实际转子的支撑不是刚性的,都具有一定的弹性。在Jeffcott模型中把支撑处理成刚性,是认为支撑刚度要比转子本身的刚度大得多,以至于支撑在动反力作用下的变形量要比转子的动挠度小得多,在分析转子涡动中可以忽略不计。对于支撑刚度不比转子刚度大得多的情况,自然必须考虑它的影响。在某些动力机械(如大型火力发电机组)系统中,支撑日趋柔软,使得在转子涡动分析中考虑支承弹性越加重要。
考虑支承弹性后,转子的盘心进动轨迹是一个椭圆,出现两个临界ωcx和ωcy。当转子以这两个临界转速以外的角速度运行时,发生正涡动;在它们之间运动时,发生反涡动。临界转速的大小不仅与转子轴的弯曲刚度有关,而且还取决于支撑特性,尤其在两者的刚度量级接近时。在实际转子的运行中,大多观测到的是正涡动。这是因为支承特性虽然在水平和垂直方向上有差别,但是差别不是很大,故对应的两个临界转速靠得较近。不管接近哪个临界转速运行,都会使转子轴产生很大的动挠度。为了运行安全,不允许转子在这两个临界转速之间停留,而是很快地加速冲过这个区域。因此一般看不到稳态的反涡动,而只看到在这一转速区域之外的正涡动。为了模拟轴承,旋转最合适的单元类型,如表24-2所示。
表24-2 模拟轴承的常用单元特性

1.使用COMBIN14单元
COMBIN14单元允许在一个方向设置刚度或阻尼特性。下例给出了如何在X方向设置轴承的刚度系数KX和阻尼系数CX:
KX=l.e+5 !刚度值
CX=100 !阻尼值
et,1,combin14
keyopt,1,2,1 !X方向
r,1,KX,CX
指定关键字KEYOPT(2)的值来定义激活的自由度。单元操作在节点坐标系中完成。
2.使用COMBIN214单元
单元COMBI214允许在平面两个垂直方向定义刚度和阻尼特性。下例给出了在YZ平面定义上轴承:
et.1.combi214
keyopt,1,2,1 !YZ平面
r,l,KYY,KZZ,KYZ,KZY,CYY,CZZ
rmore,CYZ,CZY
COMBI214单元允许用户定义随转速变化的轴承特性。下例给出了KYY和KZZ随转速变化:
et,1,combi214
keyopt,1,2,1 !YZ平面
!define table KYY
*DIM,KYY,table,3,1,1,omegs !定义存储3个转速的表格
KYY(1,0)=0,1000,2000 !3个旋转速度(rd/s)
KYY(1,1)= l.e+6,2.7e+6,3.2e+6 !每一个旋转速度所对应的刚度特性
!define table KZZ
*DIM,K22,table,3,1,1,omegs !定义存储3个转速的表格(https://www.daowen.com)
KZZ(1,0)=0,1000,2000 !3个旋转速度(rd/s)
KZZ(1,1)= 1.4e+6,4.e+6,4.2e+6 !每一个旋转速度所对应的刚度特性
r,l,%KYY%,%KZZ%
指定关键字KEYOPT(2)的值来定义激活的自由度。单元操作在节点坐标系中完成。
如果COMBI214单元的特性随着转速变化而变化,并且如果使用命令CMOMEGA定义组件的转速,那么就要确定单元是否为合适的旋转组件。
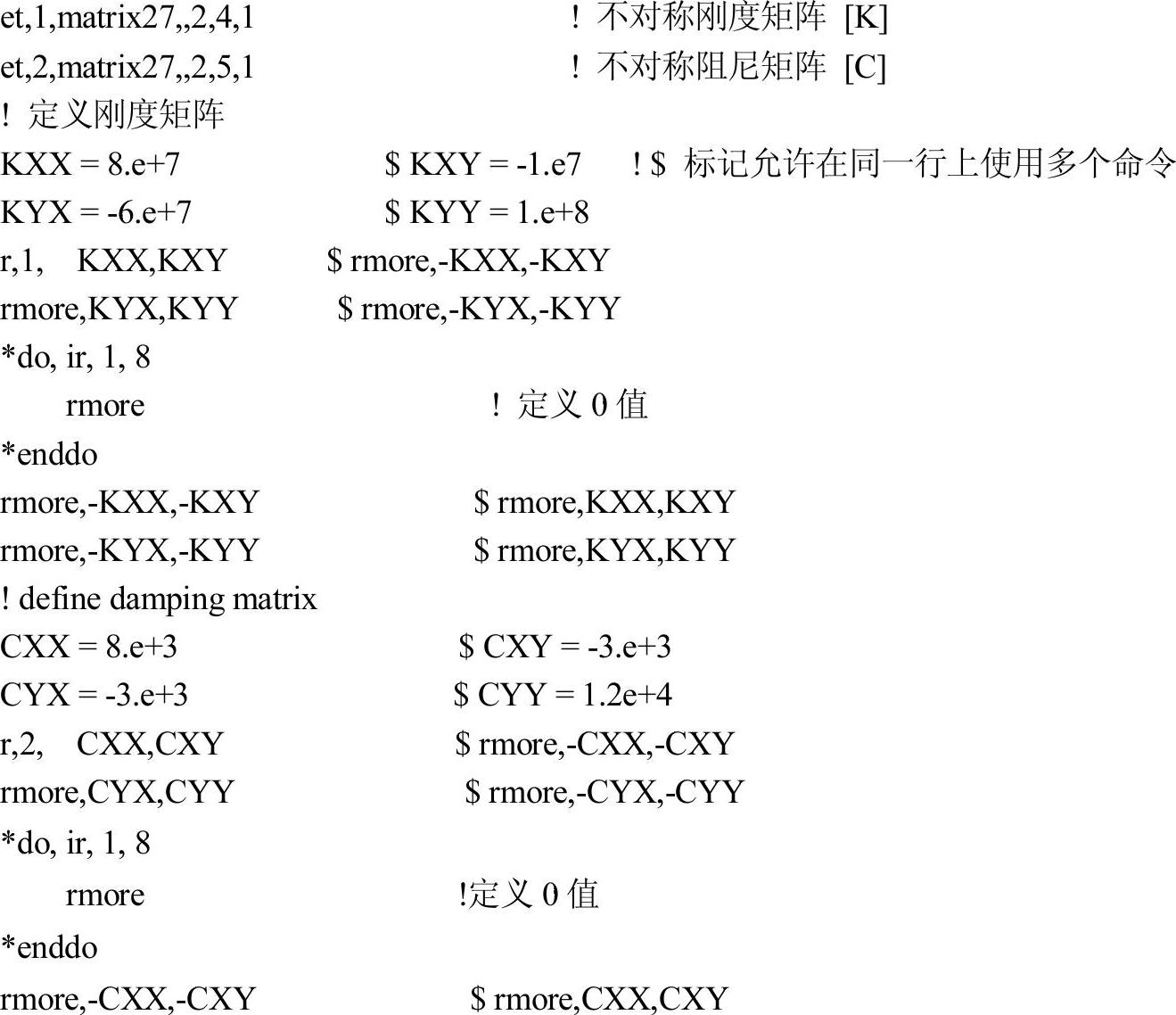
3.使用MATRIX27单元
MATRIX27单元允许用户定义12×12的刚度和阻尼矩阵,这些矩阵可以是对称或是不对称的实例如下:

4.使用MPC184通用铰单元
MPC184单元是一个具有弹性刚度和阻尼特性的铰单元。使用TB命令定义其6×6特性矩阵。如下例所示:
keyopt,2,4,1 !没有转动
sectype,2,j oint,gene
local,11,0,4,0,0,0,0,0 !铰单元的坐标系形式
secjoin,,ll
KYY=l.e+8
CYY=l.e+6
KZZ=l.e+10
CZZ=l.e+2
tb,join,2,,,stiff
tbdata,7,KYY
tbdata,12,KZZ
tb,join,2,,,damp
tbdata,7,CYY
tbdata,12,CZZ
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





