人眼的角膜能够反射照到它表面的光线,角膜反光法就是根据这一原理来实现的。假设人的眼球是一个标准的球体,当人的眼睛运动时角膜反射回的光线是固定不动的。但是由于眼睛的角膜是从眼球的表面凸出的,所以角膜的表面并不是一个标准的球面。当人的眼睛运动时,从角膜反射回的光线也会发生相应的变化,这样就可以通过记录角膜反光来分析眼动情况。较早使用角膜反光法研究眼动现象的是Dodge和Cline。其研究过程的具体操作方法:在被测试者的前方安置摄像机,并让外界光源产生的平行光照射到被测试者的眼球上,由角膜反射出来的光线就会进入摄像机,摄像机的感光胶片匀速运动,角膜反射出来的光点的移动轨迹就能够记录在感光胶片上,从而可以根据光点的运动轨迹来研究眼动的情况。Dodge和Cline用上述的方法对注视、追踪和阅读时的眼动进行了研究。
后来的研究人员对角膜反光法进行了改进,设计出了一种能够用于研究眼动情况的仪器。为了避免头部运动对记录结果的影响,他们设计了雪花石膏制成的帽子,并将光源及其他的光学仪器固定在帽子上。实验时,被测试者将帽子固定在头上,同时摄像机能够以每秒60张的速度将角膜反射光线的运动情况记录下来。后来,Johanson和Backlund对上述方案进行了改进,把雪花石膏变为更为轻便的装置,使仪器的整体重量降至0.68kg,这样在实验时被试者不会因为仪器的重量而感到不适,并且该仪器可以在较大范围内进行眼动研究[15]。其实,这种眼动检测系统就是现在的头盔式(穿戴式或侵入式)眼动系统。
角膜反光法是一种重要的眼动记录方法。这种方法最大的优点是被测试者的眼睛上没有附加任何装置,因此使得实验结果更加自然,能够更为准确地分析出被试者的眼动情况。因此,角膜反光法也为各种先进的眼动仪所采用[3]。其中,具有代表性的如美国应用科学实验室研制的EVM3200型眼动仪,以及加拿大SR公司研制的EyelinkⅡ型头盔式眼动仪[5]。
基于视频分析的瞳孔角膜反射法
基于视频分析的瞳孔角膜反射法可以应用于穿戴式视线追踪系统,也可应用于遥测式视线追踪系统。它是一种视线的检测方法。即利用光源,一般是红外光源,在角膜上的反射点和瞳孔中心之间的参数来反映视线方向。而视线参数的获取是通过视频分析实现的。
瞳孔角膜反射方法利用眼球转动时相对位置不变的某些眼部结构和特征作为参照,在位置变化特征和这些不变特征之间提取视线(Line of Sight/Point of Regard,LoS/PoR)变化参数,然后通过几何模型或映射模型获取视线方向。此方法具有对人干扰小,容易操作和精度较高的特点,拥有很大的研究发展空间。(https://www.daowen.com)
瞳孔角膜反射方法通过设置远离光轴的红外光源在角膜上形成反射点(普尔钦斑)。提取普尔钦斑中心到瞳孔中心的矢量作为视线方向参数,然后利用眼球成像模型或映射模型来估计视线方向。因此,角膜反射方法由提取视线特征参数和建立视线估计模型两部分组成,如图2.3所示。
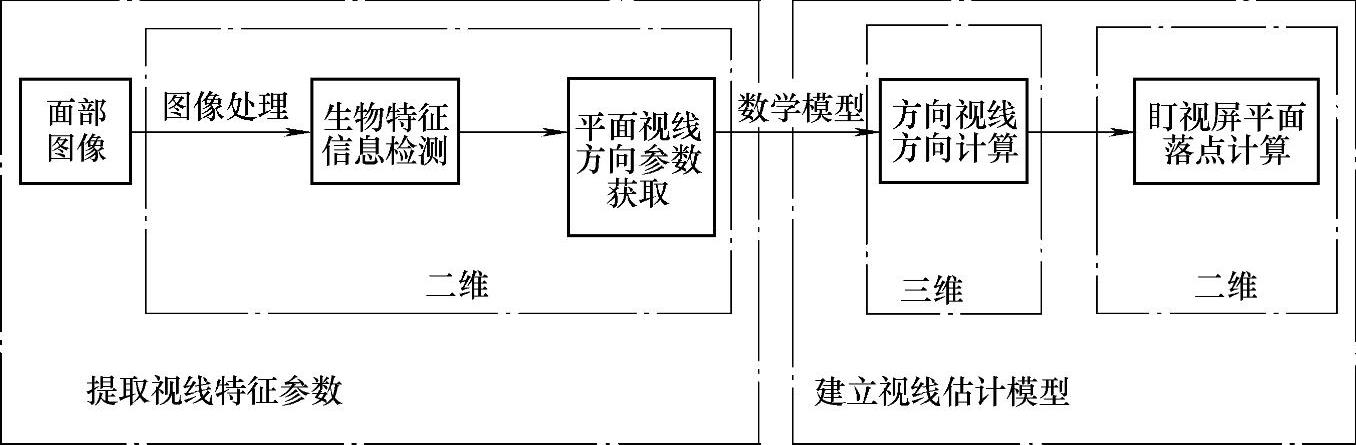
图2.3 角膜反射法流程图
基于视频分析的视线追踪利用摄像机和图像处理器计算出实时的视线方向或视线落点。视线追踪装置可以是放在桌面上的(所谓的非侵入式或遥测式),也可以是戴在头上的(所谓的穿戴式、头盔式或侵入式)。遥测式和穿戴式两种视线追踪系统本质上是一样的,视线的检测原理也大致相同。瞳孔和普尔钦斑的相对位置如图2.4和图2.5所示。随着眼球的转动,瞳孔中心和角膜反射点之间的位置关系也随之变化。根据瞳孔中心和角膜反射点之间的位置关系即可确定视线的方向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





