卡尔曼滤波建立在线性代数和隐马尔可夫(Hidden Markov)模型上。其基本动态系统可以用一个马尔可夫链表示,该马尔可夫链建立在一个被高斯噪声(即正态分布的噪声)干扰的线性算子上的。系统状态可以用一个实矢量表示。随着离散时间的每一次增加,线性算子就会作用在当前状态上,产生一个新的状态,并会带入一些噪声,同时系统的控制信息也会被加入。同时,另一个受噪声干扰的线性算子产生这些隐含状态的可见输出。卡尔曼滤波器的模型如图6.1所示,图中圆圈代表矢量(如u),正方形代表矩阵(如h),星形代表高斯噪声(如v),高斯噪声对应的协方差矩阵在星形的右下角标出(如R),k-1、k、k+1分别代表上一时刻、当前时刻和下一时刻。其中,R代表了观测信息的质量,F为状态转移阵,将过去k-1时刻状态和现在的k时刻状态联系起来;B代表控制输入u(k)的增益矩阵;H为观测矩阵,表示状态变量X(k)对测量变量H(k)的增益。
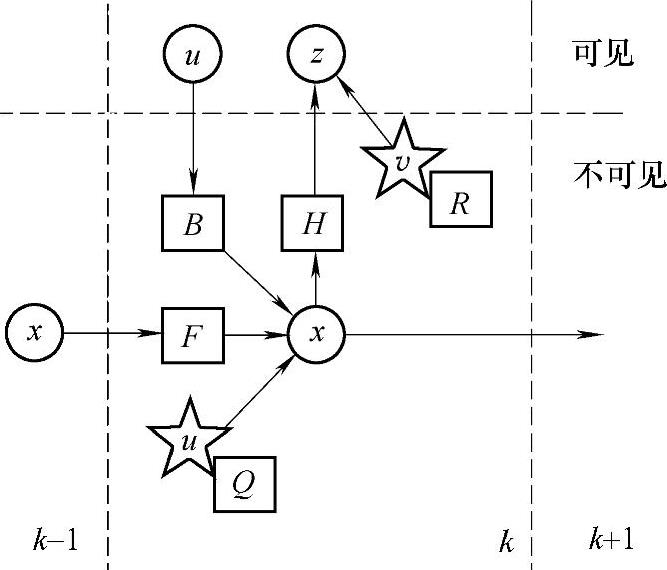
图6.1 卡尔曼滤波模型
卡尔曼滤波是随机信号估计的算法之一,采用状态空间法在时域内设计滤波器,避免了在频域内对信号功率谱进行分解的麻烦。同时卡尔曼滤波算法采用递推计算方式,将实时观测信息和历史信息融合于估计值中,从而不必存储时间过程中的观测量。在状态空间方法中,引入了状态变量和状态空间概念。状态是比信号更广泛、更灵活的概念,它非常适合处理多变量系统和信号估计问题,信号可视为状态或状态的分量。系统状态变量是能体现系统特征、特点和状况的变量。状态空间方法的关键技术包括状态空间模型和状态估计方法。状态方程是描写状态变化规律的模型,它表示了相邻时刻的状态转移变化规律。观测方程描写状态观测的信息,通常含有观测噪声且只能对部分状态变量进行观测。卡尔曼滤波是根据观测信息求系统状态的最优估计。
6.1.1.1 离散卡尔曼滤波
1.离散卡尔曼滤波基本方程
设k时刻被估计状态X(k)受系统噪声序列W(k-1)驱动,驱动机理由下述状态方程描述:
X(k)=ϕ(k,k-1)X(k-1)+Γ(k-1)W(k-1) (6.1)
对X(k)的量测满足线性关系,量测方程为
Z(k)=H(k)X(k)+V(k) (6.2)
式中,ϕ(k,k-1)为k-1时刻至k时刻的一步转移矩阵;Γ(k-1)为系统噪声驱动矩阵;H(k)为量测矩阵;V(k)为量测噪声序列;W(k)为系统激励噪声序列。同时,W(k)和V(k)满足
E[W(k)]=0,Cov[W(k),W(j)]=E[W(k)kW(j)T]=Q(k)σkj (6.3)
E[V(k)]=0,Cov[V(k),V(j)]=E[V(k)V(j)T]=R(k)σkj (6.4)
Cov[V(k),V(j)T]=0 (6.5)
式中,Q(k)为系统噪声序列的方差距阵,假设为非负定阵;R(k)为量测噪声序列的方差距阵,假设为正定阵。若已知k时刻的量测值为Z(k),则X(k)的估计X(k)按下述步骤求解。
(1)估计误差方程
设k时刻状态矢量为X(k),估计值为 ,误差矢量为e(k)=X(k)-
,误差矢量为e(k)=X(k)- ,则估计误差方差矩阵为
,则估计误差方差矩阵为

估计误差方差为

卡尔曼滤波根据测量矢量Z(k),求出状态矢量X(k)的最佳估计值X ,使得估计误差的方差ξ(k)为最小。
,使得估计误差的方差ξ(k)为最小。
(2)预测误差方差矩阵
根据估计方差最小理论,k+1时刻的状态矢量估计值 ,等于状态矢量X(k+1)在给定{Z(1),Z(2),…,Z(k)}时的条件均值,即
,等于状态矢量X(k+1)在给定{Z(1),Z(2),…,Z(k)}时的条件均值,即
 (www.daowen.com)
(www.daowen.com)
将此式带入状态方程,其中E{X(k+1)Z(1)…Z(k)}=0,得到状态矢量X(k)在k+1时刻的最优预测矢量,即

同理,可以得到观测矢量的最优预测矢量为

联立求解,得到估值误差方差矩阵为
P(k+1k)=ϕ(k+1,k)P(k)ϕT(k+1,k)+Q(k) (6.11)
(3)滤波估值方程
在对k时刻状态矢量X(k)进行预测后,根据实际得到的k+1时刻的观测值Z(k+1)对预测值X 进行修正,即可得到k+1时刻的状态矢量X(k+1)的滤波估值X(k+1),有
进行修正,即可得到k+1时刻的状态矢量X(k+1)的滤波估值X(k+1),有

式中,K(k+1)称为增益矩阵,有
K(k+1)=P(k+1k)HT(k+1)[H(k+1)P(k+1k)HT(k+1)+R(k)]-1 (6.13)得到滤波误差方差矩阵为
P(k+1)=(I-K(k+1)H(k+1))P(k+1k) (6.14)
在一个滤波周期内,从卡尔曼滤波使用系统信息和量测信息的先后次序来看,卡尔曼滤波具有两个明显的信息更新过程——时间更新过程和量测更新过程。式(6.9)说明了根据k-1时刻的状态估计预测k时刻状态估计方法,式(6.11)对这种预测的质量作了定量描述。这两个公式的计算仅使用了与系统动态特性有关的信息,如一步转移阵、噪声驱动阵、驱动噪声的方差阵等。从时间的推移过程来看,这两个公式将时间从k-1时刻推进到k时刻。所以,这两个公式描述了卡尔曼滤波的时间更新过程。其余各式用来计算对时间更新值的修正量,这些修正量由时间更新的质量优劣P(k,k+1)、量测信息的质量优劣R(k)、量测与状态的关系H(k)及具体的量测值Z(k)所确定。所有这些方程围绕着如何合理利用Z(k),描述了卡尔曼滤波的量测更新过程。卡尔曼滤波的时间更新过程和量测更新过程如图6.2和图6.3所示。卡尔曼滤波具有两个计算流程——滤波计算流程和增益计算流程。
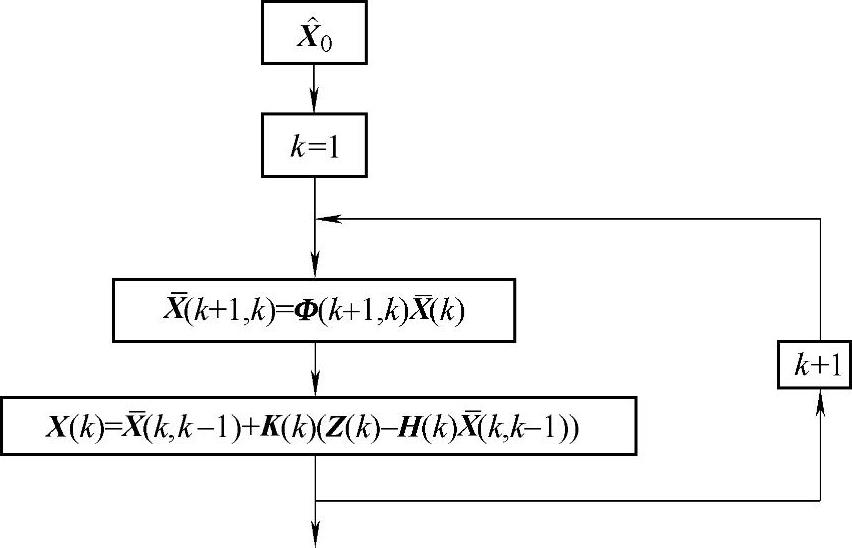
图6.2 卡尔曼滤波计算流程
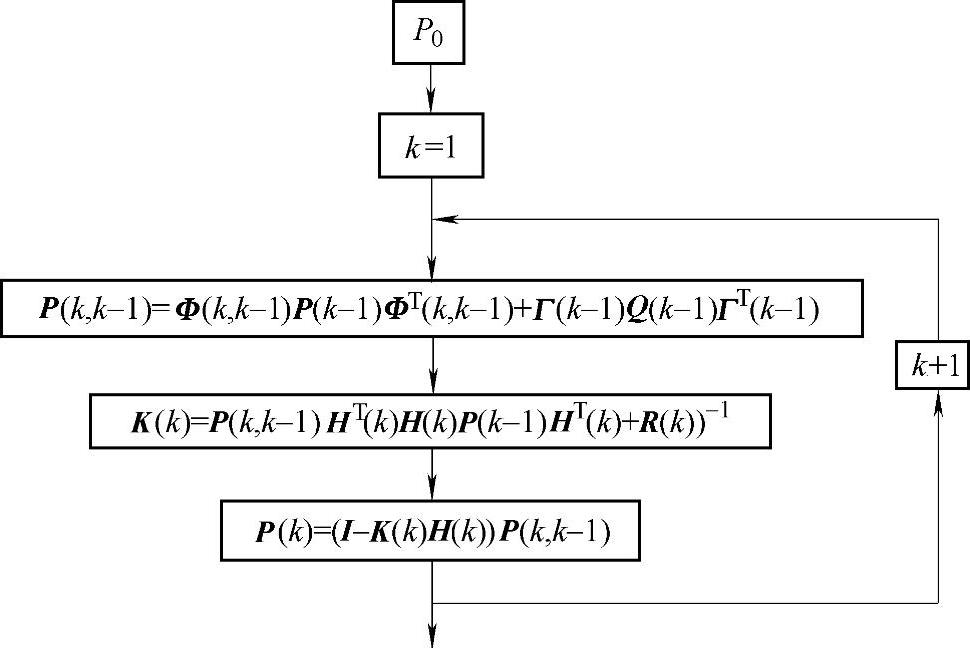
图6.3卡尔曼滤波增益流程
其中,增益计算流程是独立计算流程,而滤波计算流程依赖于增益计算流程。
2.滤波状态和测量初值选取
卡尔曼滤波是一种递推算法,启动时必须先给定初值X 和P0。如果选取
和P0。如果选取 ,则滤波过程中估计始终无偏,即
,则滤波过程中估计始终无偏,即 。如果开始并不了解初始状态的统计特性,令
。如果开始并不了解初始状态的统计特性,令

式中,α为很大的正数,在此情况下滤波器不能保证是无偏的。由于P0≠CX0,所以实际的估计均方误差也不一定是最小的。如果系统是一致完全随机可控和一致完全随机可观测的,则卡尔曼滤波一定是一致渐进稳定的。即随着滤波步数的增加,盲目选取的滤波初值 和P0的影响将逐渐减弱直至消失,估计逐渐趋向无偏,估计的均方误差也逐渐和P0=CX0时的结果保持一致。
和P0的影响将逐渐减弱直至消失,估计逐渐趋向无偏,估计的均方误差也逐渐和P0=CX0时的结果保持一致。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





