直方图描述。形状特征则采用椭圆度特征描述。当某粒子区域的椭圆度越大,表明该粒子在形状特征上和瞳孔越接近。结合灰度和形状两种特征对瞳孔进行运动跟踪,可增强跟踪的稳定性。
(1)灰度特征——灰度直方图
设指定区域中心点为(x0,y0),像素点数目为N,区域宽高分别W、H,则有
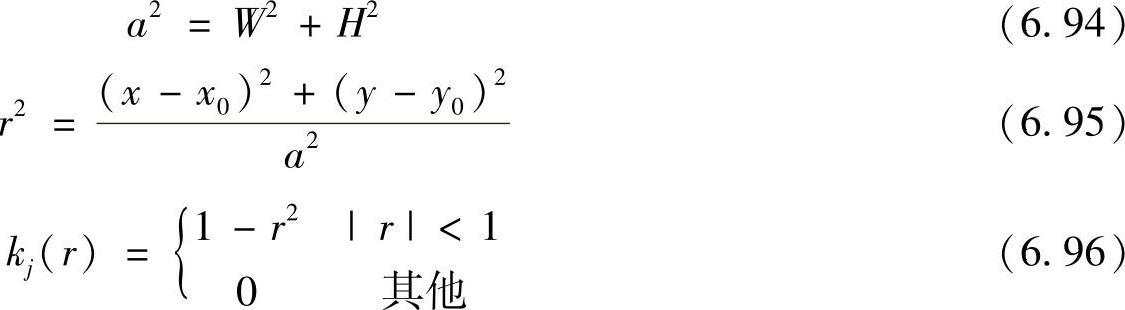
式中,kj(r)为核函数。因此核密度加权直方图为

式中, 1;h(xj)为每个像素点的灰度值;u=1,…,bins为灰度级。
1;h(xj)为每个像素点的灰度值;u=1,…,bins为灰度级。
(2)灰度观测模型
设模板灰度统计直方图为pu,粒子stateit的直方图为qit,则该粒子的灰度观测量为

其中,di为欧氏距离,即

(3)形状特征——椭圆形度
先对各粒子区域进行二值化处理,之后对粒子区域的二值化图像数据进行椭圆形度计算。设椭圆形度为R,则R=4πS/L2。其中,S是粒子区域所含物体的面积,以像素数表示;L指区域内所含物体的周长,也以像素数表示。R的取值范围是[0,1],物体越圆,椭圆形度值越大,理想情况下标准圆的值为1。瞳孔椭圆的形状特征可以用椭圆形度来定量描述。
(4)形状观测模型
计算出物体的椭圆形度后,根据以下模型得出形状观测量:

式中,R为当前时刻瞳孔椭圆形度。图6.25所示为瞳孔椭圆形度示意图。
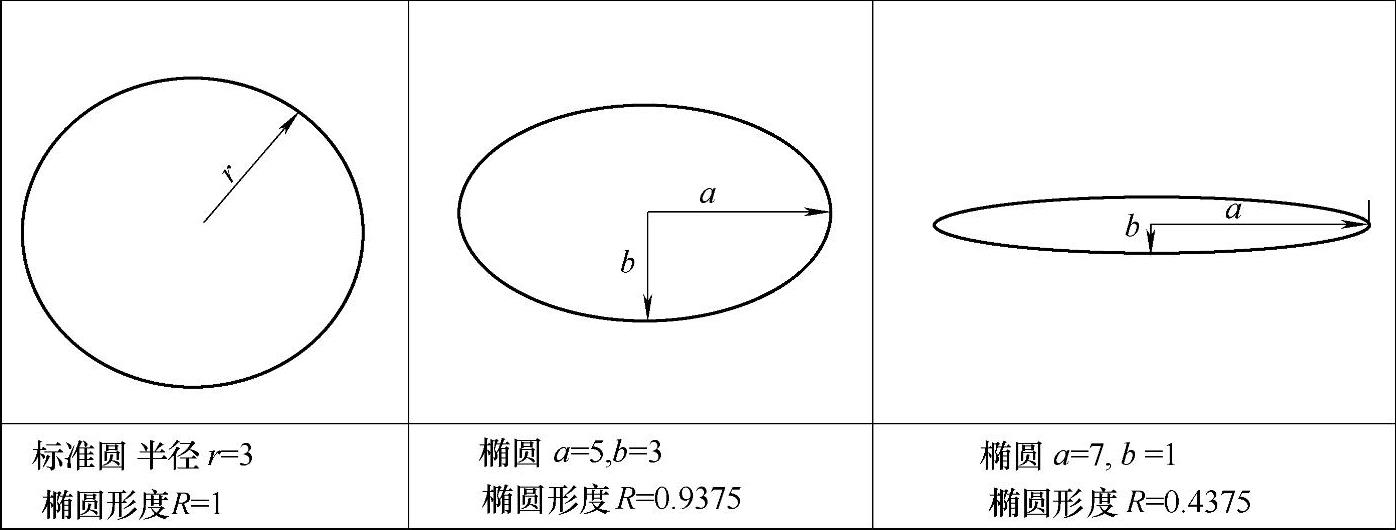
图6.25 瞳孔椭圆形度示意图
结合灰度和形状特征由下式得到各粒子的观测量,即权重为

式中,α为0~1的小数。
(5)新状态估计及模板更新
1)新状态估计

式中,N为粒子数。新状态估计值将作为跟踪输出值。并带入模板更新过程与原模板相结合计算新的模板为下一步计算粒子权重值做准备。
2)重采样。对{stateti,ωit}Ni=1进行重采样,设新采样结果放在数组{stateMt,ωjt}Nj=1中,令ui为[0,1]上均匀分布的采样值,则满足 的stateMt被选择作为新采样数组中的元素,重复N次,得到一组新的粒子。重采样目的是将一些权重值较小的粒子淘汰,以免将其代入下一帧的状态转移方程中参与粒子状态预测计算,导致又产生权值较小的粒子影响跟踪效果[12];同时将一些权重值较高的粒子状态保留并复制,在重采样过程中一个权重值较高的粒子可能会被多次复制并用到下一步预测计算中。这样保证了粒子在迭代更新计算过程中和参与目标估计计算时,都能保持较高的权重值。如果不进行重采样运算,则算法经过几次迭代运算后只有个别若干粒子状态的权重值较大,而其他值较小,进而影响跟踪精度。(www.daowen.com)
的stateMt被选择作为新采样数组中的元素,重复N次,得到一组新的粒子。重采样目的是将一些权重值较小的粒子淘汰,以免将其代入下一帧的状态转移方程中参与粒子状态预测计算,导致又产生权值较小的粒子影响跟踪效果[12];同时将一些权重值较高的粒子状态保留并复制,在重采样过程中一个权重值较高的粒子可能会被多次复制并用到下一步预测计算中。这样保证了粒子在迭代更新计算过程中和参与目标估计计算时,都能保持较高的权重值。如果不进行重采样运算,则算法经过几次迭代运算后只有个别若干粒子状态的权重值较大,而其他值较小,进而影响跟踪精度。(www.daowen.com)
3)模板更新。在使用者头部位置变化等情况下,瞳孔形状会随着头部位置的变化而变化,因此瞳孔的灰度和形状特征也会和模板出现较大差异。此时,如果还用原有模板进行粒子相似度计算来对当前的瞳孔状态进行估计,估计结果会与真实目标状态的差异较大而影响跟踪精度。这种情况下,模板会结合每一次估计的新状态进行更新,减小相邻两帧图像目标之间的差异。
(6)眨眼等干扰处理
瞬间眨眼时图像中瞳孔灰度和形状特征都与模板的特征差异较大,此时由上一次粒子状态经状态转移模型计算的各粒子相似度(即权重值)都较小。若粒子权重值中的最大者与某阈值相比较小,则此组新粒子不参与目标估计的计算。粒子空间仍然保留上一次的粒子状态值,且此时目标仍然为上一次估计的目标状态。直到调入下一帧图像时,用状态转移模型对所保留的粒子状态进行外推,重新进行粒子滤波跟踪步骤,可以得到当前帧的目标状态,使跟踪过程中受瞬间眨眼干扰的影响较小。
5.粒子滤波瞳孔跟踪流程
设t时刻的第i个粒子状态为stateti,对应观测量为ωti,t时刻的粒子状态集为STATEt。
(1)跟踪初始化
1)计算目标灰度直方图

2)初始化各粒子状态

(2)预测粒子状态
建立瞳孔目标运动模型,即状态转移模型,有

根据状态转移模型对粒子状态进行预测,得到新时刻的粒子集合STATESt。
(3)对各粒子状态进行观测
1)对每个粒子的直方图进行计算

2)根据直方图计算各粒子与模板之间的欧式距离d,设模板直方图为q,t时刻第i个粒子区域的直方图 为
为
3)对每个粒子的颜色观测量之值进行计算,设t时刻第i个粒子的灰度观测量为Eti,有
4)计算每个粒子区域的椭圆形度为
5)计算各粒子区域的形状观测量之值为
6)综合颜色和形状特征计算每个粒子的观测量之值,即权重值为

(4)瞳孔目标状态估计
1)对目标状态进行估计,有
2)计算估计的目标状态的概率权重,设t时刻估计出的目标状态的概率权重为ωEt,欧式距离为dEt,圆形度为REt

(5)重采样
设粒子集{stateti,ωti}Ni=1,重采样结果放入{stateMt,ωji}jN=1中,取ui~U(0,1)。若有 ,则选出stateMt放入
,则选出stateMt放入 中,重复操作N次。
中,重复操作N次。
(6)更新瞳孔目标模型
程序为
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






