在CANopen总线上连接的伺服驱动只能做单轴的独立运动,不能做有关联的同步轴运动,例如做电子齿轮和电子凸轮的应用以及CNC的差补运动。因此,为了满足对同步运动的需求,在运动控制器上我们开发了专门做同步运动的CAN总线,称之为CANmotion总线,它的物理结构与CANopen总线一样,但具有设备的同步功能。这样就可以做多轴同步了。如图14-47所示,我们
●首先添加和组态CANmotion总线界面;
●在总线界面下添加驱动设备,如d3和d4;
●当然,在运动控制器中我们还能添加虚拟轴d1、d2。
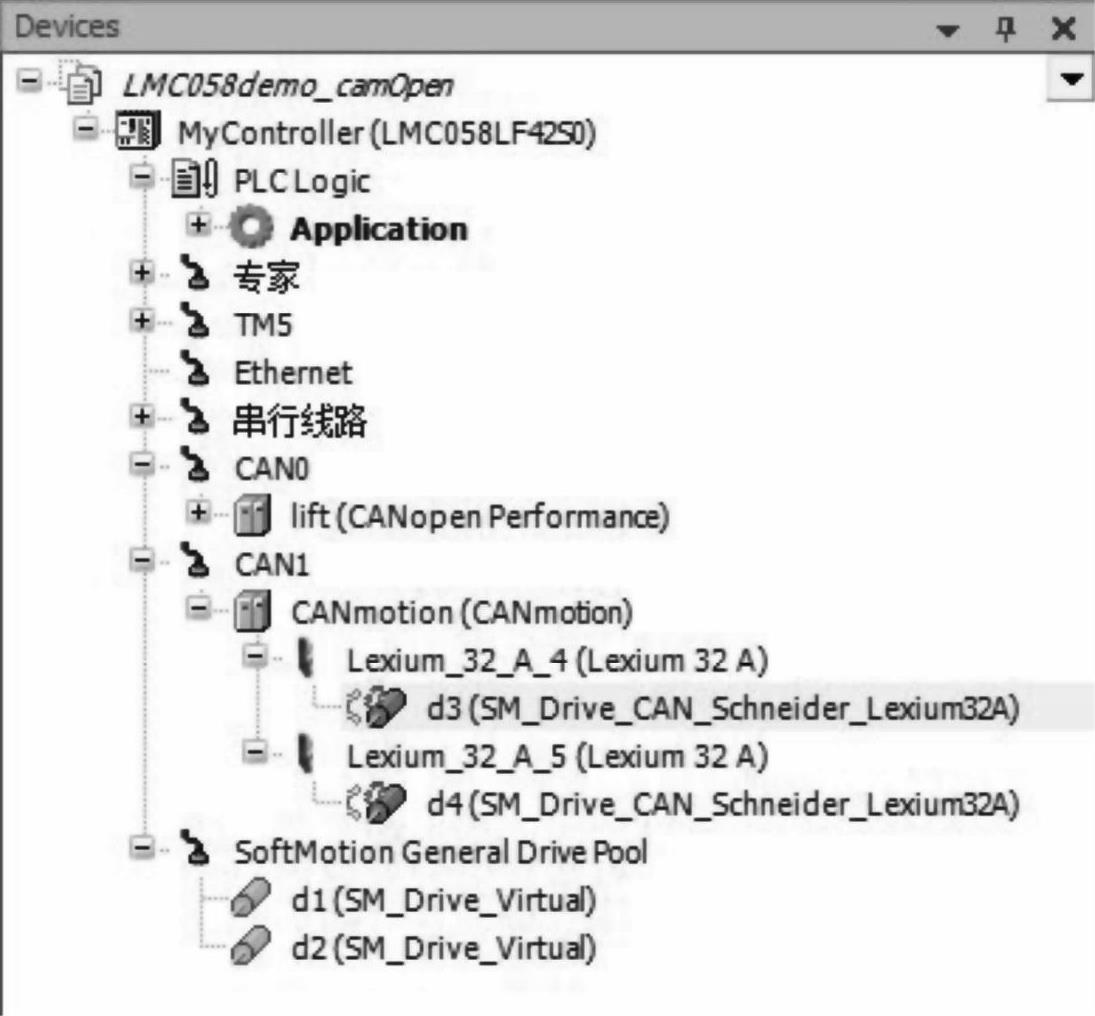
图14-47 CANmotion总线配置
在CANmotion总线,使用的运动控制库集群如图14-48所示。
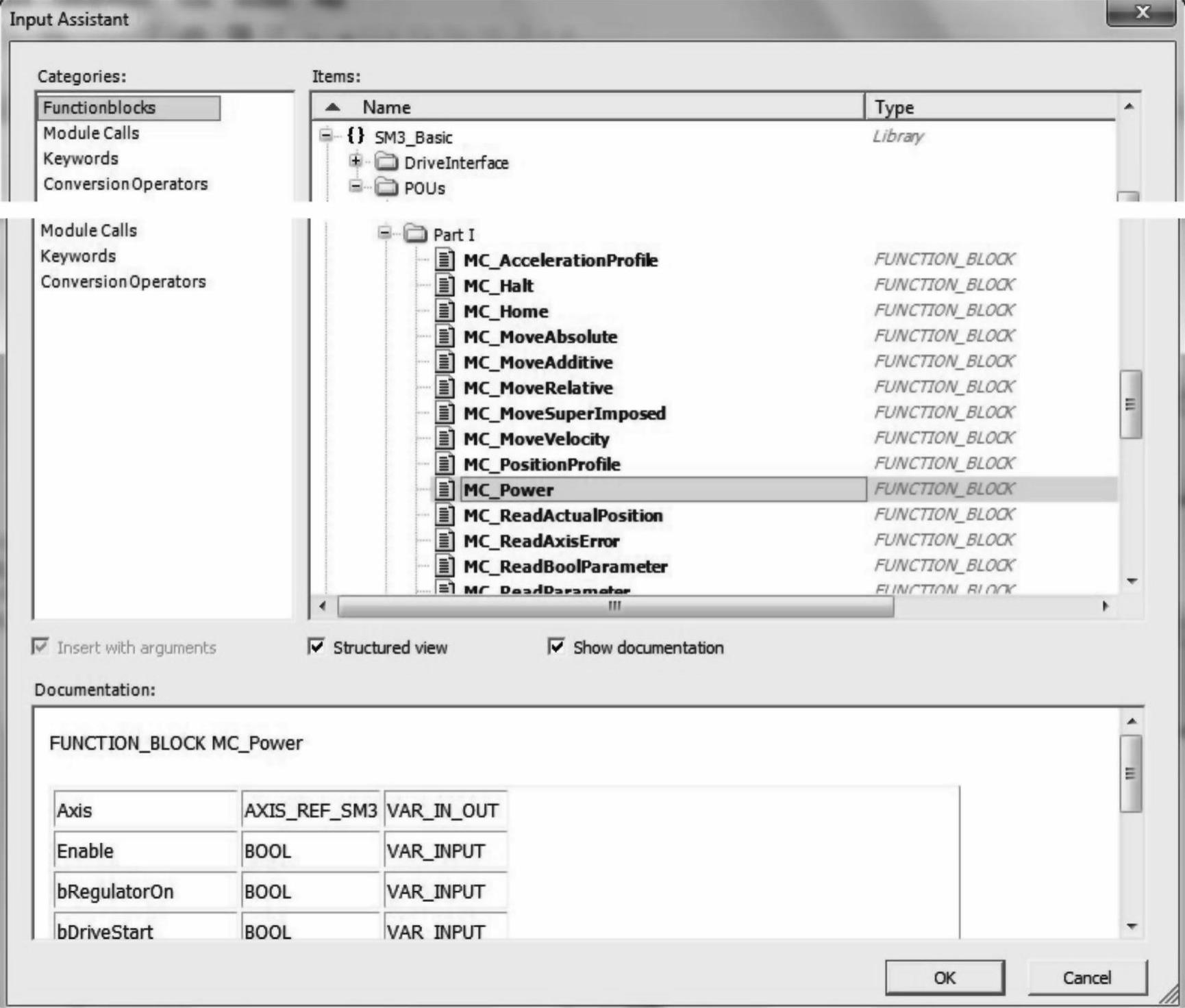
图14-48 在CANmotion总线上的伺服驱动功能库集群
例如,我们使能一个伺服轴,调入的功能块如图14-49所示。
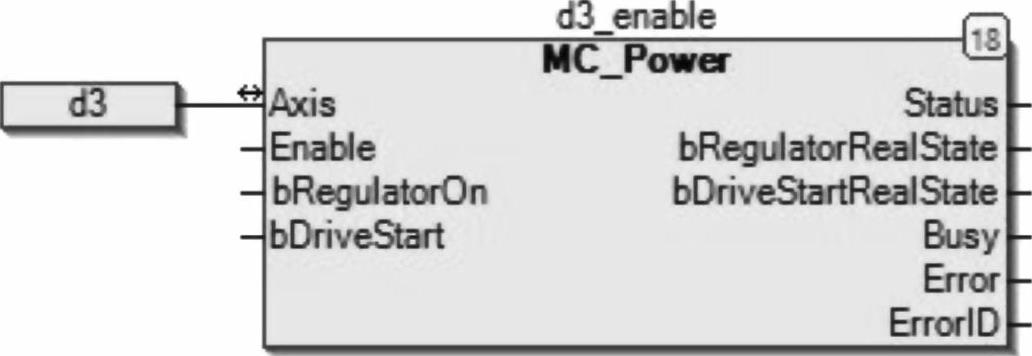
图14-49 使能一个伺服轴的功能块
我们看到在CANmotion总线下,使能一个伺服轴需要3个开关量,即需要顺序执行En-able、bRegulatorOn、bDriveStart。当我们需要两个轴或多个轴同步时,可以调用多轴同步功能集群下的功能块,如图14-50所示。
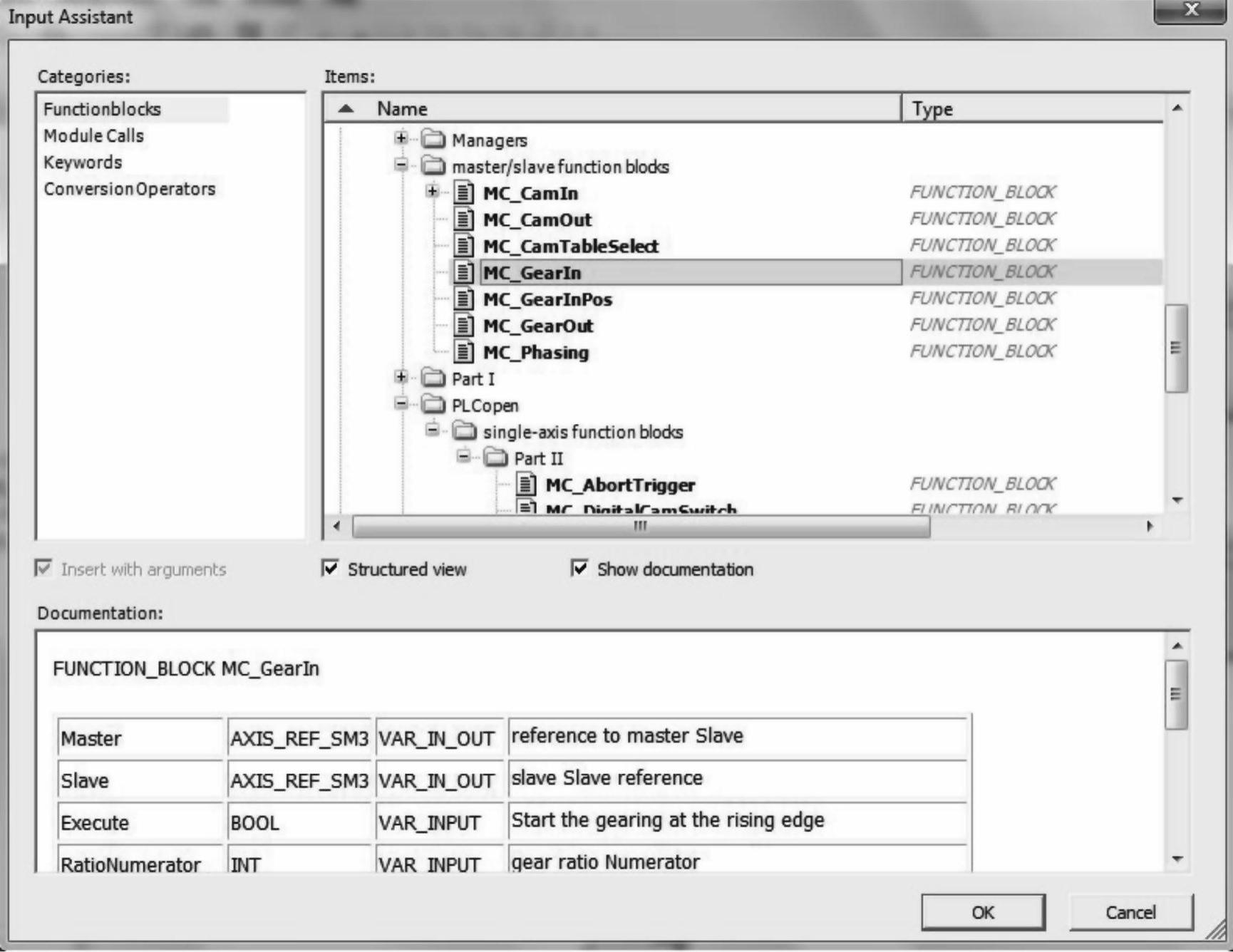
图14-50 同步功能块集群
例如,我们要使轴d3作为主轴,轴d4跟随轴d3运动。我们调入电子齿轮功能块如图14-51所示。(https://www.daowen.com)
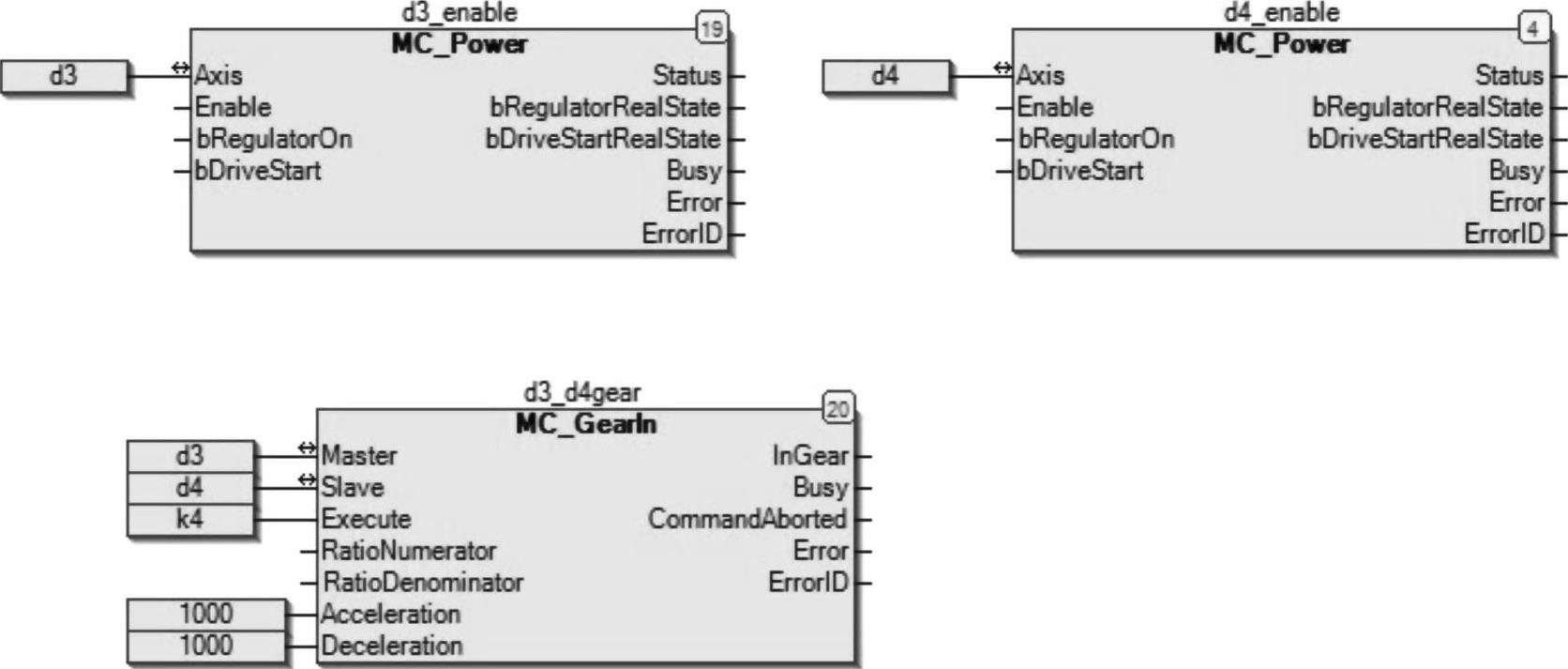
图14-51 电子齿轮功能块
把轴d3、d4使能后,只要把k4闭合,inGear输出为“真”则这两个轴就耦合了。这时轴d3运动,轴d4就跟着运动,跟随的距离比例由电子齿轮比决定,即参数RatioNumerator分子,参数RatioDenominator分母。这个比例是可以在线修改的。需要注意的是:通常在运动时,分母是不允许修改的,只能修改分子。
要使两个轴脱离耦合,我们可以使用如图14-52所示功能块。
在操作脱离耦合时,一种状态是静止脱离。即在主轴d3停止状态下,k5的上升沿触发离合,使主从轴分离。这时从轴d4也是停止的。脱离后轴d3可以单独执行各种运动。还有一种情况是轴d3在运动状态,从轴d4跟随运动,这时k5的上升沿触发离合,使轴d4脱离轴d3,这时的从轴d4是运动的,它的速度就是离合打开时的速度。耦合脱开后,轴d3速度再变化将不影响轴d4的速度变化。如果要停止轴d4的运动,就需要调入停止功能块来操作。
在同步功能集群中,还有一个功能是控制2个轴或多个轴的相位同步,即使几个轴的运动总是保持一个固定的位置差,这个功能如图14-53所示。
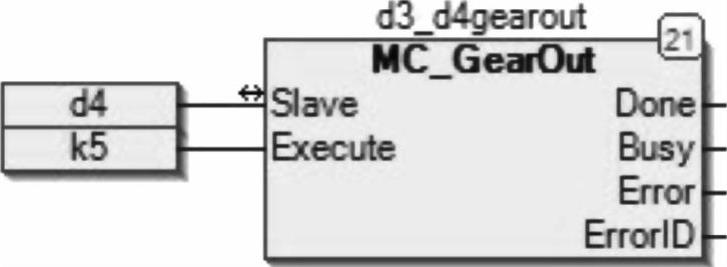
图14-52 脱离耦合功能块
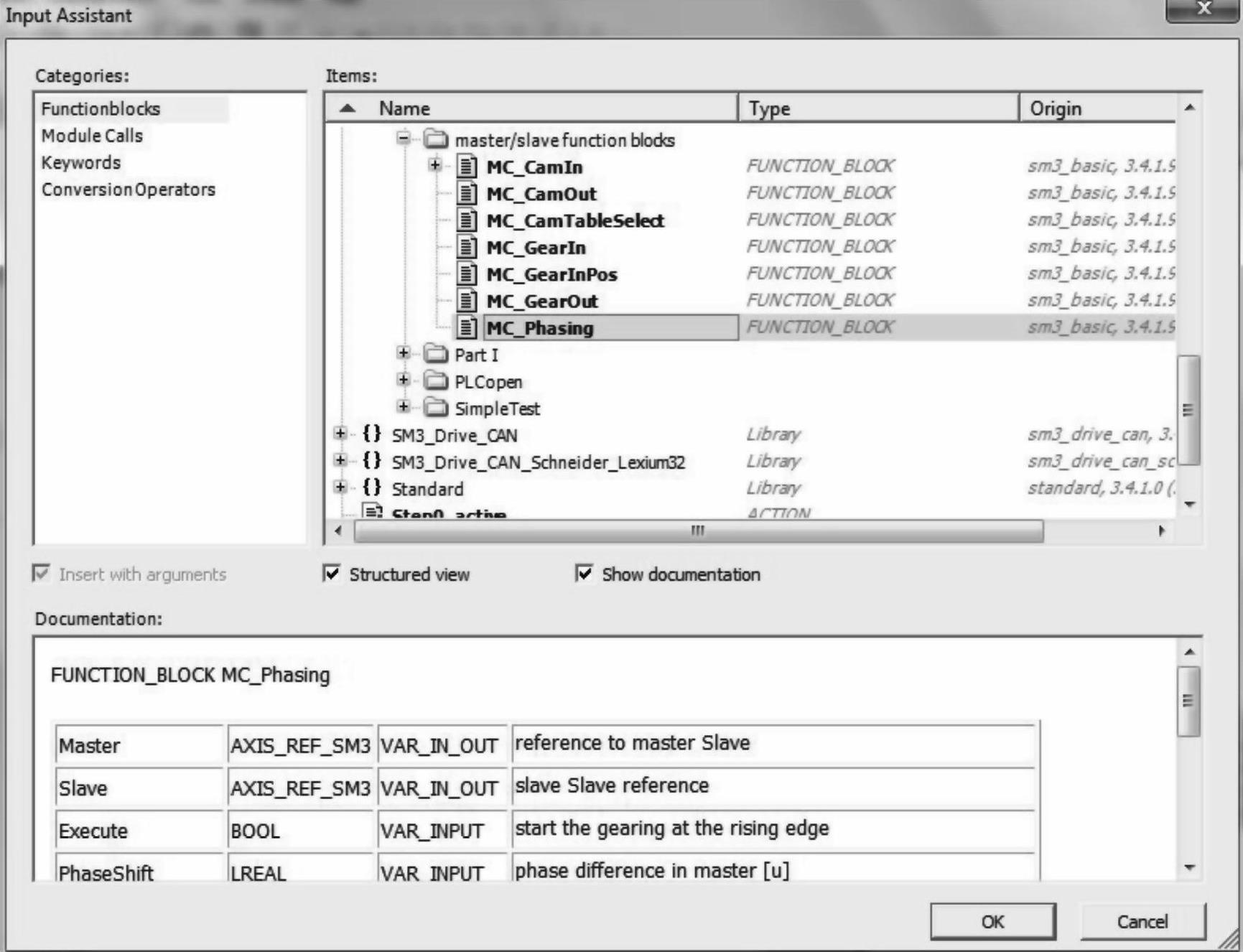
图14-53 相位同步功能
当k6闭合后,2轴耦合并使同步运动的相位差保持在90°,如图14-54所示。
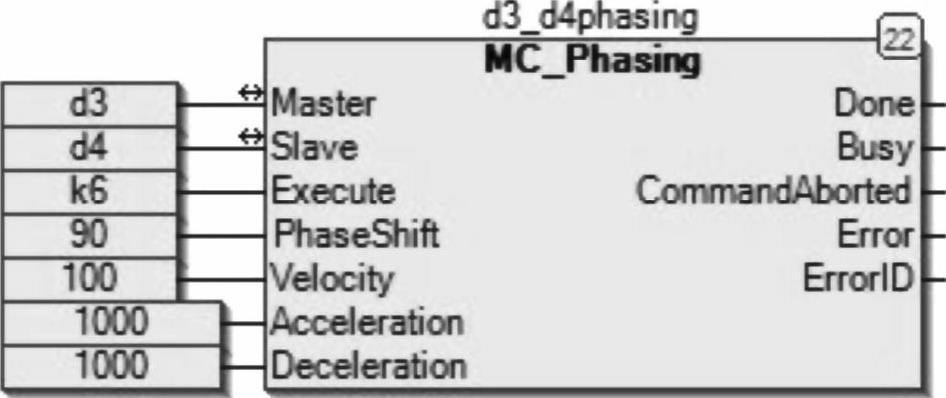
图14-54 相位差90°的同步
当修改相位差值后,需要k6再次闭合,使两个轴的同步达到新的相位差值。相位差值的修改是可以在线运行的。
当然,在同步运动类型中,还有CAM电子凸轮的运动和CNC差补运动,这些运动的应用我们将在《施耐德SoMachine控制器的应用及编程指南》高级篇中详细讲解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





