在序列图像中,目标跟踪的目的有两个:一是先跟踪后检测,即先由跟踪算法确定目标的位置,再在跟踪的区域对目标进行精细分割和检测;二是先检测后跟踪,即利用历史信息通过跟踪算法对检测得到的目标参数进行估计,以期获得更精确稳定的目标参数。前文所述的基于粒子滤波和卡尔曼滤波的瞳孔目标跟踪,都是面向瞳孔目标的快速检测。即在相邻的视频序列中,通过对瞳孔目标的跟踪,确定瞳孔目标的位置信息。在此位置附近还需对瞳孔进行精细分割,才能获得瞳孔的特征参数和视线参数。这种跟踪属于先跟踪后检测,可以避免在每一帧全局图像中检测瞳孔,提高了系统瞳孔检测的实时性。粒子滤波和卡尔曼滤波组合的瞳孔目标跟踪方法则是面向快速检测和精确检测的组合。这种方法的基本思想:由于人脸和瞳孔运动的随机性,很难用准确的模型来描述瞳孔运动规律;因此在瞳孔跟踪阶段,采用粒子滤波和卡尔曼滤波组合方法跟踪瞳孔。由粒子滤波完成在下一帧图像中的瞳孔目标定位,然后在此位置精确分割瞳孔。对分割的瞳孔参数采用卡尔曼滤波进行估计,以获得更加准确的、鲁棒性好的瞳孔数据。
粒子滤波和卡尔曼滤波相结合瞳孔跟踪方法流程如图6.24所示。在整个跟踪过程中,由系统硬件产生交替出现的亮瞳和暗瞳图像序列,定义相邻的四帧图像(包括两帧亮瞳图像和两帧暗瞳图像,分别为亮瞳、暗瞳、亮瞳、暗瞳)中前两帧亮瞳和暗瞳图像为前帧图像,后两帧亮瞳和暗瞳图像为后帧图像,前帧亮暗瞳图像的差分为前帧差分图像。后帧亮暗瞳图像的差分为后帧差分图像。在初始的亮瞳和暗瞳图像中,对亮暗瞳图像进行差分。再通过本书第5章介绍的瞳孔检测方法分割瞳孔,检测瞳孔目标参数,获得瞳孔目标状态参数,完成跟踪初始化。这样初始帧就成为前帧,在以后的跟踪过程就遵循前帧和后帧的定义进行瞳孔跟踪。
粒子滤波瞳孔跟踪是在前帧和后帧图像中的暗瞳图像中进行的。根据前帧检测的瞳孔目标参数,在前帧暗瞳图像上预测粒子状态,采用粒子滤波对后帧暗瞳图像上的瞳孔目标进行跟踪,确定后帧暗瞳图像上瞳孔目标的方位,即图中的瞳孔目标状态估计。粒子滤波的跟踪结果对卡尔曼滤波最终确定瞳孔目标的参数起指导作用。卡尔曼滤波瞳孔参数估计是在前帧和后帧图像中的差分图像中进行的。根据前帧图像中瞳孔目标参数,采用卡尔曼滤波预测后帧差分图像中的瞳孔参数,根据粒子滤波的跟踪结果确定预测方程,即卡尔曼滤波中的状态转移方程。通过卡尔曼滤波估计后帧差分图像中的瞳孔目标参数。卡尔曼滤波中的观测值则由粒子滤波跟踪区域的瞳孔分割获得。卡尔曼滤波的跟踪结果就是最终的瞳孔检测结果,也是下一个前帧目标参数。(www.daowen.com)
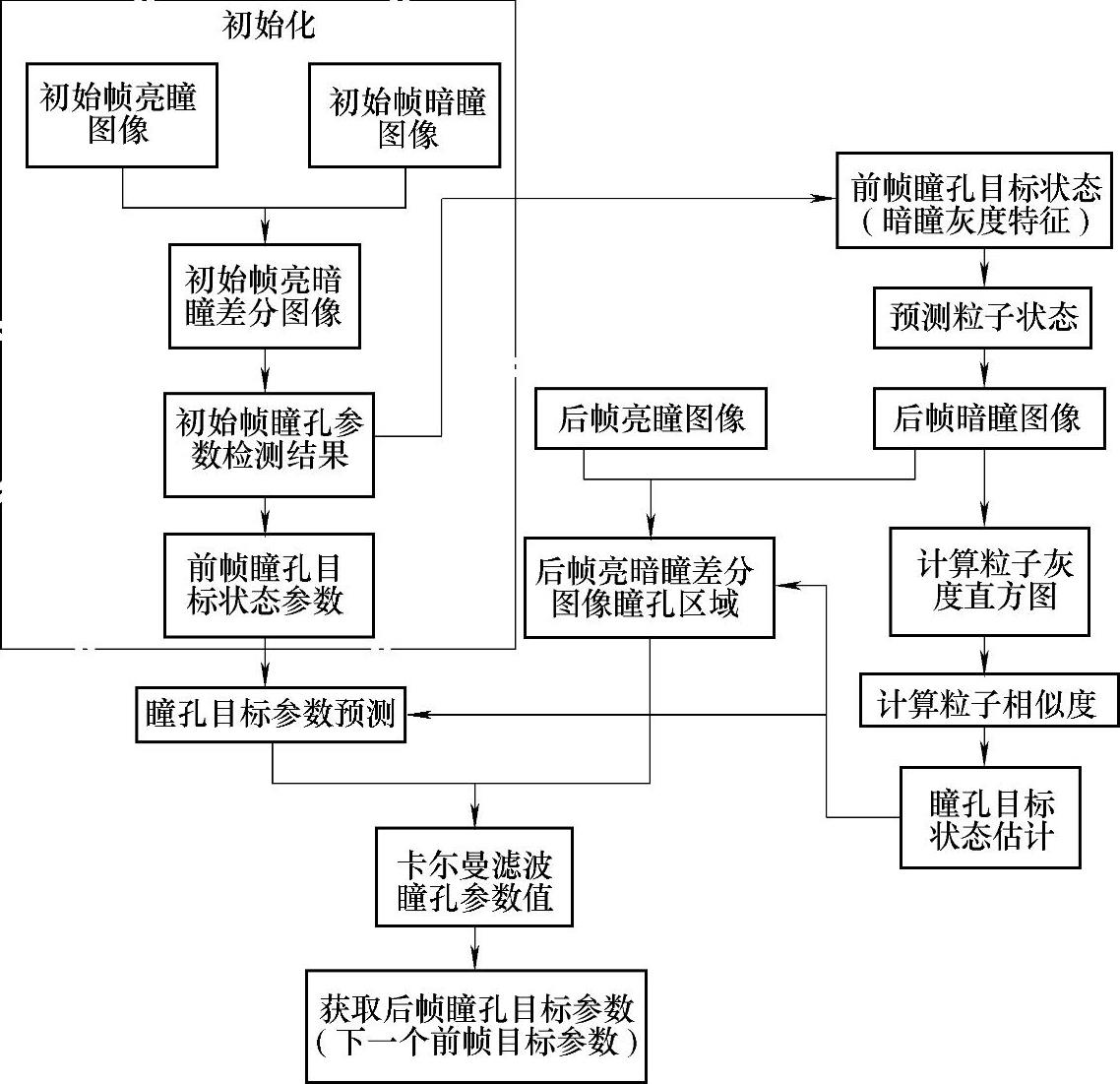
图6.24 粒子滤波和卡尔曼滤波组合瞳孔跟踪方法流程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






