基于瞳孔中心-角膜反射的视线追踪系统普遍采用亮暗瞳差分方案,通过控制近摄像机光轴的红外光源的交替亮灭,在序列视频图像的相邻两帧中分别产生亮瞳和暗瞳图像,通过亮瞳图像和暗瞳图像差分,可以有效地突出瞳孔目标,瞳孔目标的检测是在差分图像上进行的。因此在视线追踪系统摄像机采集的序列人脸图像中,在相邻两帧中准确区分亮瞳和暗瞳图像是参数提取过程正常运行的前提,也就是说,在眼睛特征提取和视线参数检测之前,必须有效区分采集相邻帧图像中哪一帧是亮瞳图像,哪一帧是暗瞳图像。我们经过大量实验,得到以下关于序列图像中亮瞳图像和暗瞳图像规律:
1)暗瞳区域灰度值个体差异很小,是一个比较稳定的瞳孔特征;
2)亮瞳区域的灰度值个体差异较大,但其与暗瞳区域的灰度差值在光源固定的前提下不会小于一个固定阈值。
根据以上规律,可以从视频序列连续两帧中判断亮暗瞳图像,从而进行差分。
设ImA、ImB是连续的两帧图像,ImAi,j、ImBi,j分别是图像ImA、ImB上的点的灰度值,根据上述事实得出如下规则:(https://www.daowen.com)

式中,Ib、Id分别表示亮瞳和暗瞳图像; 为ImA减去ImB像素灰度值的总和;∑|ImBi,j-ImAi,j|为ImB减去ImA像素灰度值的总和。由于亮瞳孔灰度值较高,暗瞳孔灰度值较低,亮瞳图像减去暗瞳图像会产生较多的非0像素点;暗瞳图像减去亮瞳图像会产生较多灰度值为0的像素点。如果差分图像像素灰度和∑|ImAi,j-ImBi,j|>>∑|ImBi,j-ImAi,j|≈0,则判断ImA为亮瞳图像,ImB为暗瞳图像,如果差分图像像素灰度和∑|ImBi,j-ImAi,j|>>∑|ImAi,j-ImBi,j|≈0,则判断ImB为亮瞳图像,ImA为暗瞳图像。亮瞳、暗瞳和差分图像如图5.1所示。
为ImA减去ImB像素灰度值的总和;∑|ImBi,j-ImAi,j|为ImB减去ImA像素灰度值的总和。由于亮瞳孔灰度值较高,暗瞳孔灰度值较低,亮瞳图像减去暗瞳图像会产生较多的非0像素点;暗瞳图像减去亮瞳图像会产生较多灰度值为0的像素点。如果差分图像像素灰度和∑|ImAi,j-ImBi,j|>>∑|ImBi,j-ImAi,j|≈0,则判断ImA为亮瞳图像,ImB为暗瞳图像,如果差分图像像素灰度和∑|ImBi,j-ImAi,j|>>∑|ImAi,j-ImBi,j|≈0,则判断ImB为亮瞳图像,ImA为暗瞳图像。亮瞳、暗瞳和差分图像如图5.1所示。
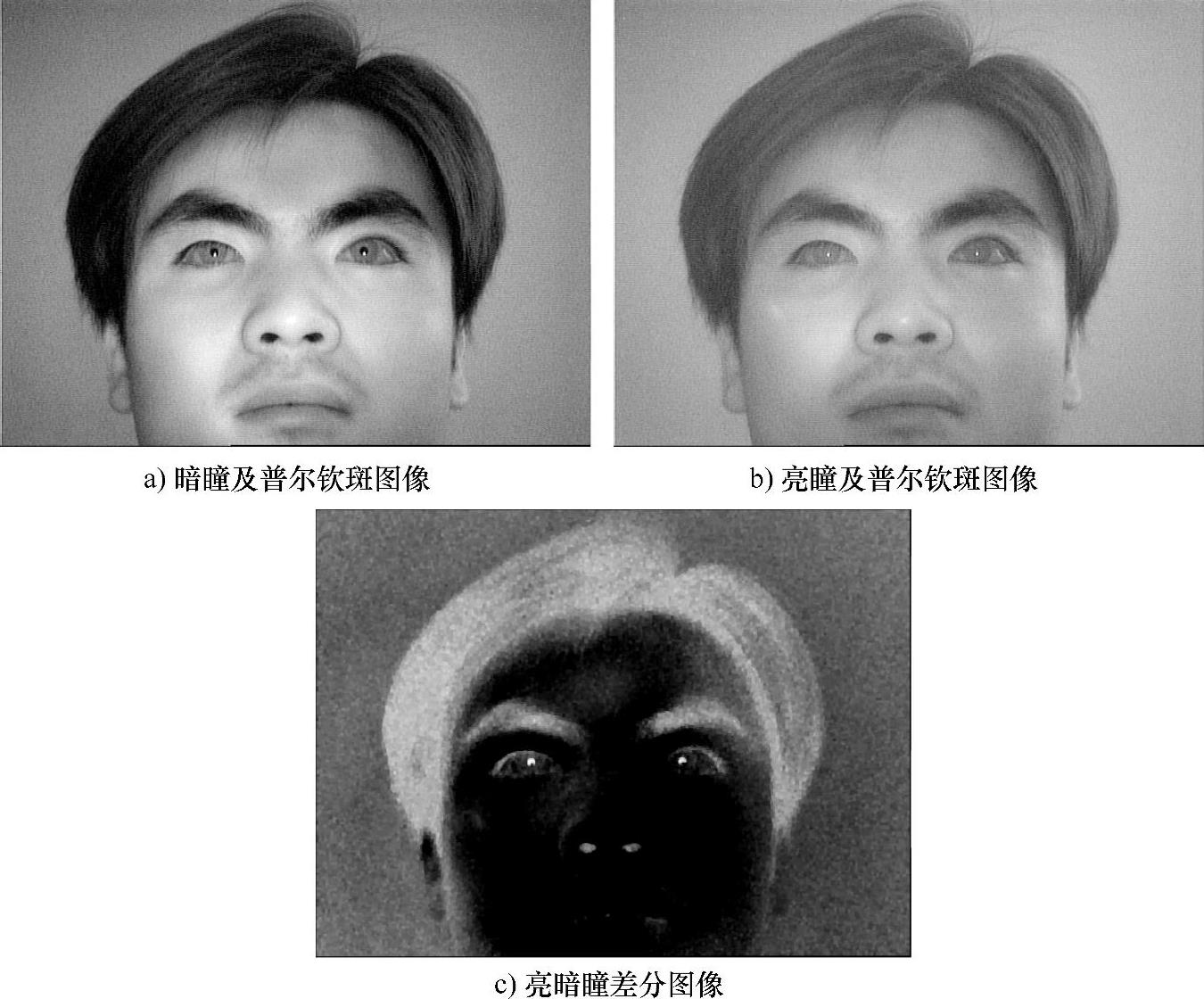
图5.1 暗瞳、亮瞳和差分图像
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





