1.瞳孔跟踪结果
由于瞳孔跟踪是视线追踪系统的共性问题,要求系统在不同的情况下都能有效地进行瞳孔跟踪。为了验证基于伪彩色图粒子滤波的瞳孔跟踪方法的效果,对10位使用者进行了实验。实验在室内进行,不同使用者测试的环境不相同,包括白天、晚上,晴天、阴天,室内照明灯开和关,以及有无其他强光源干扰等各种光线情况,每次实验分别记录每位使用者1000帧的跟踪结果。图6.18所示为不同使用者各种头部位置分别在163、246、648、895帧的瞳孔跟踪结果。可以看到,即使在头部转动明显的情况下,上述的瞳孔跟踪方法也能有效地跟踪瞳孔并提取相关眼睛参数。

图6.18 不同头部位置的眼睛跟踪及参数提取
图6.19所示为不同使用者在眨眼的情况下分别在156、237、665、876帧的跟踪结果。可以看到在眨眼的情况下,上述方法也能有效地跟踪瞳孔。在头部大范围移动或长时间闭眼造成瞳孔丢失的情况下需要重新对瞳孔进行全局捕捉,而当瞳孔重新出现时可以立即捕捉到瞳孔。
图6.20所示为不同使用者在佩戴眼镜的情况下分别在172、236、629、965帧的跟踪结果。可以看到,即使在镜片反光情况下,只要反光不遮盖瞳孔,上述方法也能有效地跟踪眼睛并提取眼睛参数。

图6.19 眨眼情况下的眼睛跟踪
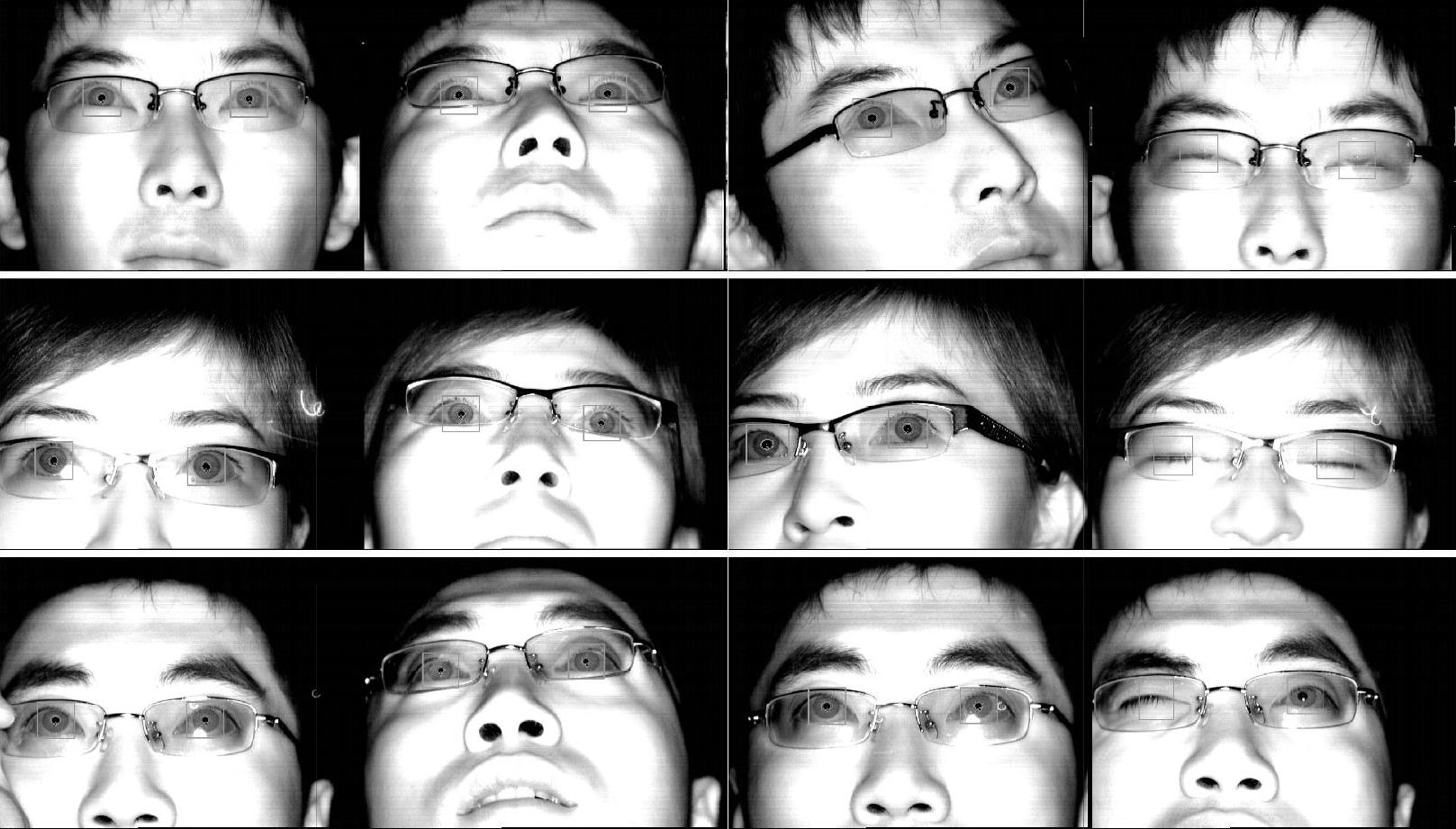
图6.20 佩戴眼镜情况下的眼睛跟踪及参数提取
图6.21所示为不同使用者在光照明显变化的情况下分别在193、223、645、942帧的跟踪结果。可以看到,即使在外部光源近距离照射人脸情况下,只要人脸反光不完全遮盖瞳孔,上述方法仍能有效地跟踪瞳孔并提取眼睛参数。同样,即使在外部光源进入摄像机拍摄范围的情况下,只要光源本身不完全遮盖瞳孔,上述方法也能有效地跟踪眼睛并提取眼睛参数。
2.实时性分析
对三种用于视线追踪系统的瞳孔跟踪方法在处理器为Core22.1G、内存为2G计算机上的VC++6.0环境下测试。用于测试的1000帧跟踪序列分为三种情况。图像分辨率760×576像素。其中,635帧为正常瞳孔稳定图像,386帧为眨眼等瞳孔部分遮挡图像,28帧为长时间闭眼造成瞳孔目标消失的图像。
实验结果统计见表6.1,可以看到,基于TCPCM粒子滤波的跟踪方法的瞳孔跟踪精确率为98.6%,达到很好的鲁棒性。尤其是在眨眼、闭眼等目标遮挡甚至消失的情况,仍然可以较好地跟踪瞳孔目标。该方法的瞳孔平均定位时间为18ms/幅,与参考文献[1,9]方法相比,在提高跟踪精确率的同时保证了跟踪速度。因为采用有选择的粒子滤波,在瞳孔目标稳定的情况下不必采用耗时的粒子滤波跟踪。所以相比于参考文献[9]中全程采用粒子滤波算法,其平均跟踪时间明显减少。
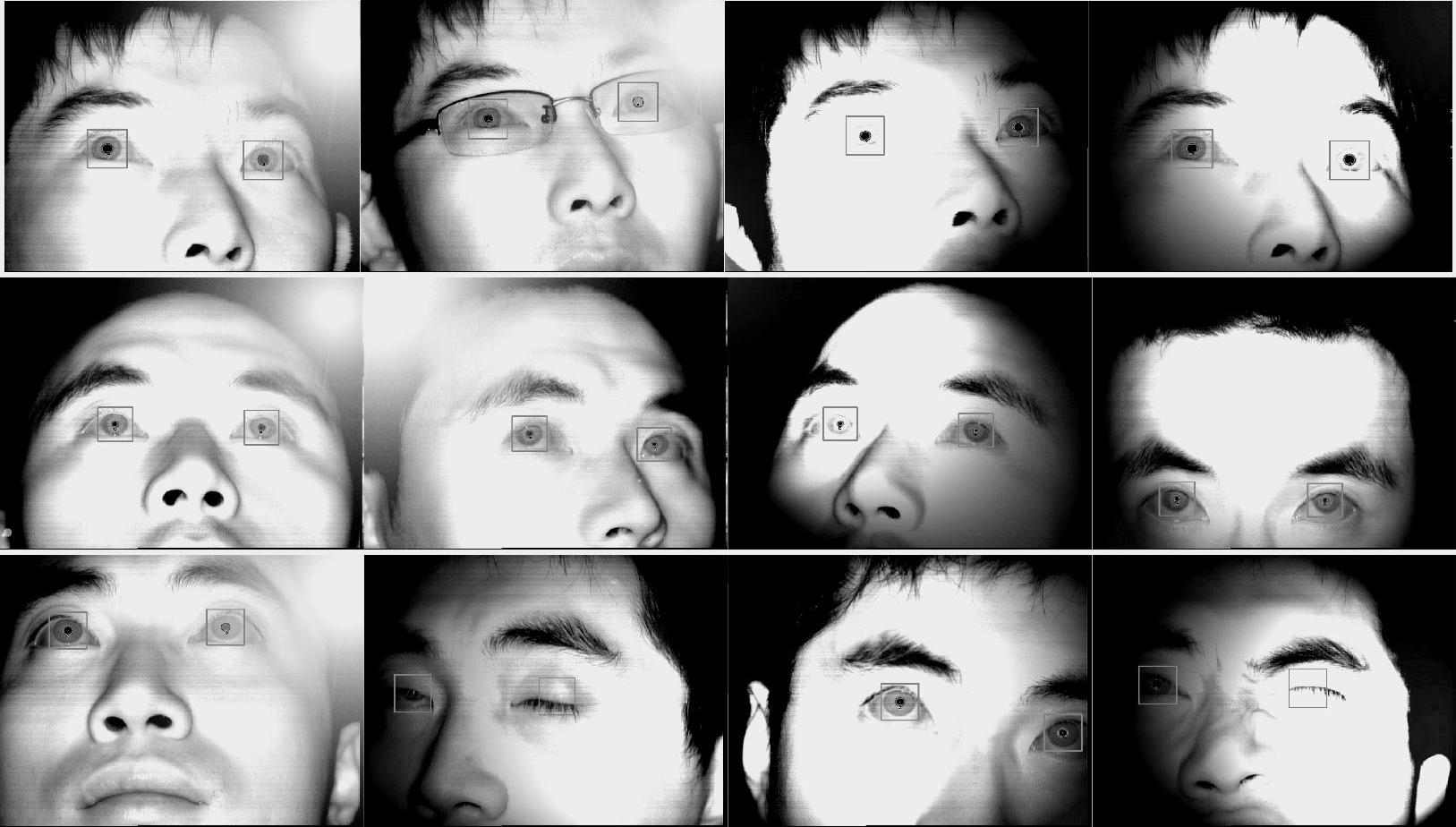
图6.21 光照明显变化情况下的眼睛跟踪及参数提取
表6.1 三种方法定位率和定位时间比较(https://www.daowen.com)

因为使用者在正常注视屏幕信息的情况下,眼睛运动幅度较小,大多数的情况下都可以在上一时刻眼睛位置的附近找到这一时刻的眼睛位置。从表6.2可以看出,由于快速特征提取处理了大部分的情况,提高了平均跟踪速度。计算复杂度较高的粒子滤波用来跟踪目标不稳定的阶段,只有在初始定位和目标丢失的情况下才使用初始目标检测。
表6.2 本文方法跟踪过程参数比较

3.跟踪性能分析
下面对三种用于视线追踪系统的瞳孔跟踪方法进行对比。用于测试的跟踪序列分为两组,每组1000帧连续图像,分别为使用者8在正常情况下和佩戴眼镜的情况下采集的。采集图像时,头部基本静止,然后逐渐运动,逐渐加大运动幅度和速度,图像分辨率为760×576像素。实验环境是在为多云的白天在室内正常荧光灯照明,无其他强光源干扰。
对以上两个测试序列,图6.22给出了跟踪结果中心点与目标真实中心点之间的方均根误差(Root of Mean Square Error,RMSE)。其中,真实位置采用手工逐帧标定。如图6.22所示,可得到如下结论:
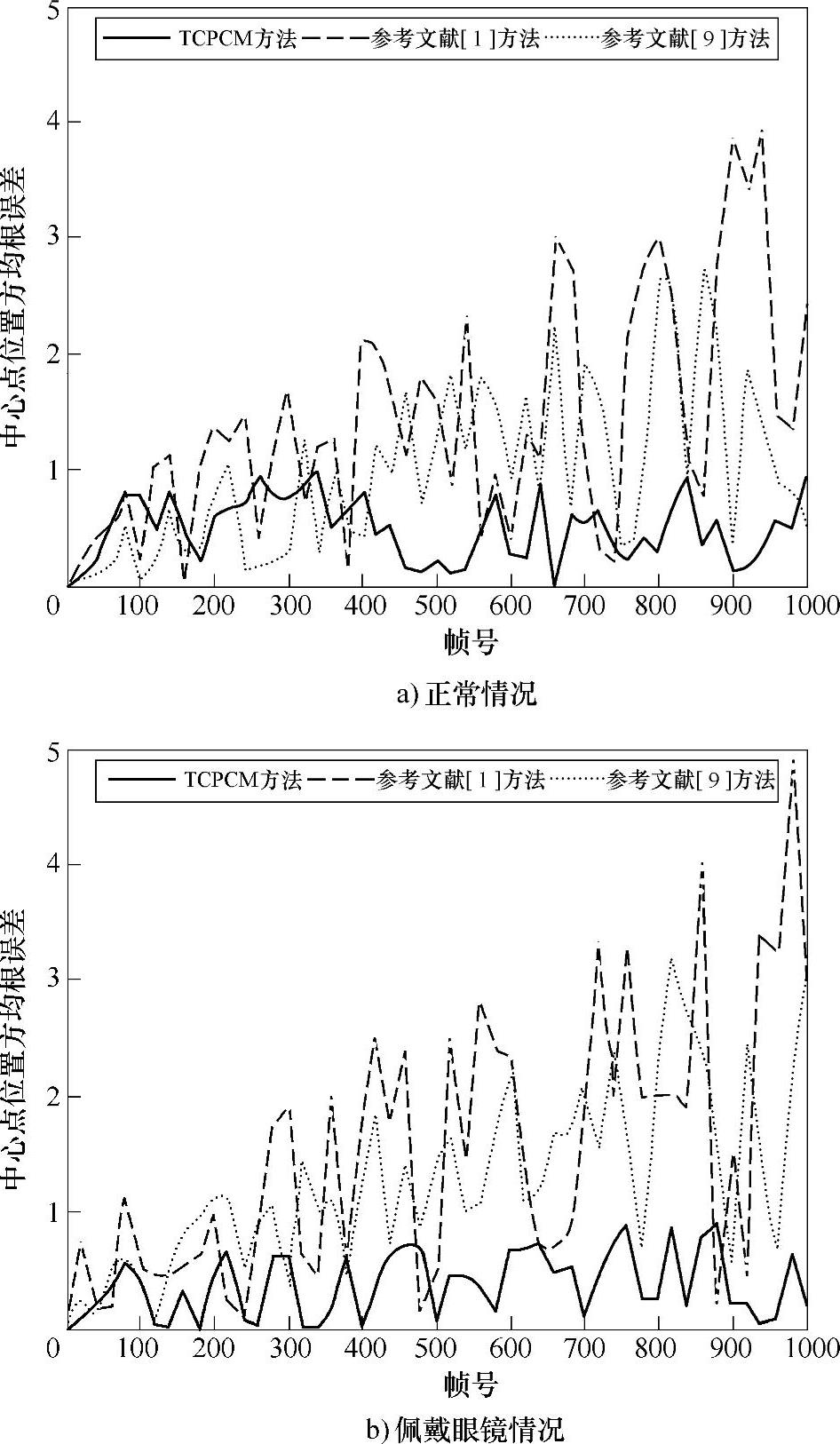
图6.22 瞳孔中心点位置方均根误差
1)最初,头部运动速度较小的情况下,三种算法都能正确跟踪目标。
2)随着跟踪的进行,参考文献[1,9]中的方法虽仍能跟踪目标一段时间,但结果已明显不准确。而基于TCPCM粒子滤波的瞳孔跟踪方法,在整个跟踪过程中都能一直保持对眼睛的稳定跟踪能力。
3)在使用者佩戴眼镜的情况下,参考文献[1,9]中的方法虽仍能跟踪目标,但结果RMSE明显增大。而TCPCM粒子滤波方法在使用者佩戴眼镜的情况下,能保持对瞳孔的稳定跟踪,RMSE未见明显增大。
4)相对于参考文献[1]中组合卡尔曼滤波与均值漂移的方法和参考文献[9]中的粒子滤波方法,TCPCM粒子滤波方法能更为准确和稳定地跟踪目标,其跟踪结果与目标真实位置的误差最小,完全能满足实时视线追踪对眼睛跟踪的精度要求。
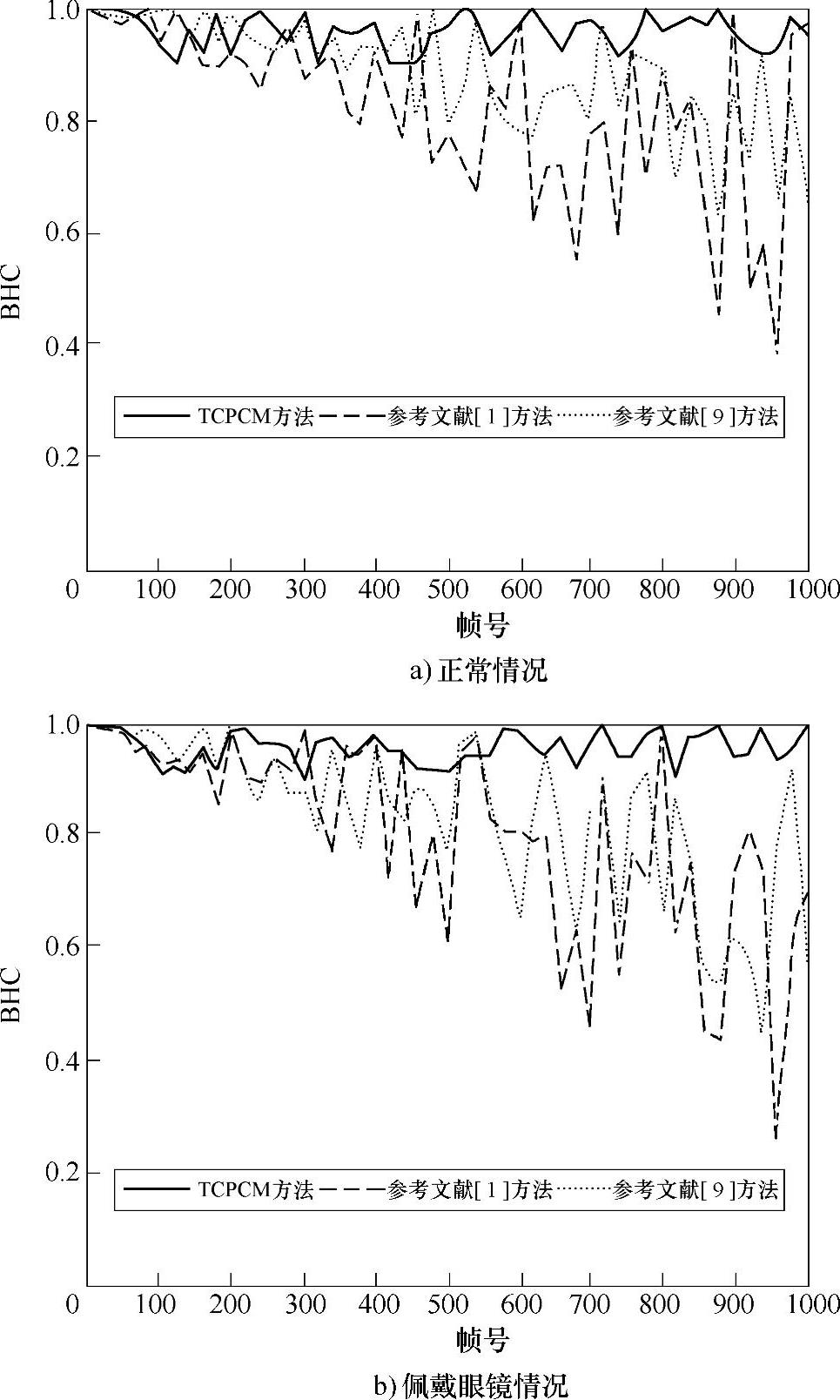
图6.23 目标模型BHC对比
对以上两个测试序列,图6.23给出了跟踪过程中三种算法的目标模型与真实目标模型的Bhattacharyya系数(Bhattacharyya Coefficient,BHC)对比。真实目标模型采用手工逐帧标定并计算。由于BHC反映了两个概率分布的匹配程度,因此如果每帧中所采用的目标模型与真实模型越接近,则最终算法将越具有更好的跟踪能力和定位精度。由图可见,参考文献[1]中的方法与真实目标模型的差异很快变大,最终导致目标丢失。参考文献[9]中的方法在后期目标与背景直方图混杂的时候,所采用的目标模型与真实模型的差异也将很快变大,从而丢失目标。而TCPCM粒子滤波方法在整个跟踪过程中,都能较为准确地更新目标模型,具有与真实目标模型最为接近的匹配度,因此具有最好的跟踪性能。这一分析和结论也与前面的实际跟踪过程完全吻合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




