一些彩色图像滤噪算法工作在RGB彩色空间或者YcbCr彩色空间。但是在这些空间中,亮度分量和色度分量不是独立的,改变其中之一会带来亮度分量和色度分量的同时改变。因此,在RGB彩色空间或者YcbCr彩色空间中,图像平滑的同时会产生新的颜色,带来颜色混乱。CIELAB彩色空间通过径向距离和角度分别表示颜色的饱和度和色调。这使得在CIELAB彩色空间中更容易操作亮度分量和保持颜色的一致性。
1.改进的双边滤波
对图4.24a所示图像的双边滤波滤噪结果如图4.26所示。可以看出,随着σr和σd的增大,噪声被去除的同时图像也变得模糊了。尽管双边滤波可以在一定程度保持图像的高频细节,但是仍然会使图像变模糊。为了进一步降低双边滤波对图像清晰度的影响。本文提出对双边滤波的一种改进算法。主要改进如下:
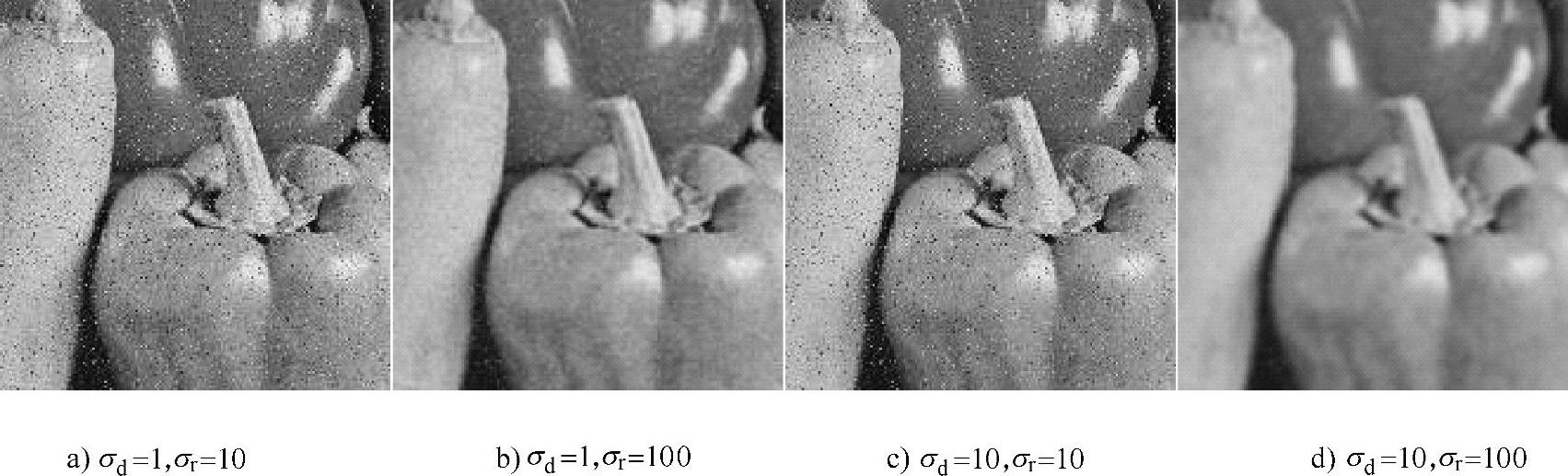
图4.26 对图4.24a双边滤波滤噪结果
(1)利用4.2.2.1节中边缘检测得到map A,通过map A估计噪声范围,仅对map A中等于1的像素点做双边滤波,见式(4.105)。其中,f(xi,j)为M×N的原图像,hb(xi,j)为双边滤波输出图像。
(2)噪声的污染点本身的值不具有参与平滑的价值,将其加权系数置0,见式(4.106)。其中,s(ε,x)表示彩色空间矢量f(ε)与f(x)之间的相似度,c(ε,x)表示平面坐标ε与x之间的相似度。
(3)将噪声的污染点f(xi,j)与附近点f(ε)之间的彩色空间距离修改为f′(xi,j)与点f(ε)之间的彩色空间距离,f′(xi,j)为f(xi,j)空心邻域的CIELAB彩色空间矢量均值,见式(4.109)。双边滤波输出图像hb(xi,j)修改为式(4.107)。kb(x)为归一化因子,见式(4.108)。
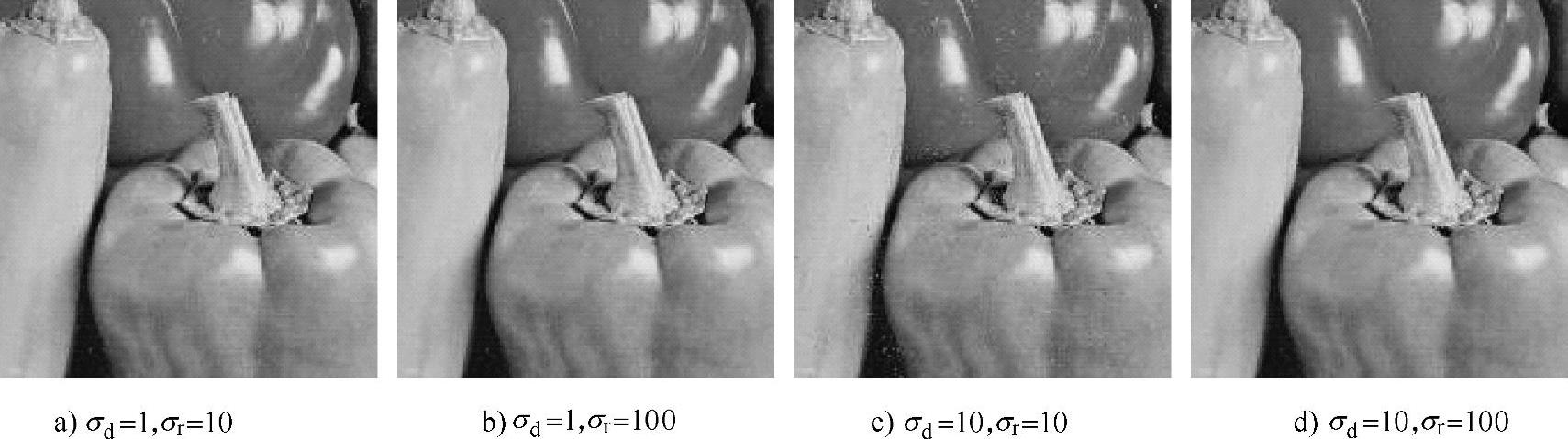
对图4.24a所示图像用上述方法滤噪结果如图4.27所示。可以看出随着σr和σd的增大,噪声被更好去除的同时,图像的清晰度未见明显损失。
 (www.daowen.com)
(www.daowen.com)
图4.27 对图4.24a所示图像改进的双边滤波滤噪结果
2.彩色图像滤噪后增强
尽管在上面的滤噪过程中,彩色图像的边缘信息被很大程度地保留,但是现实系统中得到的彩色图像仍然会有一定程度的模糊。造成图像模糊的原因主要有以下几个:
1)目标位置移动造成的镜头聚焦不准;
2)目标移动引起的成像模糊;
3)光学镜头的非理想性引起的成像模糊,尤其在图像的四角位置。
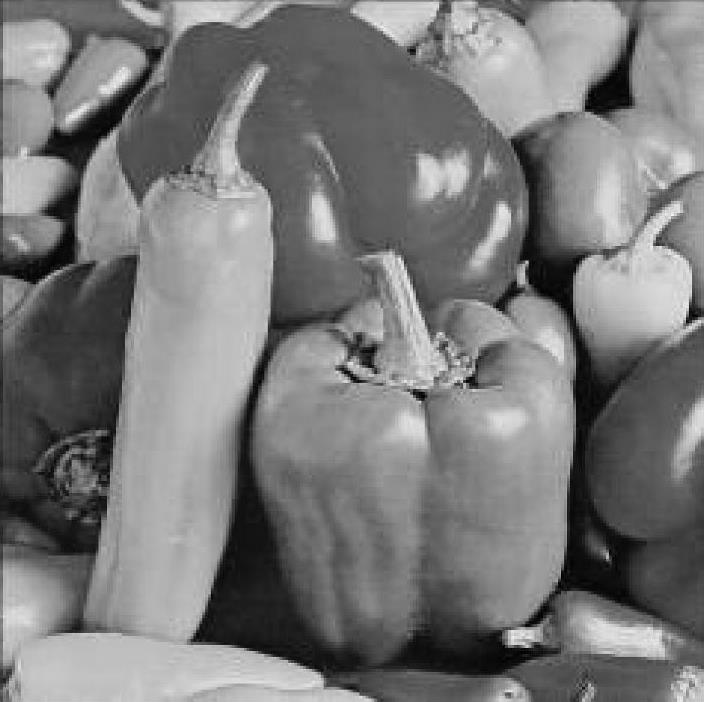
图4.28 对图4.27d所示图像增强后的结果(算法最终结果)σd=10,σr=100
因此彩色图像滤噪后的增强环节是必要的。这里可以采用一种简单有效的彩色图像增强方法[31]。利用前面得到的边缘滤波后的边缘图map B,仅对对应边缘点的亮度分量进行增强。由于上文提出的边缘检测算法得到的不是单像素边缘,事实上是包含边缘两边很小区域的“边缘邻域”。在“边缘邻域”内扩大边缘两侧的亮度差,就可以达到增强图像的效果。具体做法如下:利用1.中边缘滤波得到的边缘图map B,仅对边缘图map B中等于1的像素点做增强,其中ϕ为亮度值的增强比例。大于邻域均值的点按比例增加其亮度,小于邻域均值的点按比例减小其亮度,见式(4.110)、式(4.111)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




