程序使用22个实常数和数个单元关键选项,来控制面-面接触单元的接触。
1.实常数
在22个实常数中,两个(R1和R2)用来定义目标面单元的几何形状。剩下的用来控制接触面单元。
R1和R2:定义目标单元几何形状。
FKN:定义法向接触刚度因子。
FTOLN:是基于单元厚度的一个系数,用于计算允许的穿透。
ICONT:定义初始闭合因子。PINB:定义“Pinball”区域。
PMIN和PMAX:定义初始穿透的容许范围。
TAUMAX:指定最大的接触摩擦。
CNOF:指定施加于接触面的正或负的偏移值。
FKOP:指定在接触分开时施加的刚度系数。
FKT:指定切向接触刚度。
COHE:指定滑动抗力粘聚力。
TCC:指定热接触传导系数。
FHTG:指定摩擦耗散能量的热转换率。
SBCT:指定Stefan-Boltzman常数。
RDVF:指定辐射观察系数;
FWGT:指定在接触面和目标面之间热分布的权重系数。
FACT:指定静摩擦系数和动摩擦系数的比率。
DC:指定静、动摩擦衰减系数。
SLTO:指定当摩擦系数非零时控制最大滑动距离。
TOLS:指定添加一个能扩展到目标表面的边缘的小容限。
PPCN:指定压力-透穿准则(只适应用于接触单元)
命令:R
GUI:Main Menu|Preprocessor|Real Constants
对实常数FKN、FTOLN、ICONT、PINB、PMAX、PMIN、FKOP和FKT,用户既可以定义一个正值,也可以定义一个负值。程序将正值作为比例因子,将负值作为绝对值。程序将下伏单元的厚度作为ICON、FTOLN、PINB、PMAX和PMIN的参考值。例如ICON=0.1表明初始闭合因子是“0.1×下层单元的厚度”。然而,ICON=-0.1则表示真实调整带是0.1单位。如果下伏单元是超单元,则将接触单元的最小长度作为厚度,参见图16-9。
在模型中,如果单元尺寸变化很大,而且在实常数(如ICONT、FTOLN、PINB、PMAX、PMIN)中应用比例系数,则可能会出现问题。因为从比例系数得到的实际结果,取决于下层单元的厚度,这就可能引起大、小单元之间的重大变化。如果出现这一问题,请用绝对值代替比例系数。TCC、FHTG、SBCT、RDVF和FWGT仅用于热接触分析(KEYOPT(1)=1)。
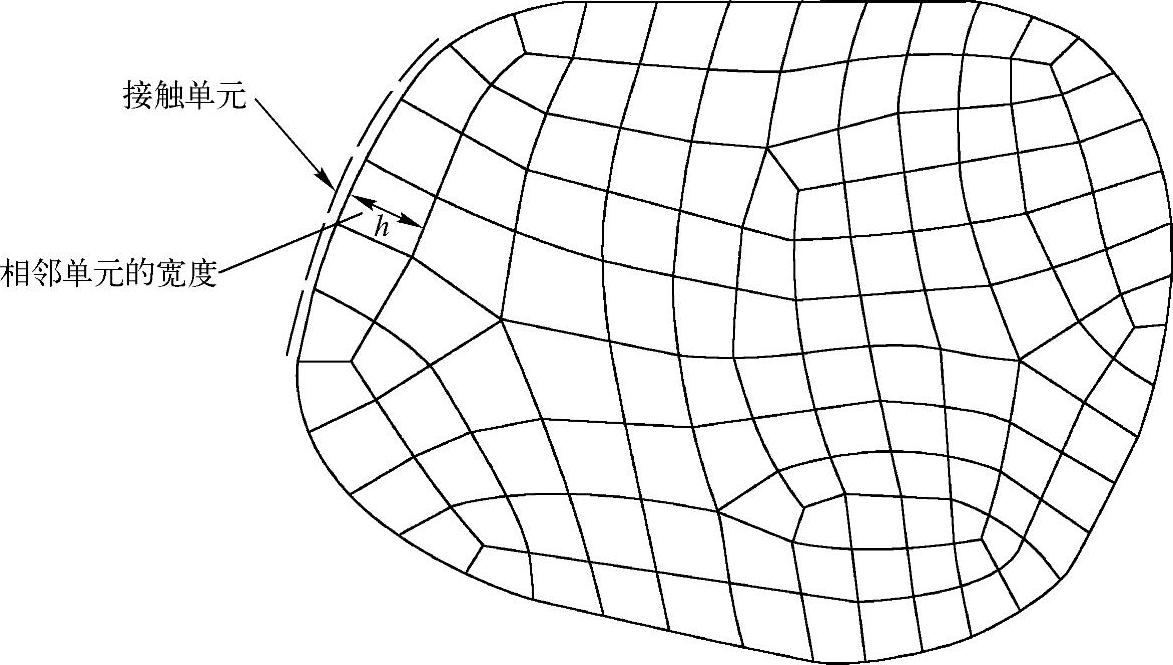
图16-9 下层单元的厚度
2.单元关键选项
每种接触单元都包括数个关键选项。对大多的接触问题,默认的关键选项是合适的。而在某些情况下,可能需要改变默认值。下面是可以控制接触行为的一些关键选项。
自由度 KEYOPT(1)
接触算法(罚函数+拉格朗日乘子或罚函数) KEYOPT(2)
接触检测点的位置(仅低阶接触单元) KEYOPT(4)
CNOF自动调整 KEYOPT(5)
接触刚度变化范围 KEYOPT(6)
时间步控制 KEYOPT(7)
伪接触预防 KEYOPT(8)
初始穿透或间隙的影响 KEYOPT(9)
法向和切向接触刚度修正方法控制 KEYOPT(10)
壳的厚度影响 KEYOPT(11)
接触面行为(粗糙、绑定等) KEYOPT(12)
命令: KEYOPT/ET
GUI:Main Menu|Preprocessor|Element Type|Add/Edit/Delete
3.选择接触算法
对面-面接触单元,程序可以使用增进的拉格朗日方法或罚函数方法。通过单元关键字KEYOPT(2)来指定:
罚函数法(Penalty method)(KEYOPT(2)=1);
增进的拉格朗日方法(Augmented Lagrangian)(默认)(KEYOPT(2)=0);
拉格朗日方乘子法(Lagrange multiplier on contact normal and penalty on tangent)(KEYOPT(2)=3);
纯拉格朗日方乘子法(Pure Lagrange multiplier on contact normal and tangent)(KEYOPT(2)=4);
内部多点约束(Internal multipoint constraint)(MPC)(KEYOPT(2)=2)。
增进的拉格朗日方法是为了找到精确的拉格朗日乘子(即接触力),而对罚函数进行一系列修正迭代。与罚函数的方法相比,拉格朗日方法容易得到良态条件,对接触刚度的敏感性较小。然而,在有些分析中,增进的拉格朗日方法可能需要更多的迭代,特别是在变形后网格变得太扭曲时。
使用拉格朗日方法的同时应使用实常数FTOLN。FTOLN为拉格朗日方法指定容许的最大穿透。如果程序发现穿透大于此值,即使不平衡力和位移增量已经满足了收敛准则,总的求解仍被当做不收敛处理。FTLON的默认值为0.1。用户可以改变这个值,但要注意,如果此值太小,可能会造成太多的迭代次数或不收敛。
4.确定接触刚度
所有的接触问题都需要定义接触刚度,两个表面之间穿透量的大小取决于接触刚度。过大的接触刚度可能会引起总刚矩阵的病态,从而造成收敛困难。一般来说,应该选取足够大的接触刚度以保证接触穿透小到可以接受,但同时又应该让接触刚度足够小以不致引起总刚矩阵的病态而保证收敛性。
ANSYS程序根据下伏柔体单元的材料特性,来估计一个默认的接触刚度值。用户可用实常数FKN来为接触刚度指定一个比例因子或指定一个绝对值。比例因子一般在0.01和10之间;对于大变形问题,选1是比较好的;而对于弯曲为主的问题,通常为0.01~0.1。用户应当总是检验以使穿透到达极小值,而又避免过多的迭代次数。
注意:FTOLN和FKN从一个载荷步到另一个载荷步中,都可以修改。也可以在重启动中修改。这时,必须定义KEYOPT(10)=1,2。
为了确定一个较好的接触刚度值,可能需要一些经验。用户可以按下面的步骤来进行尝试。
1)开始时取一个较低的值。低估值要比高估值好,因为由一个较低的接触刚度导致的穿透问题,比过高的接触刚度导致的收敛性困难。
2)对前几个子步进行计算分析,直到最终载荷的一个比例(刚好完全建立接触)。
3)检查每一子步中的穿透量和平衡迭代次数。如果总体收敛困难是由过大的穿透引起的(而不是由不平衡力和位移增量引起的),那么可能低估了FKN的值,或者是将FTOLN的值取得大小。如果总体的收敛困难是由于不平衡力和位移增量达到收敛值时需要过多的迭代次数,而不是由于过大的穿透量引起的,那么FKN的值可能被高估。
4)按需要调整FKN或FTOLN的值,重新进行完整的分析。
注意:如果穿透控制变成总体平衡迭代中的主因(如果使问题收敛到穿透容差内,比收敛到不平衡力的容差内,需要更多的迭代),用户应该增大FTOLN值,以允许更多的穿透,或增大FKN。
5.选择摩擦类型
(1)摩擦应用的背景
在基本的库仑摩擦模型中,两个接触面在开始相互滑动之前,在它们的界面上会有达到某一大小的剪应力产生。这种状态称为粘合状态。库仑摩擦模型定义了一个等效剪应力τ,在某一法向压应力p作用下剪应力达到此值时表面开始滑动(τ=μp+COHE,其中μ是摩擦系数MU,作为材料特性定义,而COHE是粘聚力)。一旦剪应力超过此值后,两个表面之间将开始相互滑动。这种状态,叫做滑动状态。粘合/滑动计算决定什么时候一个点从粘合状态变到滑动状态,或从滑动状态变到粘合状态。摩擦系数可以是任一非负值,程序默认值为表面之间无摩擦。对于粗糙或绑定接触(KEYOPT(12)=1、3、5、6),程序将不管给定的MU值而认为摩擦阻力无限大。
(2)摩擦的模式
程序提供了一个人为指定最大等效剪应力的选项,不管接触压力值的大小,如果等效剪应力达到此值时,即发生滑动,见图16-10。为了指定接触界面上最大容许剪应力,设置常数TAUMAX(默认为1.0E20)。这个剪应力极限,通常用于在接触压力非常大的时候(如在某些加工过程中)的一些情况,以至于用库仑理论计算出的界面剪应力超过了材料的屈服极限。TAUMAX的一个合理上限估值为 (σy是表面附近材料的vonMises屈服应力)。经验数据有助于决定TAUMAX的值。
(σy是表面附近材料的vonMises屈服应力)。经验数据有助于决定TAUMAX的值。
(3)静、动摩擦系数
摩擦系数依赖于接触面的相对滑动速度,通常静摩擦系数高于动摩擦系数。
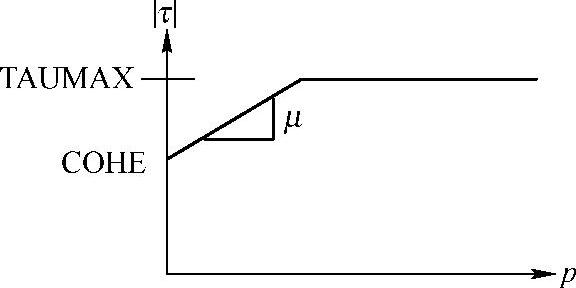
图16-10 摩擦模式
ANSYS提供了如下表示的指数衰减摩擦模型:
µ=µ动×(1+(MB-1)exp(-SJ×Vrel)) (16-1)
其中,μ为静摩擦系数,µ动为动摩擦系数,用MP命令输入;MB是静摩擦系数与动摩擦系数之比,默认为最小值1.0,SJ为衰减系数,默认为0.0,单位为时间/长度(因此,时间在静态分析中有一些意义),Vrel是ANSYS计算的滑动速度。
对于各向同性摩擦模型,如上所述可以使用MP或TB输入µ动。对于各向异性摩擦模型,µ动是由MU1和MU2来计算出的等效摩擦系数,并且使用TB命令输入。

图16-11 给出了摩擦系数的指数衰减曲线,其中静态摩擦系数由下式给出:
µs=MB×µ动 (16-3)
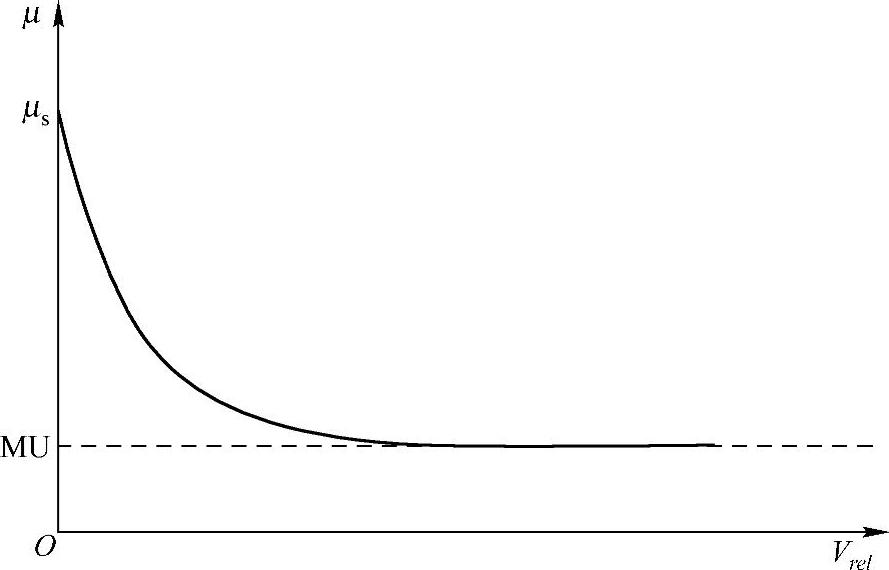
图16-11 摩擦系数的指数衰减曲线
如果知道静、动摩擦系数和至少一个数据点(µ1,Vrel),则可以确定摩擦衰减系数为:

如果不指定衰减系数,且MB大于1.0,当接触进入滑动状态时,摩擦系数会从静摩擦系数突变到动摩擦系数,这种行为类似于动摩擦模型,因为这会导致收敛困难,所以不建议采用。
(4)对称、不对称求解器
对无摩擦、粗糙和绑定接触,接触单元刚度矩阵是对称的。而涉及摩擦的接触问题产生了一个不对称的刚度。在每次迭代中使用不对称的求解器,比对称的求解器需要更多的计算时间。因此ANSYS程序采用对称化算法。通过采用这种算法,大多数摩擦接触问题能够使用对称系统的求解器来求解。如果摩擦应力在整个位移场内有相当大的影响,并且摩擦应力的大小高度依赖于求解过程,则对刚度阵的任何对称近似都可能导致收敛性降低。在这种情况下,选择不对称求解选项(NROPT,UNSYM)来改善收敛性。
6.选择接触检查的位置
接触检查点位于接触单元的积分点上。在积分点上,接触单元不穿透进入目标面。然而,目标面能穿透进入接触面,见图16-12。
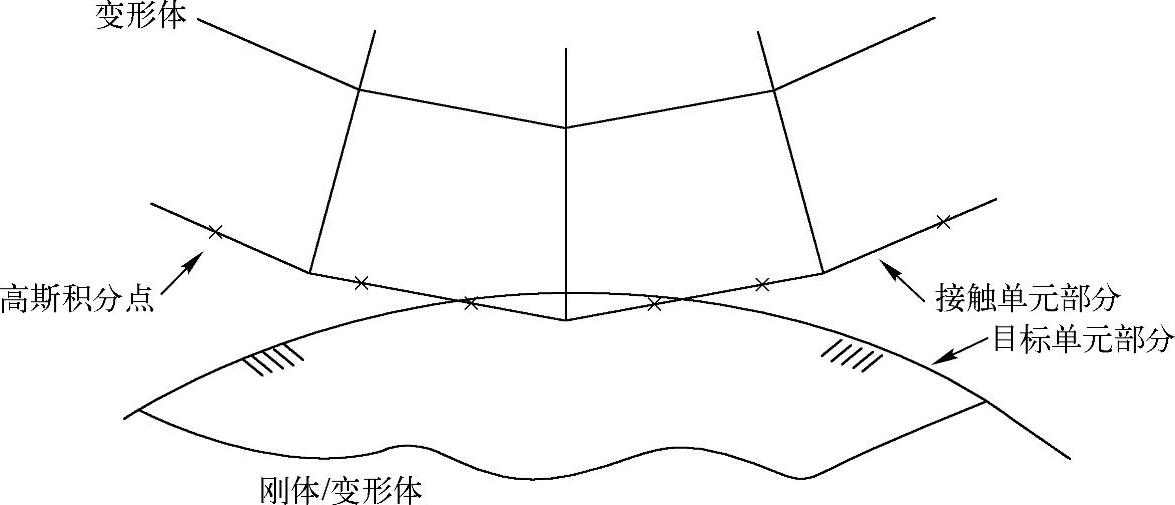
图16-12 接触检查点位于高斯积分点上
ANSYS面-面接触单元使用高斯积分点作为默认值,高斯积分点通常会比Newton-Cotes/Lobatto节点积分方法产生更精确的结果,Newton-cotes/Lobatto用节点本身作为积分点。通过KEYOPT(4)来选择用户想使用的方法。这一选项仅适用于低阶接触。然而,使用节点本身作为积分点仅适用于角接触问题(见图16-13)。
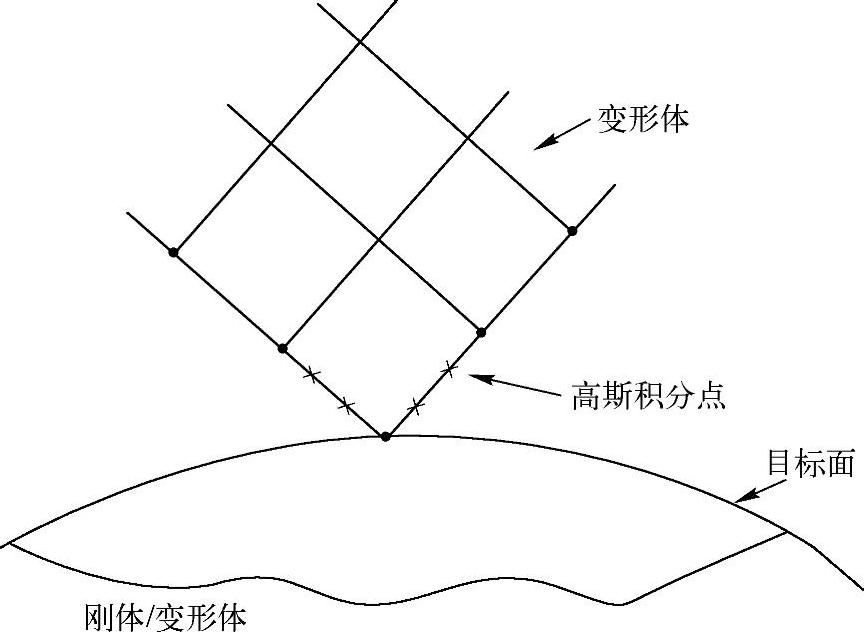
图16-13 接触检查点位于节点上
注意,使用节点作为接触检查点可能会导致其他收敛性问题,例如“滑脱”(节点滑出目标面的边界),见图16-14。对大多数的点-面的接触问题,推荐使用其他的点-面的接触单元。
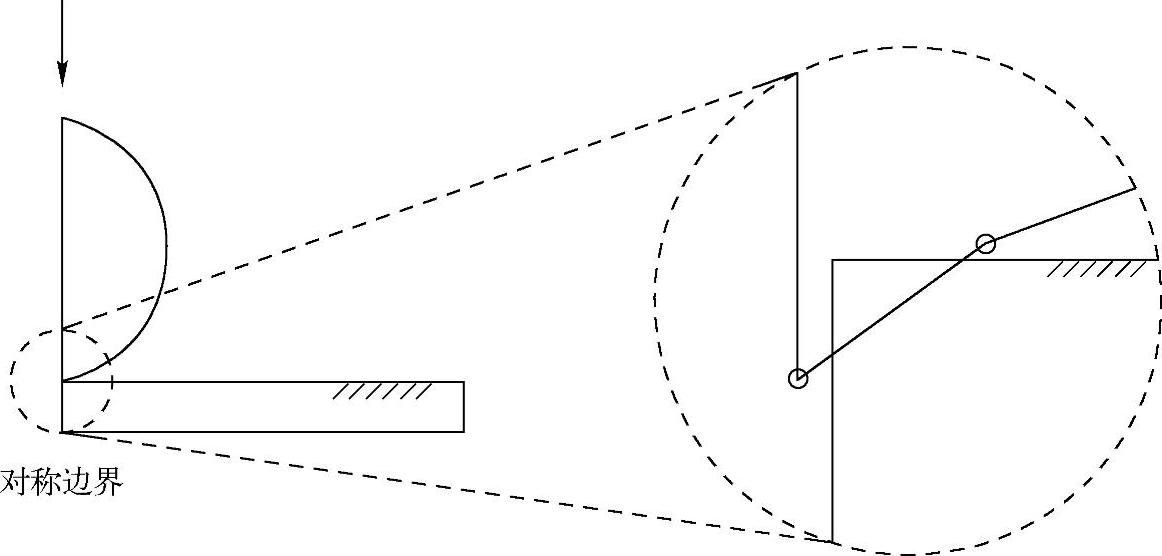
图16-14 节点滑脱
7.调整初始接触条件
(1)背景
在动态分析中,刚体运动一般不会引起问题。然而在静力分析中,当物体没有足够的约束时会产生刚体运动,有可能引起错误而终止计算。在仅仅通过接触的出现来约束刚体运动时,必须保证在初始几何体中,接触对是接触的。换句话说,用户要建立模型以便接触对是“刚好接触”的。然而这样做,可能会遇到以下问题。
●刚体外形常常是复杂的,很难决定第一个接触点发生在哪儿。
●既使实体模型在初始时处于接触状态,在网格划分后由于数值舍入误差,两个面的单元网格之间也可能会产生小缝隙。
●接触单元的积分点和目标单元之间可能有小缝隙。
同理,在目标面和接触面之间可能发生过大的初始穿透。在这种情况下,接触单元可能会高估接触力,导致不收敛或接触面之间脱开接触关系。定义初始接触也许是建立接触分析模型时最重要的方面。因此,程序提供了几种方法来调整接触对的初始接触条件。
注意:下面的技巧可以在开始分析时独立执行,或几个联合起来执行。执行它们是为了消除由于生成网格造成的数值舍入误差而引起的小间隙或穿透,而不是为了改正网格或几何数据的错误。
(2)应用关键字KEYOPT(5)和KEYOPT(9)使用PMIN、PMAX、CNOF、ICONT
1)应用实常数CNOF来指定一个接触面偏移。
指定正的值来使整个接触面偏向目标面。指定负的值来使接触面离开目标面。
ANSYS能够自动提供CNOF值到刚好闭合间隙或减少初始穿透。通过如下方法设置KEYOPT(5):=1:闭合间隙;=2:减少初始穿透;=3:闭合间隙或减少初始穿透。(www.daowen.com)
如果设置了KEYOPT(5)=0,则ICONT默认值为0。
2)使用实常数ICONT来指定一个小的初始接触环,初始接触环是指沿着目标面的“调整环”的深度。如果没有人为指定ICONT的值,程序会根据几何尺寸来给ICONT提供一个小值(但有意义的值),同时输出一个表示什么值被指定的警告信息。ICONT正值表示相对于下层单元厚度的比例因子;负值表示接触环的绝对值。任何落在“调整环”域内的接触检查点被自动移到目标面上,(参见图16-15a)。建议使用一个十分小的ICONT值,否则可能会发生严重不连续(参见图16-15b)

图16-15 用ICON进行接触面的调整
a)调整之前 b)调整之后
CNOF与ICONT之间的差别,是前者把整个接触面移动CNOF的距离,而后者把所有初始分开的(刚好位于调整环ICONT内的)接触点向目标面移动。
如果用户应用其他方法来平衡初始未约束的自由体(如FTOLN,PINB,PMAX和PMIN),基本上消除ICONT的影响(把它关联一个很小的值,如1E-20),是一个好办法。但是,设置ICONT=0,并不会关闭它。而是导致ANSYS用默认值代替。当与其他约束自由体的方法联用时,这反而可能不能达到所期望的效果。
3)使用实常数PMIN和PMAX来指定初始容许的穿透范围。当指定PMAX或PMIN后,在开始分析时,程序会将目标面移到初始接触状态,见图16-16。如果初始穿透大于PMAX,程序会调整目标面来减少穿透。接触状态的初始调整仅仅通过平移来实现。
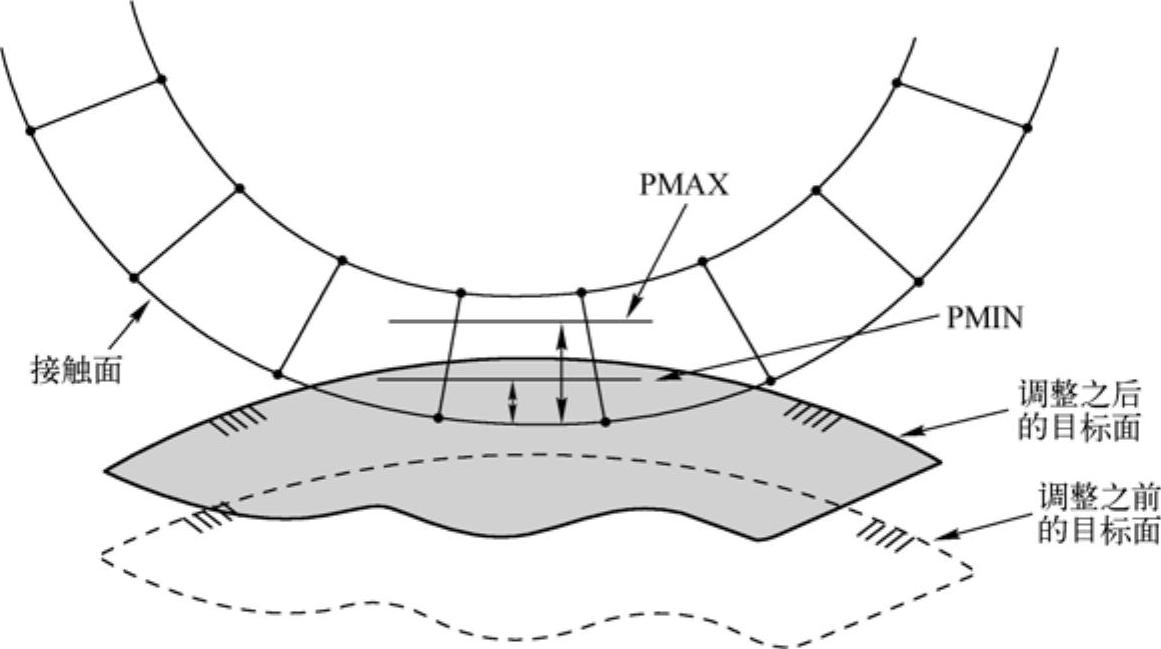
图16-16 接触面调整(PMIN、PMAX)
对给定载荷或给定位移的刚性目标面,将会执行初始接触状态的初始调整。对没有指定边界条件的目标面,也同样可以进行初始接触的调整。
当目标面上的所有节点有给定的零位移值时,使用PMAX和PMIN的初始调整将不会被执行。
注意:ANSYS程序独立地处理目标面上节点的自由度。例如,如果用户指定自由度UX值为“0”,那么沿着X方向就没有初始调查。然而,在Y和Z方向仍然会激活PMAX和PMIN选项。
初始状态调整是一个迭代过程,程序最多进行20次迭代。如果目标面不能进入可接受的穿透范围(即PMIN,PMAX范围),程序将在原始几何实体上操作。这时程序会给出一个警告信息,警告用户可能需要调整用户的初始几何模型。
图16-17给出了一个初始接触调整迭代失败的例子。目标面的UY被约束。因此,初始接触唯一容许的调整是在X方向的。然而,在这个问题中,刚性目标面在X方向的任何运动都不会引起初始接触。
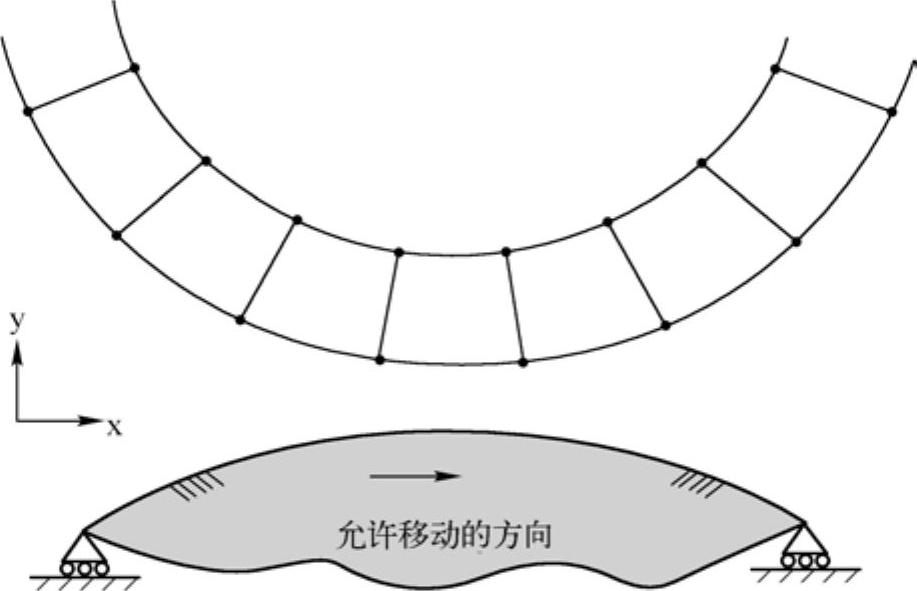
图16-17 一个初始调整失败的例子
对于柔体-柔体接触,这种方法不仅移动整个目标面,还同时移动与目标面相连的整个柔体。请确保没有其他接触面或目标面与柔体相连。
4)设置KEYOPT(9)=1来调整初始穿透或间隙,见图16-18。
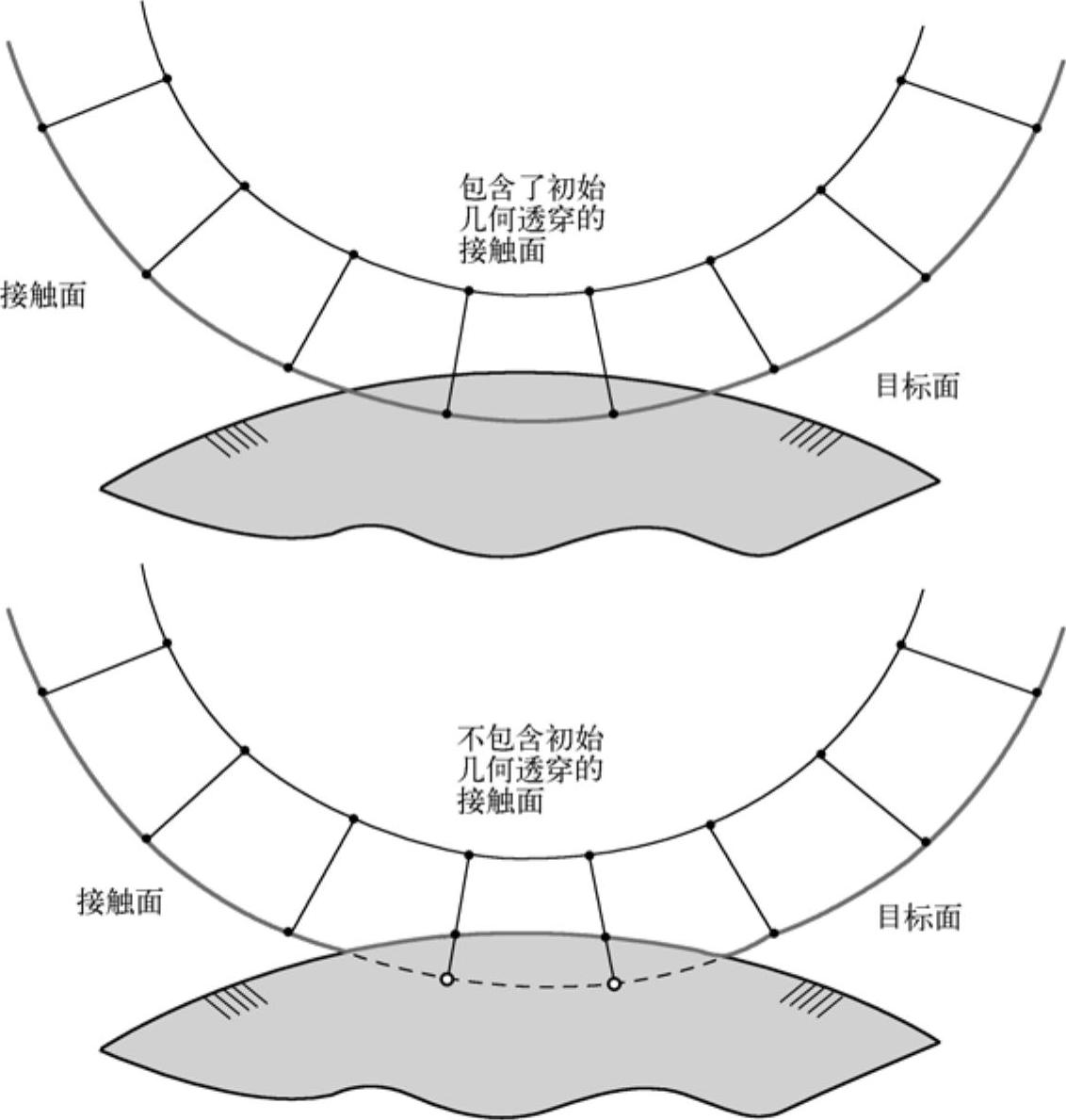
图16-18 忽略初始穿透,KEYOPT(9)=1
真正的初始穿透包括以下两部分。
●几何模型产生的穿透或间隙。
●用户定义的接触面偏移(CNOF)产生的穿透或间隙。
KEYOPT(9)提供了下列功能。
●包括由几何和接触面偏移产生的初始穿透,设置KEYOPT(9)=0,这是默认项。
●忽略上面两者引起的初始穿透,设置KEYOPT(9)=1。在KEYOPT(12)=4或5时,这一KEYOPT(9)=1,也将忽略间隙弹簧的初始力,这样,建立了一个初始的“理想的”接触面—在接触截面上没有初始力的作用。
●为了包括定义的接触面偏移(CNOF),但忽略由于几何模型引起的初始穿透,设置KEYOPT(9)=3。在KEYOPT(12)=4或5时,这一KEYOPT(9)=3,也将忽略打开间隙弹簧的初始力,这样,建立了一个初始的“理想的”接触面—在接触截面上没有初始力的作用。
在某些情况下,例如过盈装配问题,期望有过度的穿透。如在第一个载荷步施加阶跃初始穿透,可能造成收敛困难。为了缓解收敛性困难,可以在第一个载荷步中设置渐变的初始穿透,见图16-19。
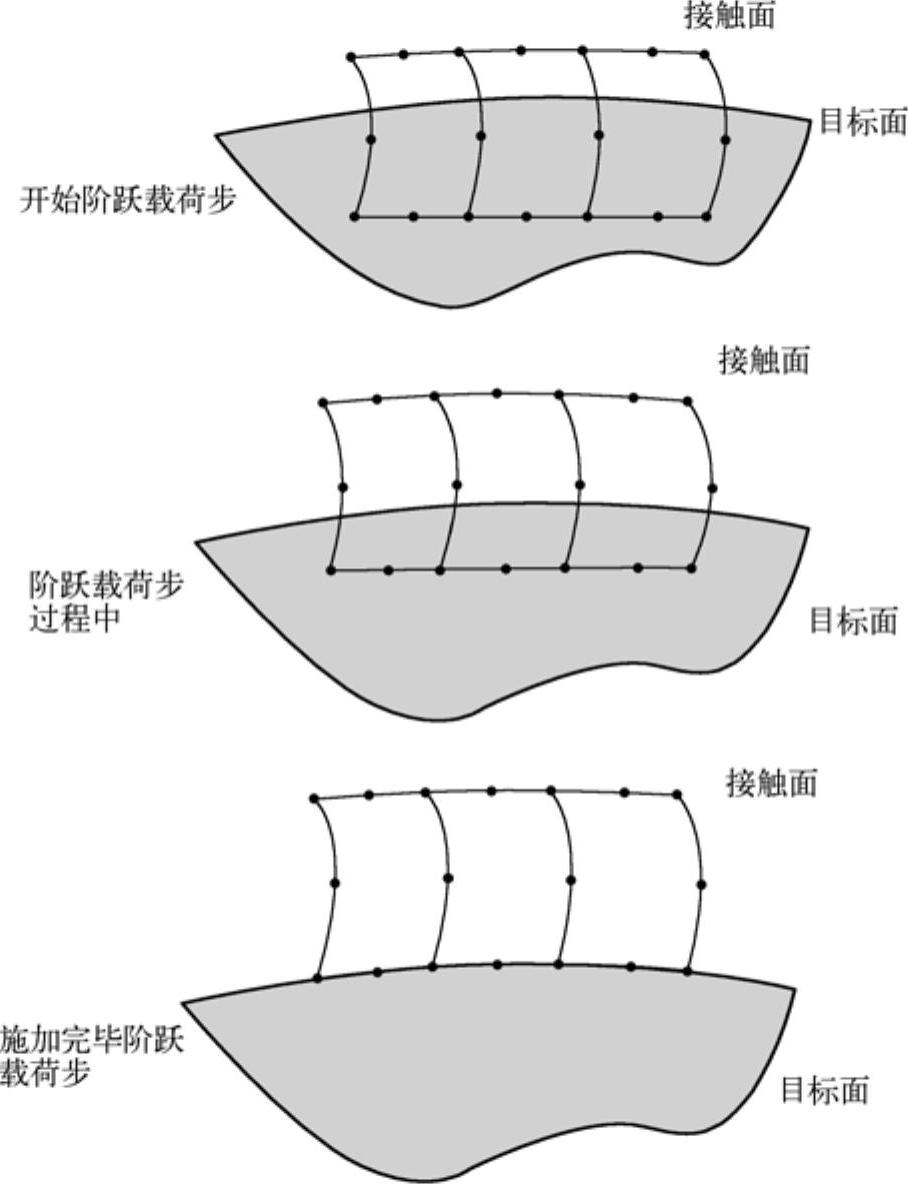
图16-19 渐变初始过盈
下面的KEYOPT(9)设置用来提供渐变功能。
●设置KEYOPT(9)=2,渐变施加初始穿透(CNOF+由于几何模型造成的偏移)。
●设置KEYOPT(9)=4,渐变施加接触面穿透,但忽略由于几何模型造成的穿透。
对于上面两个KEYOPT(9)设置,用户还应该设置KBC,0,并在第一个载荷步中不要给定任何其他外载荷。还要确保球形(Pinball)区域足够大以捕捉到初始过盈。
用户可以联合应用上面的技术。例如,用户可能希望设置十分精确的初始渗透或间隙,但有限元节点的初始坐标可能无法提供足够的精度。这时,可以采用以下几种方法。
●应用ICONT来移动初始张开的接触点刚好碰到目标面。
●应用CNOF来指定穿透(正值)或间隙(负值)。
●应用KEYOPT(9)=3来在第一个子步求解初始穿透,或应用KEYOPT(9)=4来逐渐求解初始穿透。
在开始分析时,程序会给出每个目标面的初始接触状态的输出信息(输出窗口或输出文件中),这个信息有助于决定每个目标面的最大穿透或最小间隙。
对于给定的目标面,如果没有发现接触,可能是目标面离接触面太远(超出了球形区域),或者是接触或目标单元已经被杀死。
8.决定接触状态和球形区域
接触单元相对于其目标面的运动和位置,决定了接触单元的状态;程序检测每个接触单元,并给出如下之一的状态。
STAT=0,未闭合的远场接触。
STAT=1,未闭合的近场接触。
STAT=2,滑动接触。
STAT=3,粘合接触。
当目标面进入球形区域后,接触单元就被当做未闭合的近场接触,球形区域是以接触单元的积分点为中心的。
使用实常数PINB来为球形区域指定一个比例因子(正值),或其绝对值(负值)。默认时,程序将球形区域定义为一个以“4×下层单元厚度(对于刚体-柔体接触)”或“2×下层单元厚度(对于柔体-柔体接触)”为半径的圆(对二维问题)或球(对三维问题)。
检查接触的计算时间依赖于球形区域的大小,远场接触单元计算简单,计算时间较少。近场接触计算(对于接近接触或实际接触的接触单元)较慢并且较复杂。当单元已经接触时,计算最为复杂。
如果刚性面有好几个凸形区域,为了克服伪接触定义,设置一个合适的球形区域是有用的。而对大多数问题,默认值是合适的。
9.在自接触问题中避免伪接触
在一些对称接触问题(包括自接触)中,ANSYS可能错误地假设在十分接近的几何位置上的接触面和目标面之间的接触。在自接触问题的角点会发生这一问题。它可能是由单元的初始几何位置引起的,也可能是在分析时通过变形而引起的。在二个面位于球形区域内,而且它们之间夹角小于90°时,会产生这一问题。在这种情况下,ANSYS程序认为发生了十分大的穿透。图16-20说明了这种情况。
ANSYS在各个载荷步中第一次检测到伪接触时会发出一个警告。如ANSYS在第1载荷步中发现这种接触,用户可看到如下的信息:
“Contact element x has too much penetration related to target elementy.
We assume it(maybe more elements)is spurious contact.”
如果ANSYS检测到归类为伪接触的突变,用户看到如下信息:
“Contact element x status changed abruptly with target elementy.
We assume it(may be more elements)is spurious contact.”
ANSYS在一个载荷步中仅发出一次这样的信息。在该载荷步中如果还存在其他的伪接触,ANSYS不再提醒。
注意:在应用KEYOPT(8)=1之前,请认真检查模型。ANSYS将忽略符合了过度穿透准则的真正接触。这一技术应当仅用于在改变球形区域PINB不能阻止伪接触的情况。
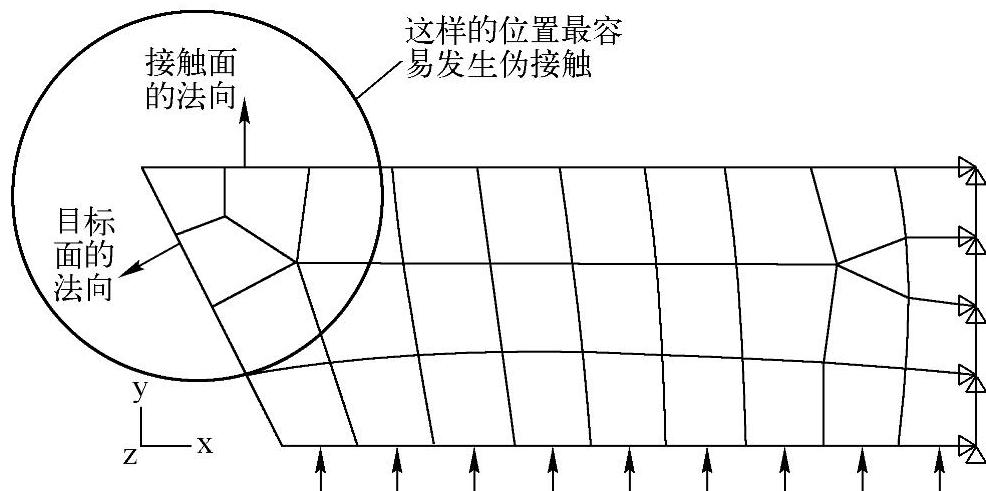
图16-20 检测伪接触
10.修正法向和切向接触刚度
在分析过程中,可以修正法向和切向接触刚度。可以自动修正(由于改变下伏单元刚度的大应变效应产生),也可以显式地修正(由用户重新指定FKN或FKT值)。KEYOPT(10)控制法向和切向接触刚度如何修正。
●KEYOPT(10)=0,禁止那些已经处于“闭合”状态的单元的接触刚度修正。对于从“张开”变化到“闭合”状态的单元,将在每一个子步上修正接触刚度。
●KEYOPT(10)=1,允许已处于“闭合”状态的单元的接触刚度,在载荷步之间或在重启动期间改变。对于从“张开”变化到“闭合”状态的单元,将在每一个子步上修正接触刚度。
●KEYOPT(10)=2与KEYOPT(10)=1相同,只是对所有单元(不论其状态)将在每一个子步上,由程序决定自动修正。
11.选择表面作用模式
面-面接触单元支持法向单向接触模式及其他力学表面作用模式。通过设置KEYOPT(12)来选择下面的某种作用模式。
●KEYOPT(12)=0,法向单向接触,即在接触分开时,法向压力等于0。
●KEYOPT(12)=1,理想粗糙接触,用来模拟无滑动的、表面完全粗糙的摩擦接触问题,这种设置对应于摩擦系数无限大,因此用户定义的摩擦系数(MU)被忽略。
●KEYOPT(12)=2,“不分离”接触,接触面和目标面一旦接触,在其后的分析中就连在一起(虽然允许有相对滑动)。
●KEYOPT(12)=3,绑定接触模式,目标面和接触面一旦接触,随后就在所有方向上绑定。
●KEYOPT(12)=4,不分离接触,其中的接触积分点,或初始在球形区域内,或一旦接触,就总是与目标面沿接触面的法向连在一起的,但允许滑动。调整FKOP(见下),可用“软弹簧”把这些区域联系在一起。
●KEYOPT(12)=5,绑定接触模式,其中接触积分点,或者初始在球形区域内,或者一旦接触,就总是与目标面沿接触面的法向和切向绑定在一起的。
●KEYOPT(12)=6,绑定接触模式,其中初始接触的接触积分点保持与目标面接触,而初始处于打开状态的接触积分点,在整个分析期间保持打开状态。这个选项与在初始接触的区域应用CEINTF类似。
对于模拟不分离或绑定接触,用户可能需要设置FKOP实常数。这在接触张开时,提供一个刚度系数。如果FKOP为正值,则真正的接触张开刚度等于FKOP乘以接触闭合时施加的刚度。如果FKOP为负值,该值作为接触张开刚度的绝对值。默认的FKOP值为1。
不分离或绑定接触,在接触发生张开时,产生“回拉”力,这个力可能不足以阻止分离。为了减小分离,定义一个较大的FKOP值。在有些时候,希望接触面分离,但需要在接触面之间建立联系来阻止刚体运动,在这种情况下,可以指定较小的FKOP值,以使接触面之间保持联系(这是“软弹簧”效应)。
12.用超单元建立接触模型
(1)背景
面-面的接触单元能模拟刚体(或一个线弹性体)和另一个有小位移的线弹性体的接触。这些线弹性体可用超单元来建模,这大大降低了进行接触迭代的自由度数。记住任何接触或目标节点都必须是超单元的主自由度。
由于超单元仅仅由一组保留的节点自由度组成,它没有用来定义接触面和目标面的几何形状。因此,必须在形成超单元之前在原始单元表面上定义接触面和目标面。来自超单元的信息包括节点连结和组合刚度,但是没有材料特性和应力状态(轴对称、平面应力或平面应变)。一个限制是接触单元的材料特性设置必须与形成超单元之前的原始单元的材料特性相同。
(2)使用KEYOPT(3)来提供二维接触分析的信息
CONTA171、CONTA172单元的选项如下。
●KETOPT(3)=0,不使用超单元。
●KEYOPT(3)=1,轴对称。
●KEYOPT(3)=2,平面应变或单位厚度的平面应力。
●KEYOPT(3)=3,需要厚度输入的平面应力。
对这种情况,使用实常数R2来指定厚度。
对于三维接触分析,CONTA173,CONTA174单元的KEYOPT(3)选项忽略。ANSYS将自动检查下伏单元是否为超单元。
13.考虑厚度影响
(1)背景
程序能够用KEYOPT(11)来考虑壳(二维和三维)、梁(二维)的厚度。对于刚体-柔体接触,ANSYS将自动移动接触面到壳、梁的底面或顶面。对于柔体-柔体接触,ANSYS将自动移动与壳、梁单元相连的接触面和目标面。默认时,程序不考虑单元厚度,用中面来表示梁和壳,而穿透距离从中面计算。
(2)使用关键字KEYOPT(11)
当设置KFTOPI(11)=1时,则考虑壳或梁的厚度。从指定的底面或顶面来计算穿透距离。注意:仅在使用节点位于中面的壳或梁单元时(例如,KEYOPT(11)=0的SHELL181单元),用KEYOPT(11)=1来考虑厚度影响。
建模时如要考虑厚度,记住偏移可能来自接触面、目标面或来自两者。在和KEYOPT(11)=1一起指定接触偏移(CNOF)时,CNOF从壳或梁的顶面和底面计算,而不是中面。当和SHELL181一起使用时,还考虑变形过程中的厚度变化。
14.使用时间步长控制
(1)背景
时间步长控制是一个自动时间步长特征,这个特征预测什么时间接触单元的状态将发生变化,或者二分当前时间步。
(2)使用关键字KEYOPT(7)
使用KEYOPT(7)来选择下列四种行为之一来控制时间步长。KEYOPT(7)=0时不提供控制(默认),KEYOPT(7)=3提供最多的控制。
●KEYOPT(7)=0,无控制。时间步大小不受预测影响。当自动时间步长激活,且允许一个很小的时间步长时,这个设置对大多数情况是合适的。
●KETOPT(7)=1,如果一次迭代期间产生太大的穿透,或者接触状态急剧变化,则进行时间步长二分。
●KEYOPT(7)=2,对下一个子步,预测一个合理的时间增量。
●KETOPT(7)=3,对下一个子步,预测一个最小的时间增量。
15.使用死活单元选项
面-面接触的接触单元和目标单元允许激活或杀死,而且也跟随其下伏单元的死活状态。能够在分析的某一阶段中杀死这个单元,而在以后的阶段再重新激活它。这个特征对于模拟复杂的金属成形过程是有用的,在此过程的不同分析阶段,有多个刚性目标面需要和接触面相互作用。回弹模拟常常需要在成形过程的后期移走刚性工具。这一选项不能用于“不分离”或绑定接触。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





