【摘要】:当视线追踪系统中的摄像机为短焦宽视野摄像机时,这种视线追踪系统允许使用者头部在一定范围内旋转和移动。由于头部在摄像机摄取的图像中只占一部分,直接在图像中检测眼睛有很大难度。在一幅有着较复杂背景的人脸图像中,直接检测人眼,即使在主动红外光源的亮暗瞳差分方案下,也具有相当大的挑战性。2)在暗瞳图像上,采用AdaBoost算法进行人脸检测,定位人脸区域。9)根据检测到的瞳孔中心和普尔钦斑中心,计算平面视线参数。
当视线追踪系统中的摄像机为短焦宽视野摄像机时,这种视线追踪系统允许使用者头部在一定范围内旋转和移动。由于头部在摄像机摄取的图像中只占一部分,直接在图像中检测眼睛有很大难度。这种情况下的视线参数检测利用了这样一个事实,即在摄像机视野中,定位人脸要比定位人眼容易。在一幅有着较复杂背景的人脸图像中,直接检测人眼,即使在主动红外光源的亮暗瞳差分方案下,也具有相当大的挑战性。这种情况下的视线参数检测需要采用一种由粗及精的平面视线参数提取策略,方法流程如图5.14所示,说明如下:
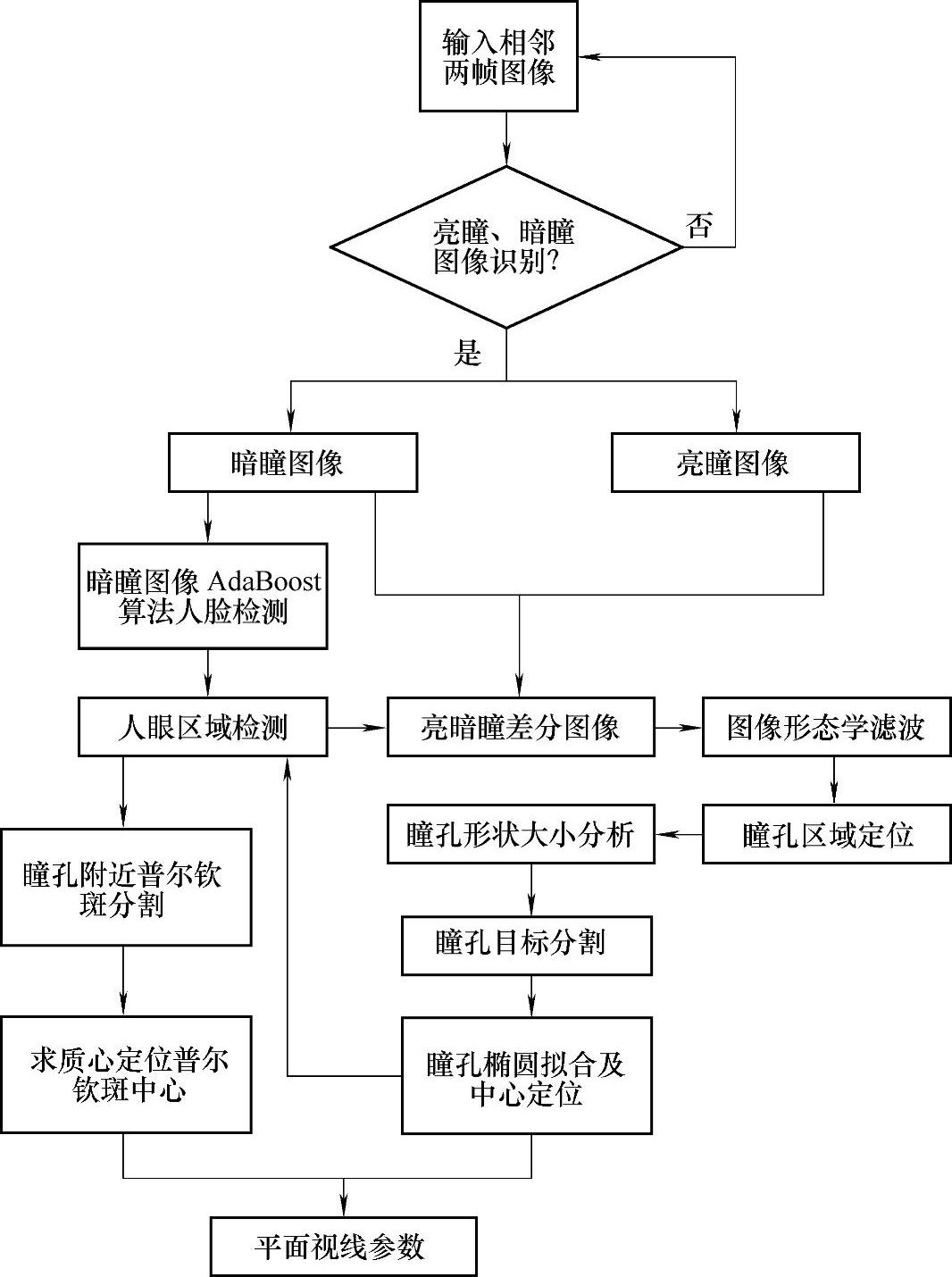
图5.14 平面视线参数检测流程图
1)采集相邻两帧图像,判断哪一帧是亮瞳图像,哪一帧是暗瞳图像。亮暗瞳图像相减获得差分图像。差分图像中瞳孔目标突出。
2)在暗瞳图像上,采用AdaBoost算法进行人脸检测,定位人脸区域。
3)在定位的人脸区域结合人脸五官分布的先验知识,继续采用AdaBoost算法定位眼睛区域。
4)对差分图像进行形态学滤波,滤除杂散干扰并对瞳孔目标修形。(https://www.daowen.com)
5)根据暗瞳图像上检测标注的眼睛区域,在差分图像的相应区域采用投影法定位瞳孔区域。
6)对瞳孔区域,采用形态分析方法排出伪瞳孔目标,确定瞳孔目标。
7)对瞳孔目标进行边缘检测、边界拟合,进而计算瞳孔中心图像坐标。
8)在暗瞳图像上的瞳孔附近检测光源的角膜反射(普尔钦斑),并根据质心计算普尔钦斑中心。
9)根据检测到的瞳孔中心和普尔钦斑中心,计算平面视线参数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





