1.瞳孔可能区域检测
(1)瞳孔可能区域判断
初步判定眼睛区域以后,还要根据亮瞳、暗瞳、差分三幅图像中瞳孔先验知识对差分图像做滤波以得到更准确的瞳孔区域。根据大量的实验,发现瞳孔区域主要有以下两个特征:
1)在暗瞳图像中,暗瞳孔很暗,像素灰度接近0。其他脸部区域在红外光源照射下灰度值比瞳孔区域高,即使最暗的眉毛和鼻孔由于对红外光线有漫反射作用,其灰度也通常不为0。
2)亮瞳现象是由于瞳孔与光源的特定位置造成的,亮暗瞳区域具有明显的灰度差,这是其他区域所不具备的特征,也是亮暗瞳差分方案定位瞳孔的主要依据。
根据上述瞳孔区域特征进行瞳孔区域定位,可以有如下判定:差分图像中,同时满足暗瞳像素灰度小于灰度阈值thres1和差分图像像素灰度大于差分图像瞳孔灰度阈值thres2两个条件的像素的集合构成差分图像中可能的瞳孔区PupilC,如图5.24所示。
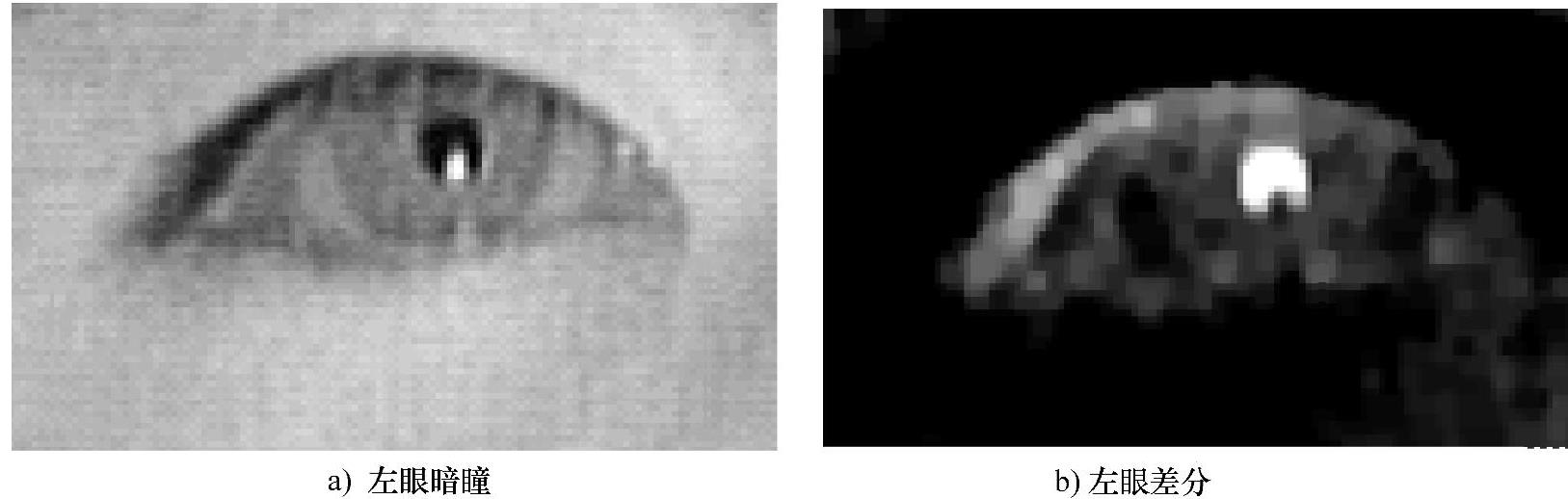
图5.24 瞳孔检测区域
(2)阈值的确定
对于上述阈值thres1和thres2,采用最大类间方差法(即Otsu[1]法)确定阈值thres1和thres2。Otsu法是一种自适应阈值分割方法,它按图像的灰度特性,将图像分成背景和目标两部分。类间方差最大意味着错分概率最小。对于差分图像人眼区域,前景(即瞳孔)和背景的分割阈值记为T。属于前景的像素点数占整幅图像的比例记为W0,其平均灰度μ0;背景像素点数占整幅图像的比例为W1,其平均灰度为μ1。图像的总平均灰度记为μ,类间方差记为g。假设图像大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则
由以上各式得到等价式
g=W0W1(μ0-μ1)2 (5.32)采用遍历方法得到使类间方差最大的阈值T,即为所求的阈值。由阈值分割得到瞳孔候选目标,如图5.25所示。

图5.25 瞳孔候选目标
2.瞳孔区域形状滤波(https://www.daowen.com)
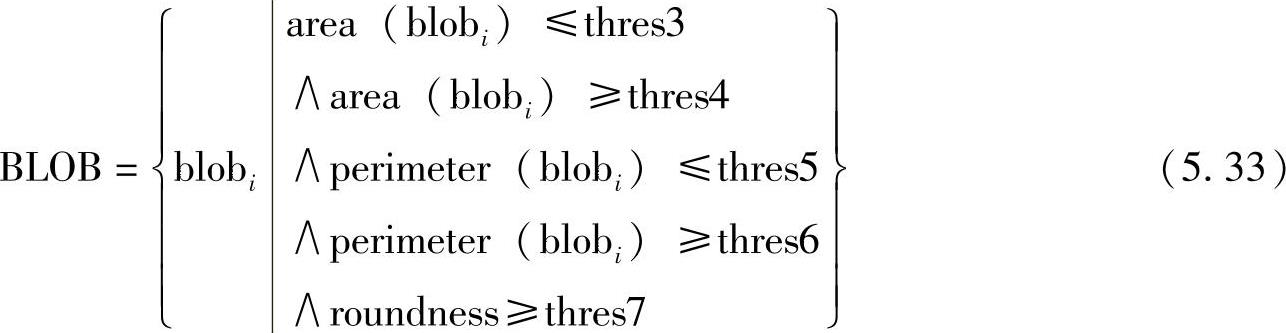
在上一步骤基础上,得到了瞳孔的潜在区域,即瞳孔可能的区域块。由于光照等各种因素的影响,除瞳孔目标外,还残存有其他干扰区域块。为了分割出真正的瞳孔目标,还需进行瞳孔形状大小分析。即分析区域块的面积、周长和圆形度等指标,将明显不符合瞳孔要求的区域块舍去,从而达到分割瞳孔的目的。滤波规则如下:
1)瞳孔区域面积应小于一定的阈值thres3,大于一定的阈值thres4;
2)瞳孔区域周长应小于一定的阈值thres5,大于一定的阈值thres6;
3)瞳孔区域圆形度应大于一定阈值thres7。
上述过程公式表述如下:
圆形度是圆形目标的重要特征,其定义为

式中,S为目标的面积,L为目标的周长。由式子可以得出,当图像中的目标区域为圆时,R有最大值1;而对其他任何形状区域,R是小于1的小数,且R值越小,目标区域的形状也就越复杂。如正方形目标区域的圆形度近似为0.785,正三角形目标区域的圆形度近似为0.615。可见,通过分析目标的圆形度,可大体获得目标区域的形状。但是由于瞳孔区域受到角膜反射区域的隐形,瞳孔区域不会是一个标准的圆形,它的圆形度也会受到影响。仍然通过大量的实验,可以确定瞳孔区域的圆形度大概会大于一定阈值thres7,从而用来确定瞳孔区域。
如图5.26所示,第2块区域面积和周长都过小,不符合瞳孔区域的要求,所以第2块区域不是瞳孔;第1块区域圆形度过低,区域结构复杂,也不是瞳孔区域;第3块区域面积和周长符合要求,并且圆形度也很大,所以判断第3块区域为瞳孔区域。
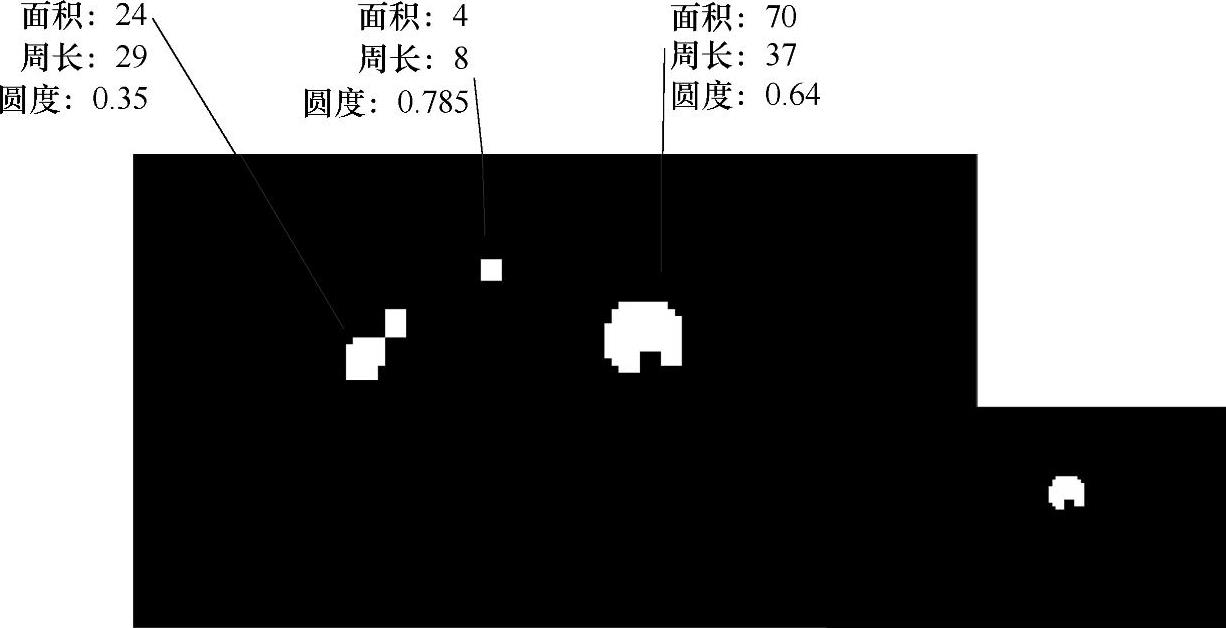
图5.26 瞳孔区域块map D
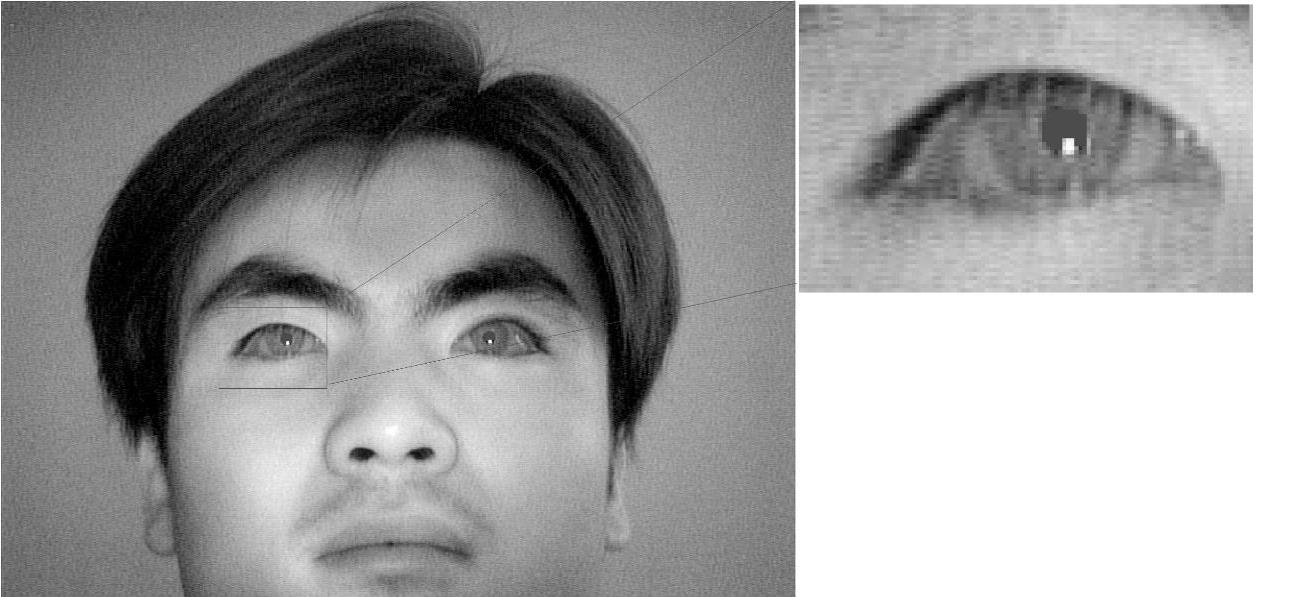
图5.27 瞳孔目标区块在暗瞳图像上的表示
3.瞳孔的椭圆拟合
差分图像中瞳孔目标确定后,进行瞳孔边缘检测。对检测到的瞳孔边缘采用最小二乘法拟合瞳孔椭圆,定位瞳孔中心。最小二乘法通过最小化误差的平方和寻找数据的最佳函数匹配。可以简便求得拟合目标的未知数据,并使所求数据与实际数据之间误差的平方和最小。拟合的瞳孔椭圆区域和瞳孔椭圆中心如图5.28所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






