由于单摄像机系统中摄像机数量的限制,使得视线追踪系统对于用户头动带来的影响束手无策,为此研究人员将注意力逐渐转向了多摄像机多光源系统的研制。通过多摄像机系统可以获得眼球的三维特征,进而获取三维眼球视线参数,可以根据眼球的空间几何结构模型计算视线方向。多摄像机多光源系统总体可分为两类:
1)多摄像机组成的瞳孔检测和头部运动补偿系统;
2)多摄像机组成的机器视觉系统。
第一种是在单摄像机系统的基础上改进而来的,通过额外增加一个摄像机来采集用户头动情况,以提取用户头部运动的轨迹信息,进而进行头部运动补偿,以消除其对视线追踪系统中计算视线追踪精度的影响。
第二种则采用了较为不同的设计方式。通过使用两个完全相同的摄像机组成的机器视觉系统进行眼部特征检测和视线方向计算。
多摄像机多光源系统是视线追踪系统技术发展的一个新的方向。尤其是机器视觉技术的引入,可以解决单摄像机系统对用户头动无能为力的问题。但多摄像机多光源系统依然有不足,其复杂的硬件配置和设计、繁琐的系统标定和预处理及内容庞大的程序算法都对其走向实际应用提出了挑战。下面介绍几个典型的多摄像机多光源典型系统。
(1)美国Rensselaer Polytechnic Institute的朱志伟(Zhu ZhiWei)等研发的视线追踪系统[25]
系统有两个安装在显示器下方的摄像机,红外光源安装在镜头的边上,用以产生普尔钦斑和亮瞳,如图3.29所示。使用前,要进行两个步骤的系统标定:
第一步是通过摄像机标定得到立体摄像机的系统参数。一旦摄像机系统标定完成,那么在摄像机前的任意一点,其三维坐标就可以利用它在两个摄像机上的点重构得到。

图3.29 美国Rensselaer Polytechnic Institute的朱志伟研制的视线追踪系统
第二步是得到红外光源和显示器在立体摄像机系统坐标下的三维位置。但是红外光源和显示器都在摄像机的视野之外,所以红外光源和显示器的定位不能直接通过摄像机观察得到。因此,要使用一个带有一系列基准标记的平面镜进行辅助定位。通过这个平面镜反射观察到光源和屏幕后,就可以利用摄像机系统进行定位了。
(2)美国IBM Almaden Research Center的Beymer研发的视线追踪系统[26](https://www.daowen.com)
系统硬件主要分为用以检测脸部特征的宽视野立体视觉系统,以及进行视线追踪检测的窄视野立体视觉系统,如图3.30所示。
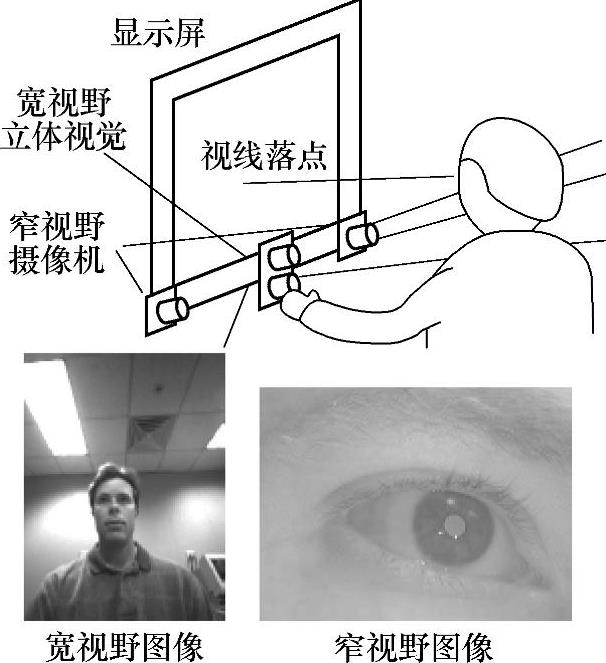
图3.30 美国IBM Almaden Research Center的Beymer建立的多摄像机多光源系统
宽视野立体视觉系统,位于屏幕正下方的中心位置。由于脸部特征主要处于水平状态,所以立体视觉系统的基线方向为垂直方向,这样能够与脸部特征的中心达到最优的匹配状态。Beymer选用了货架立体视觉系统,镜头焦距为4.8mm,水平视角为74°。当用户头部距离摄像机600mm左右时,足以检测到1mm左右的水平头部移动。当头部移动需要追踪眼部信息时,宽视野摄像机系统会传输给窄视野系统相应的指令。
两个窄视野摄像机组成的立体视觉系统,分别位于屏幕的两个底角,用以捕获高清晰的眼部图像,便于后续的视线追踪处理。由于使用的是窄视野摄像机,所以头部移动的速度要比摄像机转动速度快。因此,为了能够跟踪头部移动,使用了可以提供2ms移动能力的旋转镜子,以实现对头部的实时跟踪。摄像机的移动与摄像机的刷新周期是一致的,这样就保证了图像的质量。
窄视野摄像机的镜头焦距为49mm,是NTSC制式输出的CCD摄像机。由于镜头焦距过长降低了清晰成像的稳定度,所以系统使用电动机完成自动对焦功能。
系统设计了一个安装于镜头前的环形光源,用来产生角膜反射的普尔钦斑以实现视线追踪。
(3)韩国高级科技研究所的Dong Hyun Yoo开发的视线追踪系统[27]
该系统为了使头部运动不影响视线精度,使用了5个IR LED光源和2台摄像机,如图3.31所示。4个IR LED光源分别在显示器的4个边角,用来产生普尔钦斑。另1个IR LED光源在摄像机镜头的中间,用来产生亮瞳效果。4个边角上的IR LED同时亮灭,而在摄像机上的IR LED则独立运行。这些IR LED通过计算机的并口控制。IR LED的亮灭转换与图像的捕获是同步的。显示器上的LED产生了普尔钦斑,4个普尔钦斑可以在图像中看到。因为产生的普尔钦斑对应位置在显示器上,所以由普尔钦斑组成的多边形可以假设为显示器的反射。通过将图像空间映射至显示器屏幕,可以使用这些普尔钦斑估计视线盯视方向。在摄像机上放置的IR LED生成了亮瞳效果。
摄像机安置在云台上,所以脸部和眼部都可以被同步追踪。用一个具有高分辨率和高放大倍数的摄像机观察眼部信息,则捕获的眼部信息越多,系统精度就会越高。然而,有时使用一个高放大倍数的摄像机跟踪眼部较难,因为摄像机镜头的视野较窄,所以轻微的头动就可使眼睛偏离摄像机的视野区域。因此,当窄视野相机丢失眼睛时,就需要一个宽视野的摄像机来实时捕获眼睛位置。所以,需要一个追踪脸部的宽视野摄像机子系统。脸部追踪系统连续地追踪脸部信息,并且告知云台进行相应的调整。这样云台就可以控制窄视野摄像机在合适的位置捕获眼部信息。
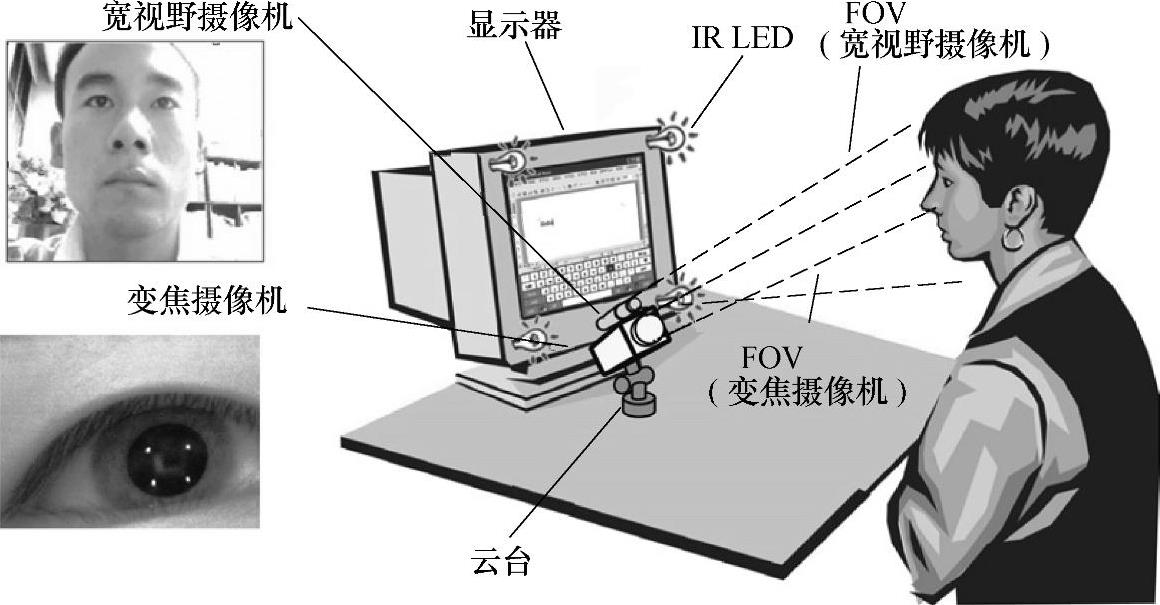
图3.31 韩国高级科技研究所的Dong Hyun Yoo设计的多摄像机多光源系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





