1.编辑一个开关量
在如图9-5所示程序结构中,我们把k1编辑到可视界面上。通过对k1的操作,可以对程序流进行控制。
在设备菜单,在应用Application处,点击鼠标右键打开添加对象-视图,如图9-6所示。
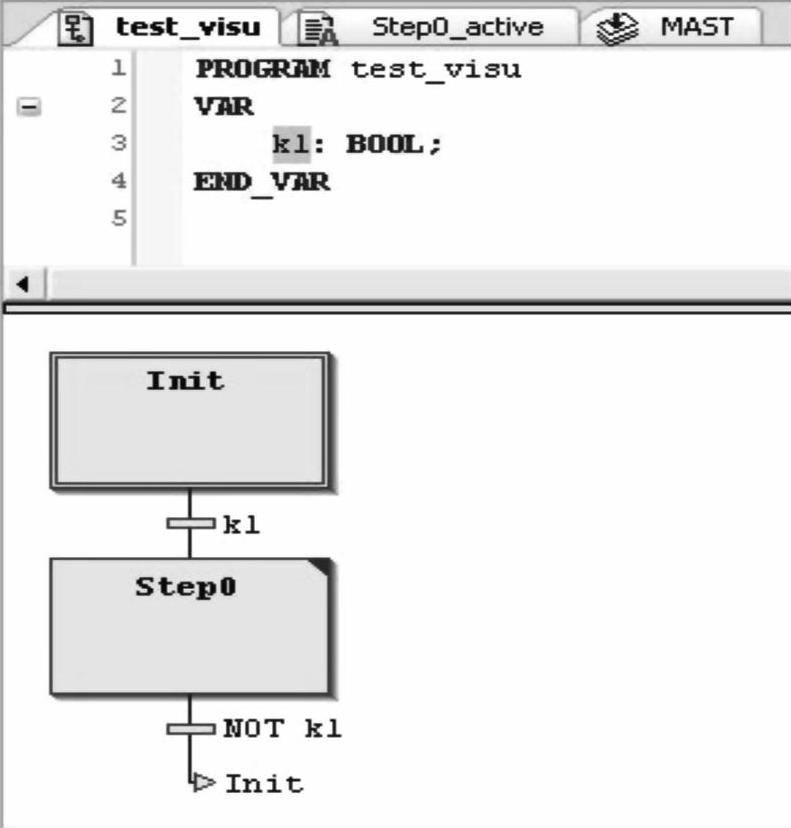
图9-5 程序结构中k1的动作
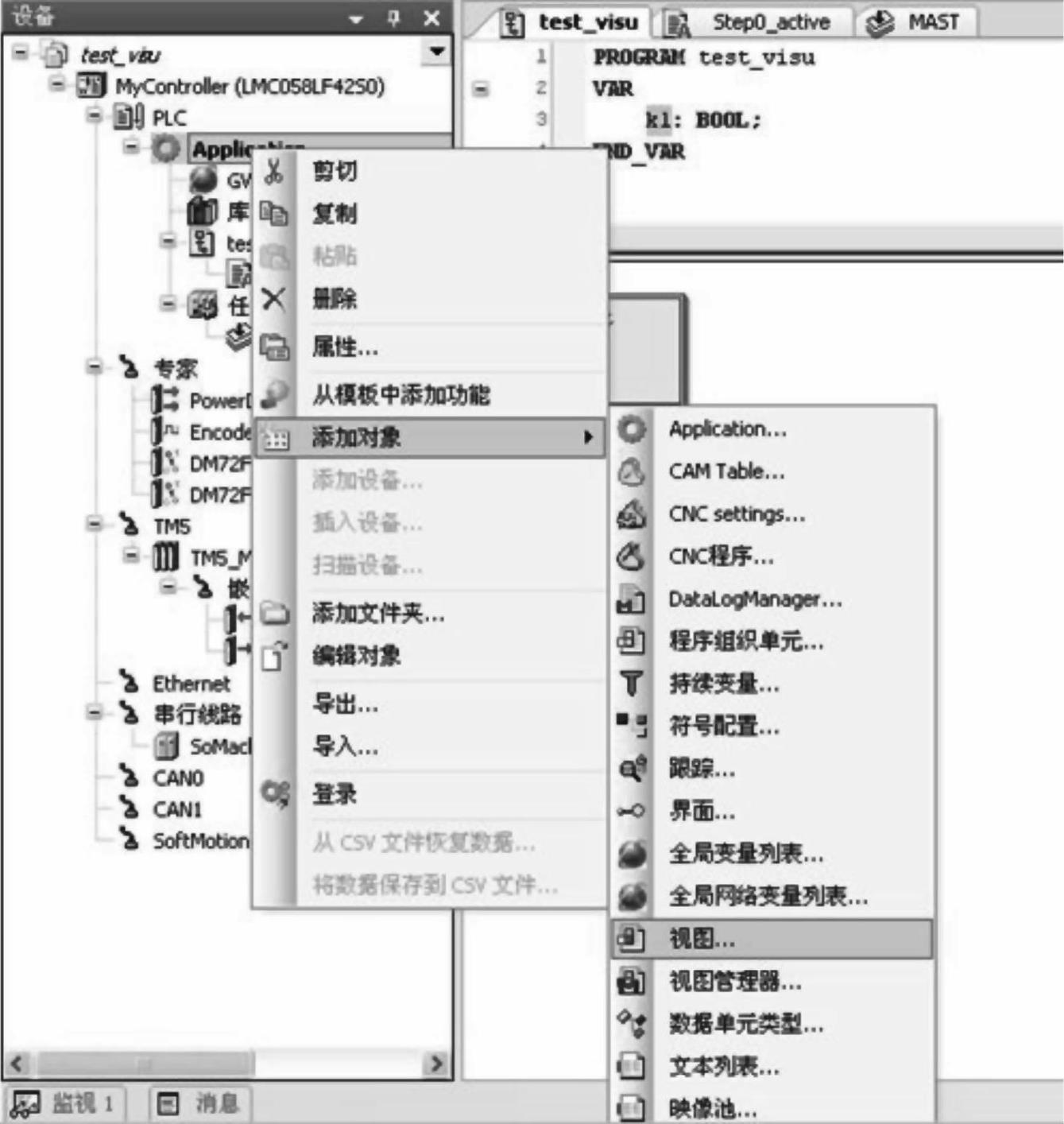
图9-6 添加视图
点击视图,打开如下界面,如图9-7所示。
图9-7 创建视图
给视图命名,然后点击打开,出现如图9-8所示编辑界面。
图9-8 视图画面编辑区
点击右侧工具箱,在打开的工具箱栏目下,选择一个画圆图标
 ,如图9-9所示。
,如图9-9所示。
按住鼠标左键,把选中的图标拖到视图编辑区内放开,如图9-10所示。
选中图标元素,然后打开属性框,如图9-11所示。在属性框中,点开色彩栏Colors,在Fillcolor框内颜色菜单中选择需要的色彩,例如:红色;在报警状态栏Alarmstate的框内颜色菜单中选择所需要的颜色,例如:绿色;在文本栏目Texts写入要控制的开关k1,如图9-12所示。

图9-9 打开工具箱选中图标
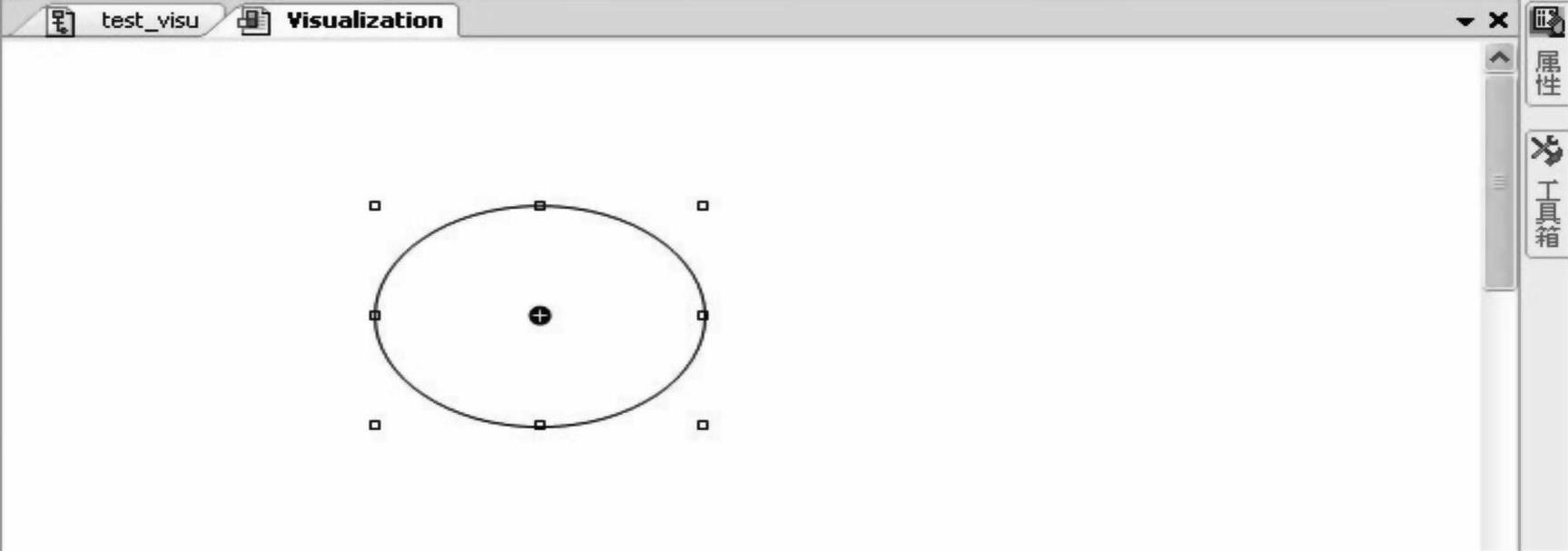
图9-10 把编辑元素拖到编辑区
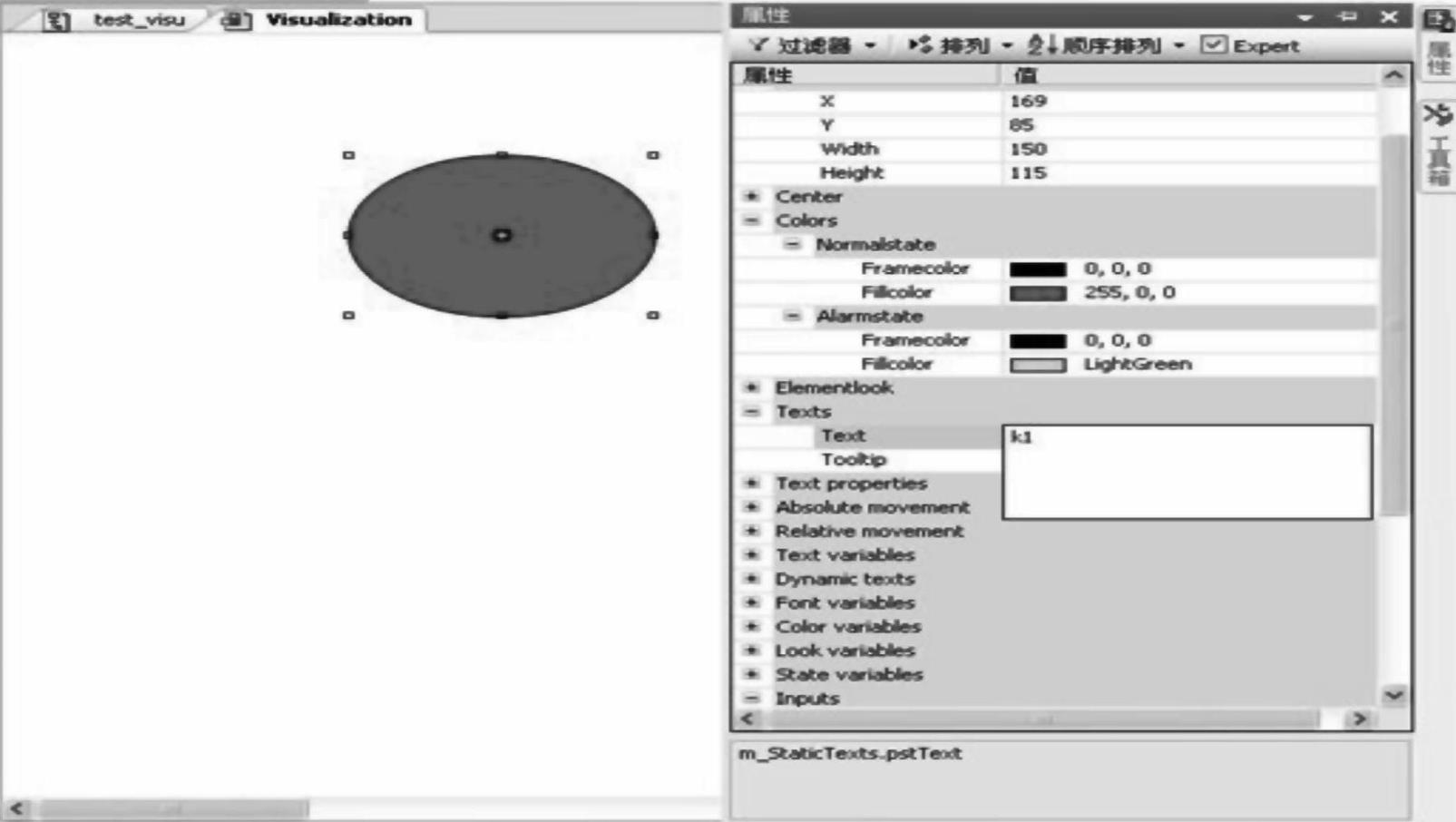
图9-11 打开元素属性,填写属性内容
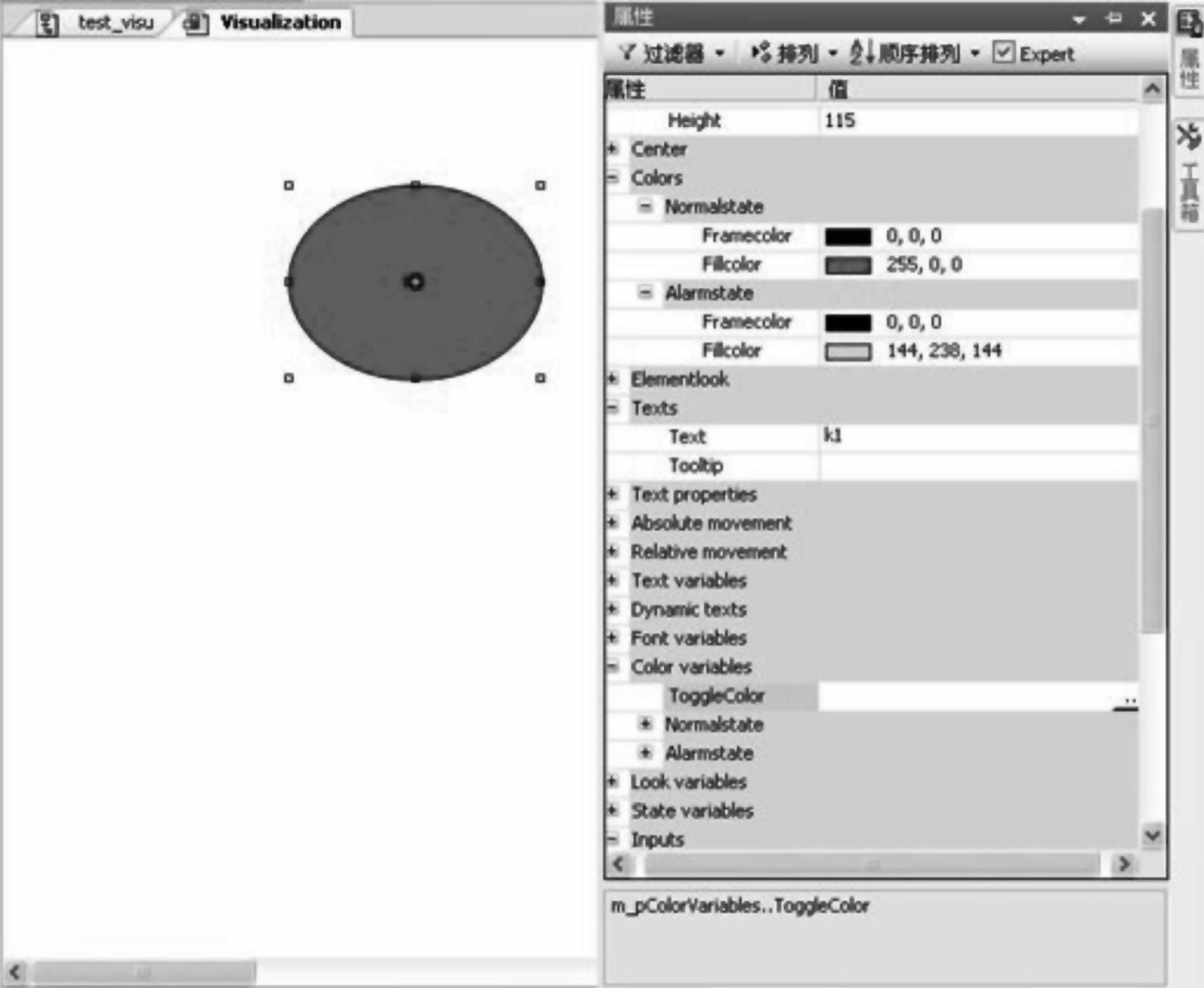
图9-12 打开元素属性,填写改变色彩的变量
如图9-13所示,打开颜色变量栏目,选择“ToggleColor”,点击右侧助手框,打开输入助手。
在输入助手框中,选择改变颜色的变量k1,并按“确定”。
同理,点开输入“Inputs”,填写所编图标的输入要改变的变量k1,如图9-14所示。
这样,我们就完成了对一个开关k1的编辑。我们可以用仿真来测试一下。
打开程序仿真并运行,如图9-15所示,这时程序处于初始化阶段。
点击图标k1,则使图标变绿,即使能了k1,如图9-16所示。这时程序扫描进入Step0阶段。通过这个开关,我们看到了对程序流的控制。
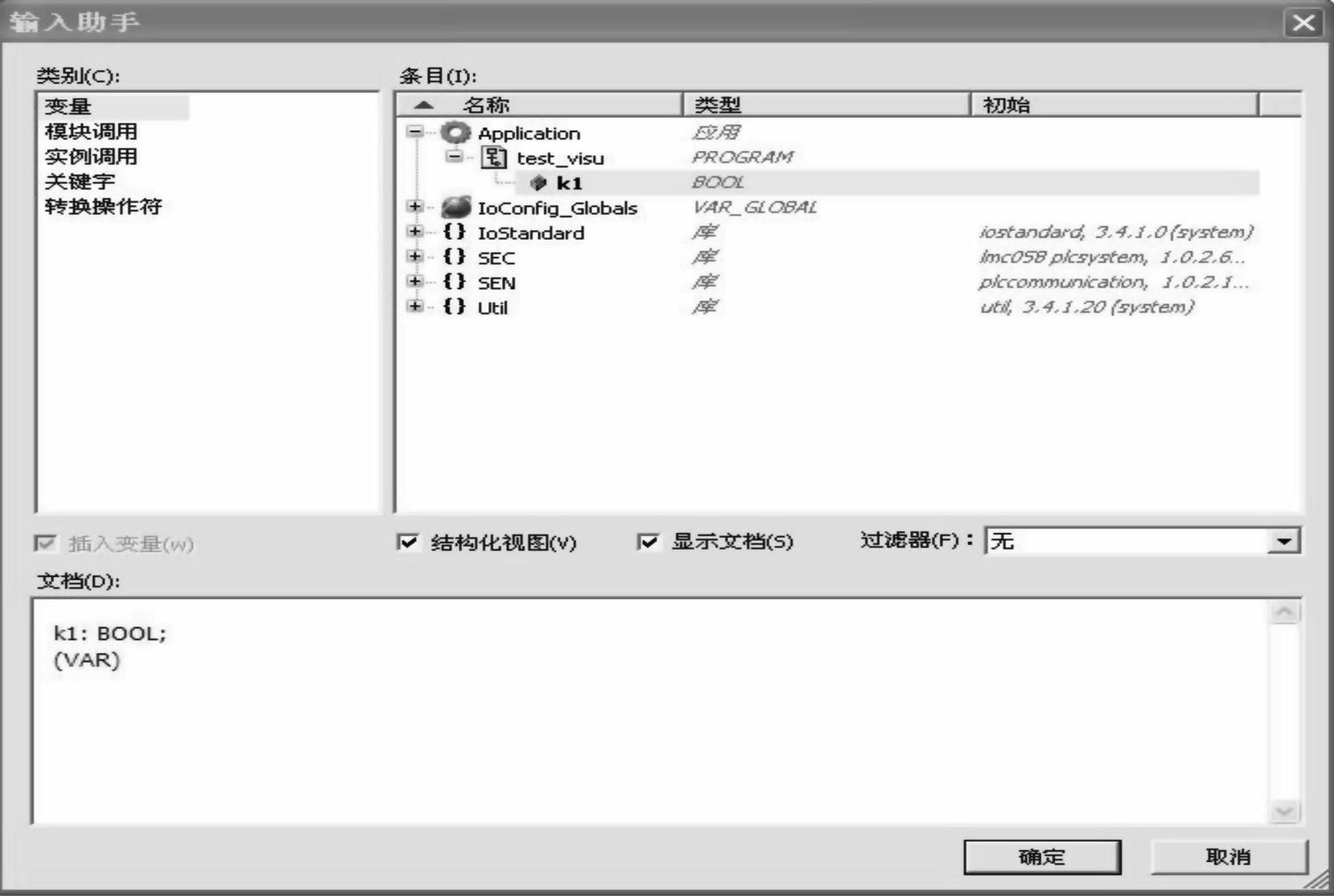
图9-13 选择改变颜色的变量k1
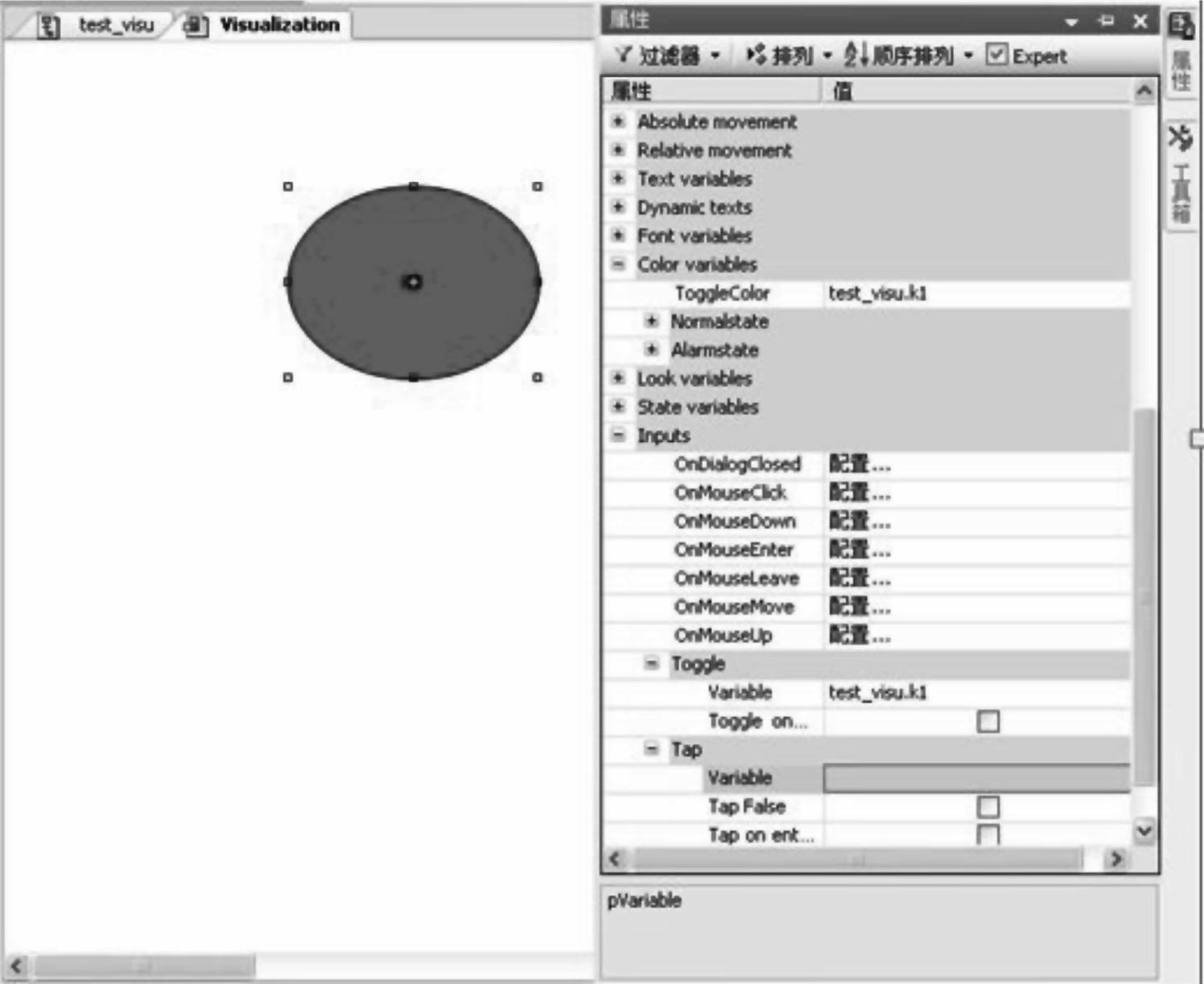
图9-14 确定后,变量填入“ToggleColor”和“ToggleVariable”栏目
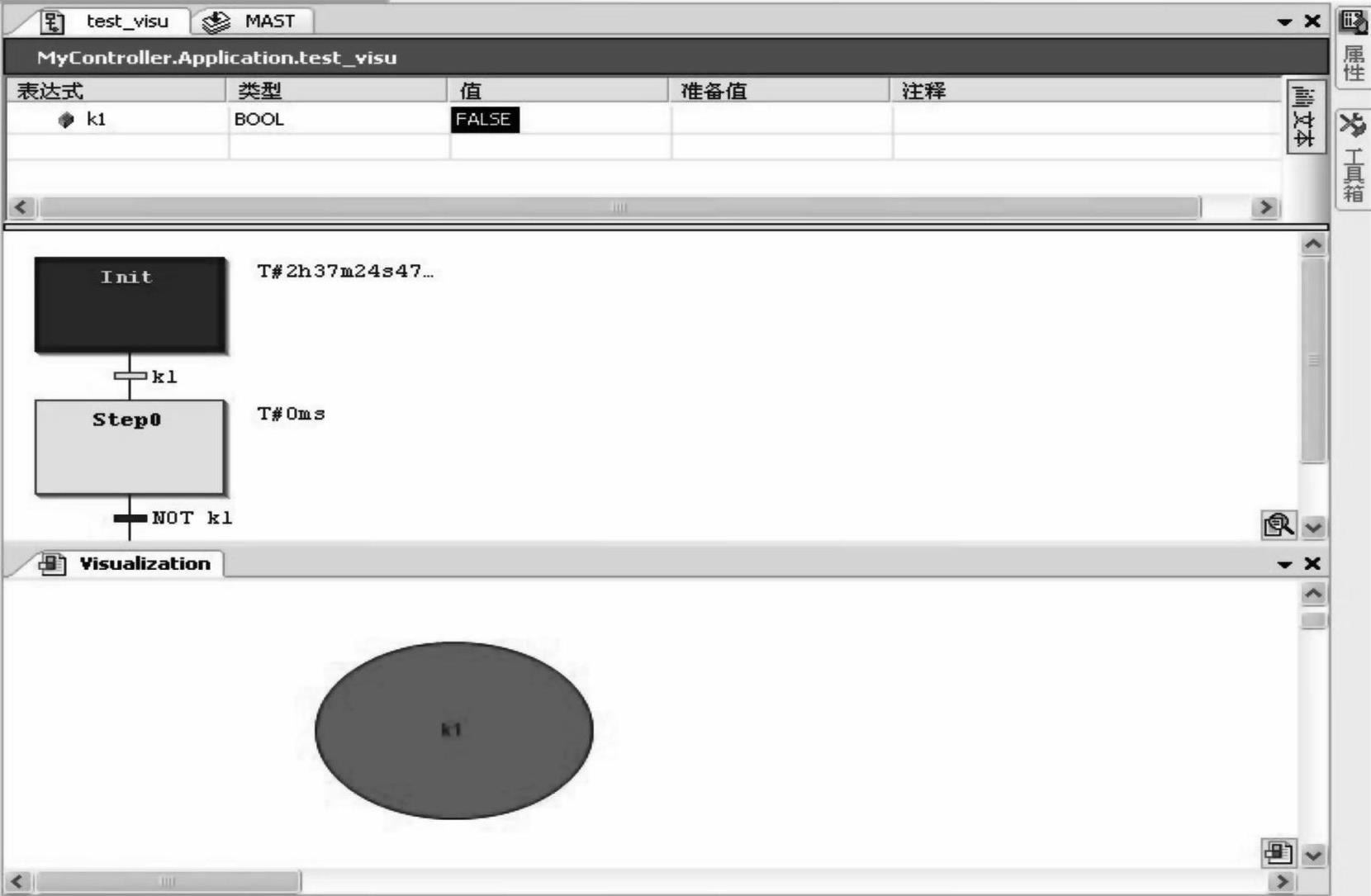
图9-15 开关k1处于打开状态
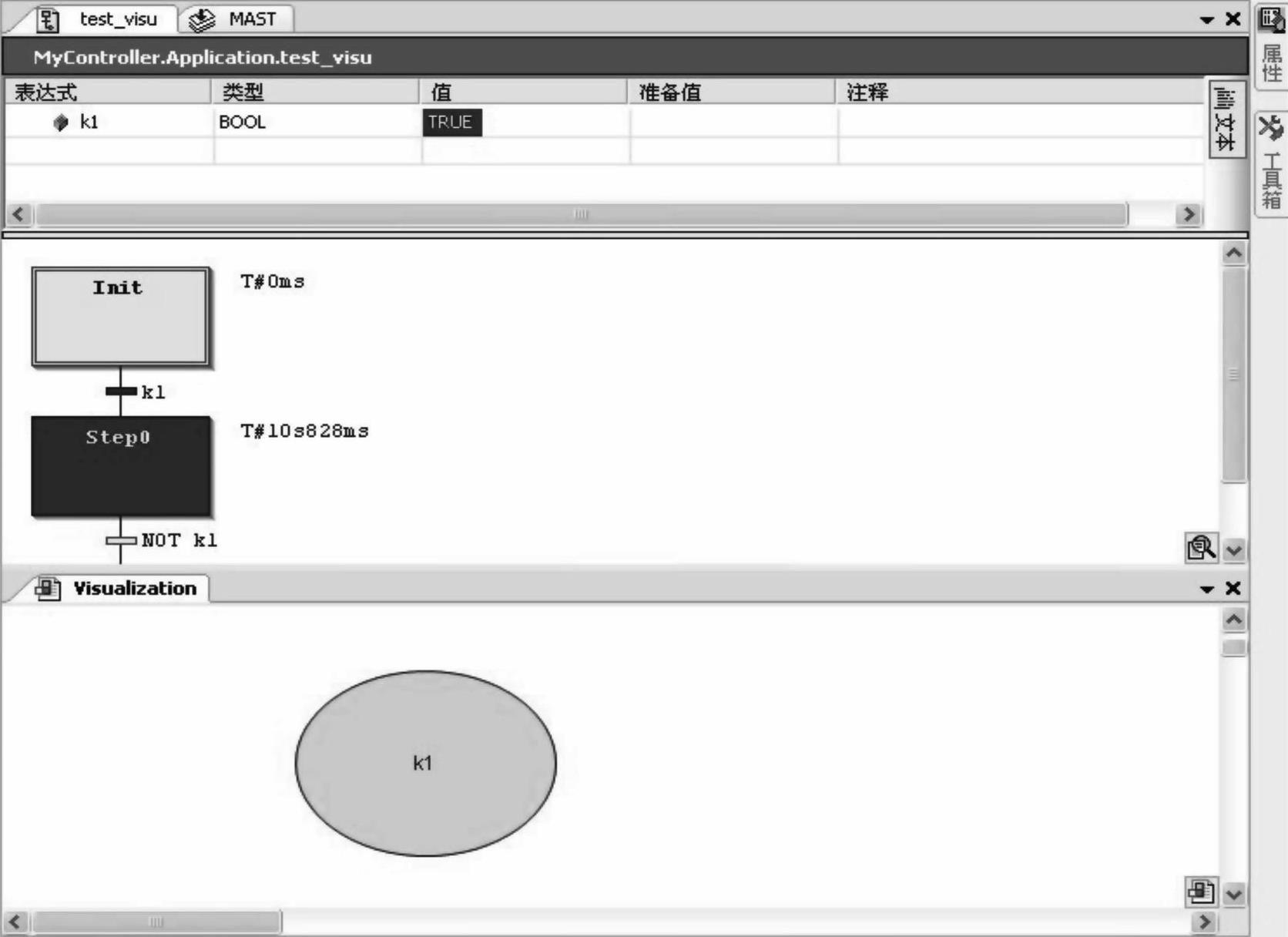
图9-16 开关k1处于关闭状态
2.编辑一个显示和输入界面
在程序Step0阶段,调上一个曲线发生器。我们设计一个界面,通过界面可以对曲线的幅值amp进行修改,同时通过界面观察输出s1的变化。视窗和程序结构如图9-17所示。
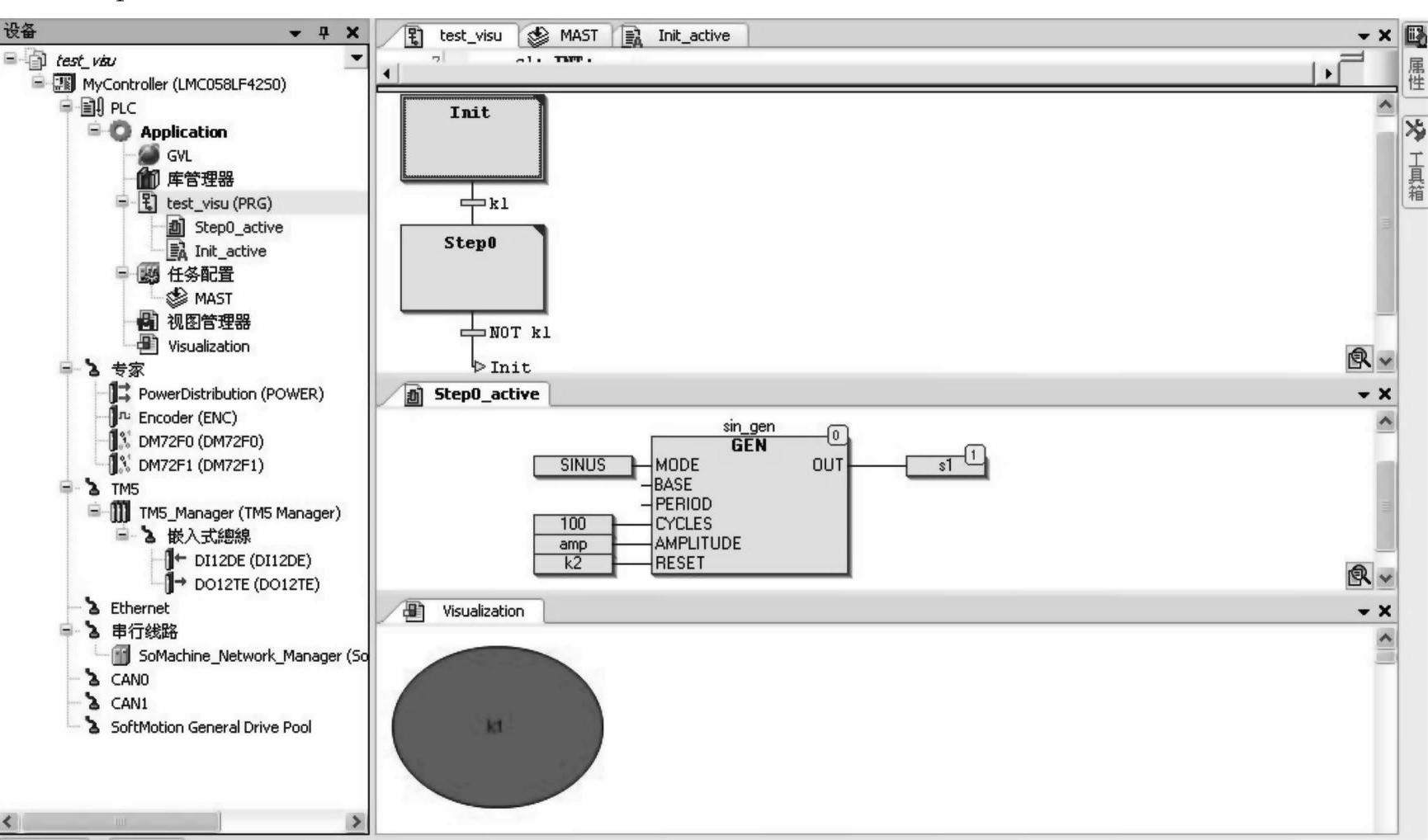
图9-17 视窗和程序结构
在视窗中,我们可以再重复一下建立k1的过程来建立开关k2,也可以采用复制-粘贴k1的方式来建立k2。复制-粘贴的方式如下:点选视窗中的k1,按“Ctrl+C”即复制快捷键,然后再按“Ctrl+V”即粘贴快捷键。这样在视窗中就复制了k1,如图9-18所示。
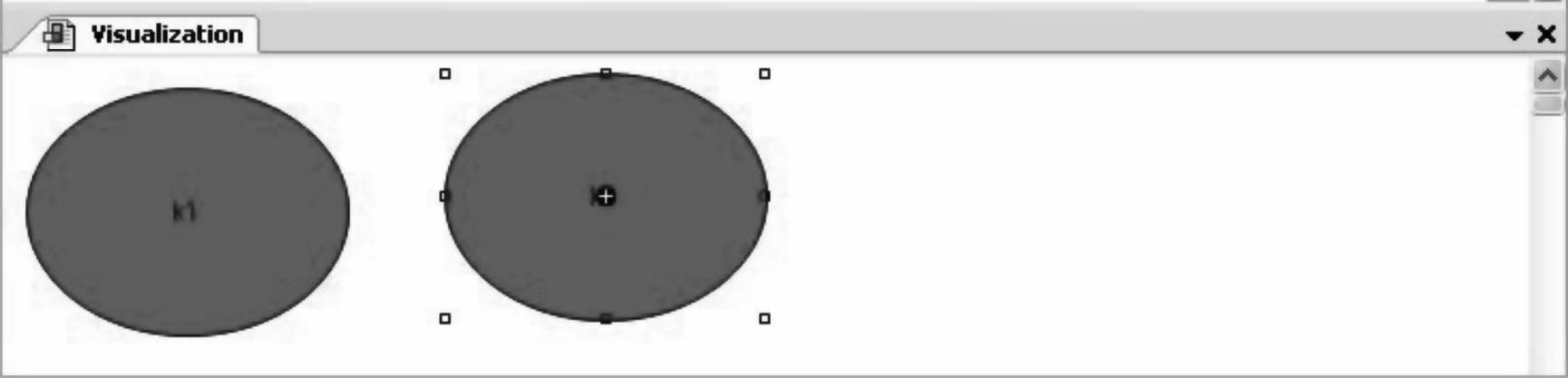
图9-18 在视窗中复制k1
然后打开图形的属性,修改文字为k2,修改引起颜色变化的变量k2和输入导致变化的变量k2,如图9-19所示。
打开工具箱,选择一个长方形图标 ,把它放置在视图界面编辑区,如图9-20所示。
,把它放置在视图界面编辑区,如图9-20所示。
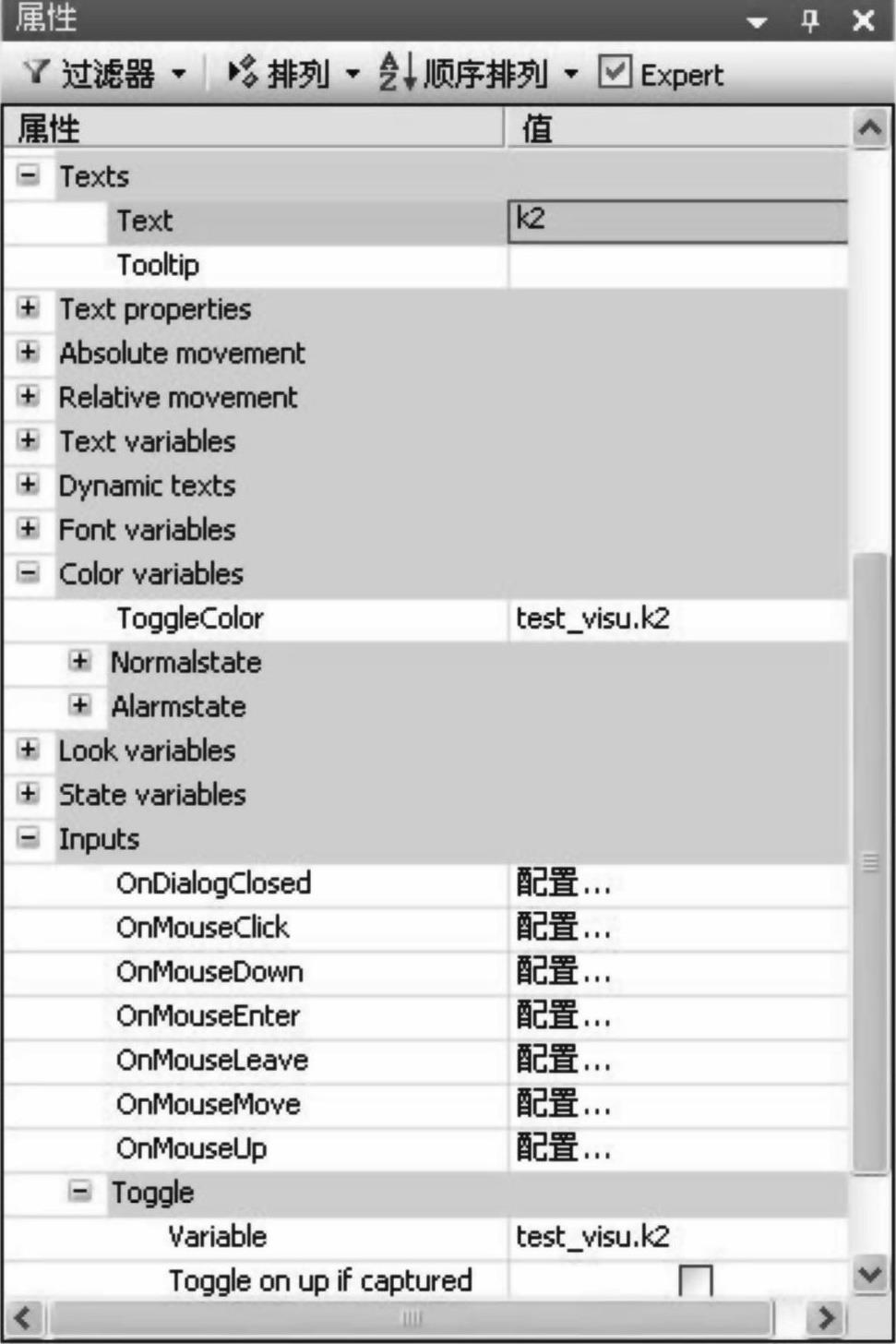
图9-19 修改元素属性
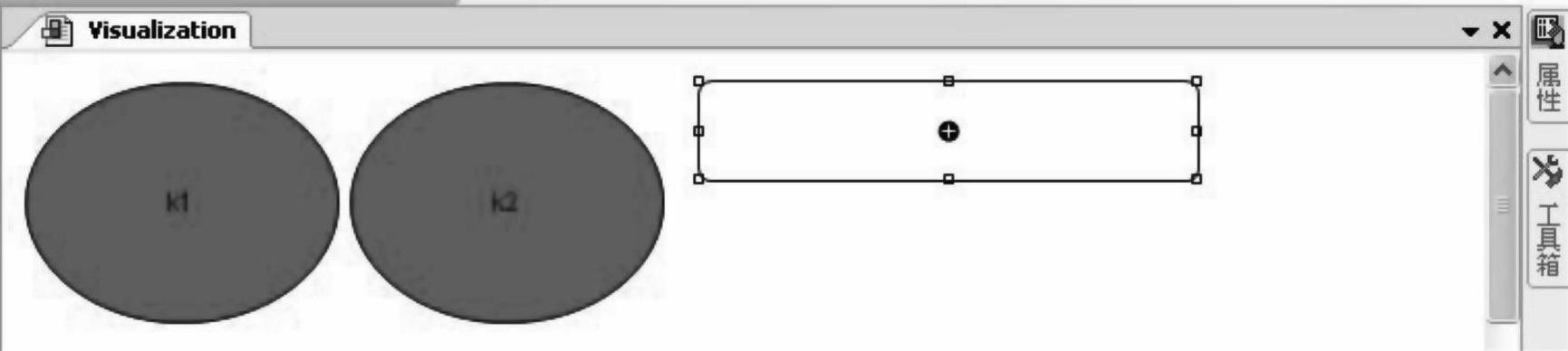
图9-20 打开工具箱调入一个矩形框
然后,点击“属性”,打开属性框,建立一个曲线输出s1的显示。属性的填写如图9-21所示。在颜色栏,选择框内背景颜色为黄色。在文字栏,写入“s1%s”,百分号前是显示名,百分号后是字符串输出,即s表示字符串String,注意百分号后的字符要小写。当然,如果要显示其他类型的变量,则百分号后的字符是不一样的。如常用的%f浮点数;%0.2f浮点数并且保留小数点后2位;%d或%i十进制数;%b二进制数等。
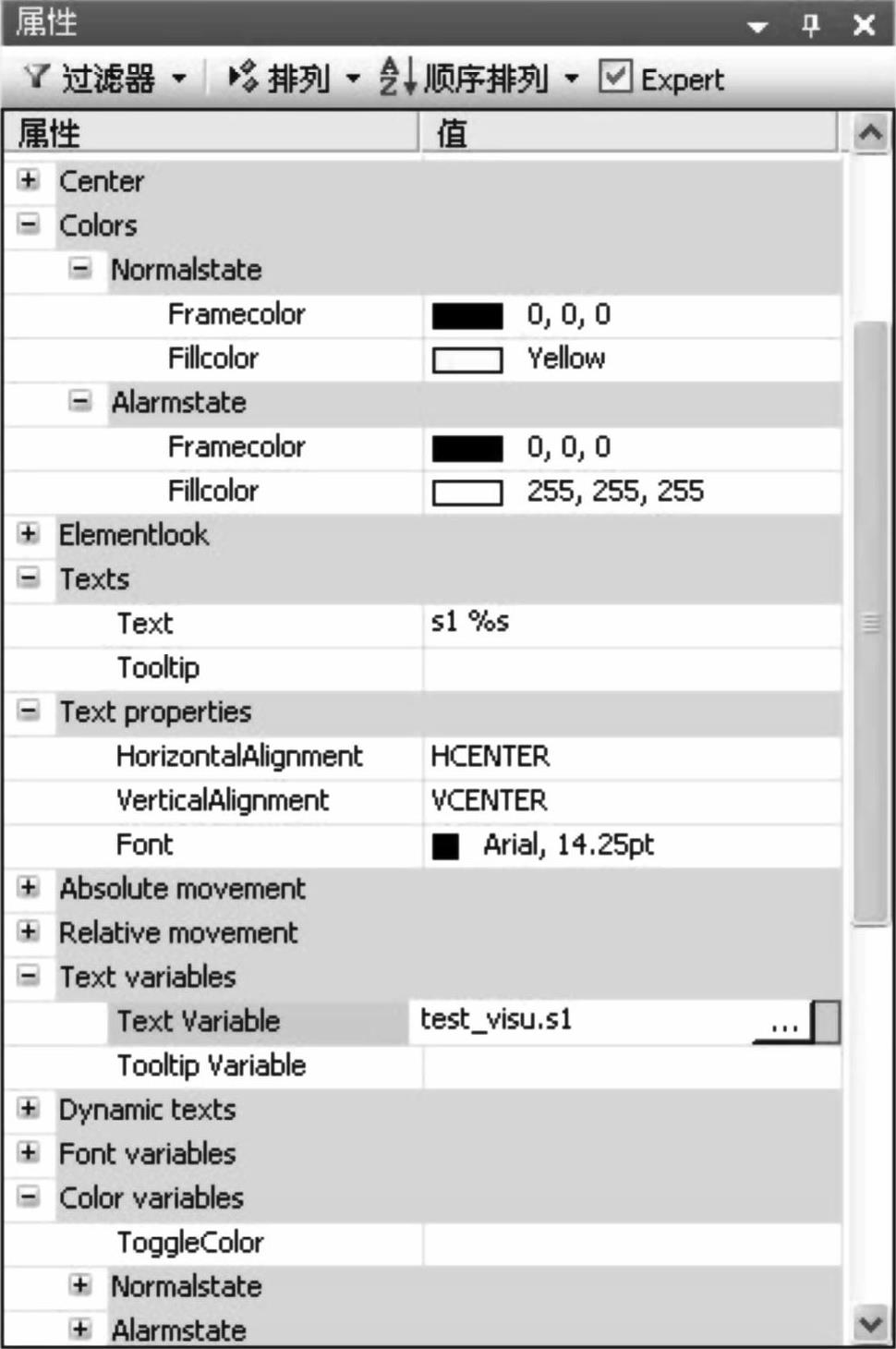
图9-21 显示框属性的填写
在文本变量栏,填入要显示的变量。这个变量的写入也可通过点击右侧的输入帮手,来选择要显示的变量。例如选择“test_visu.s1”。这样就完成了对变量s1的输出值变化显示,如图9-22所示。

图9-22 输出变量显示
仿真运行,如图9-23所示。
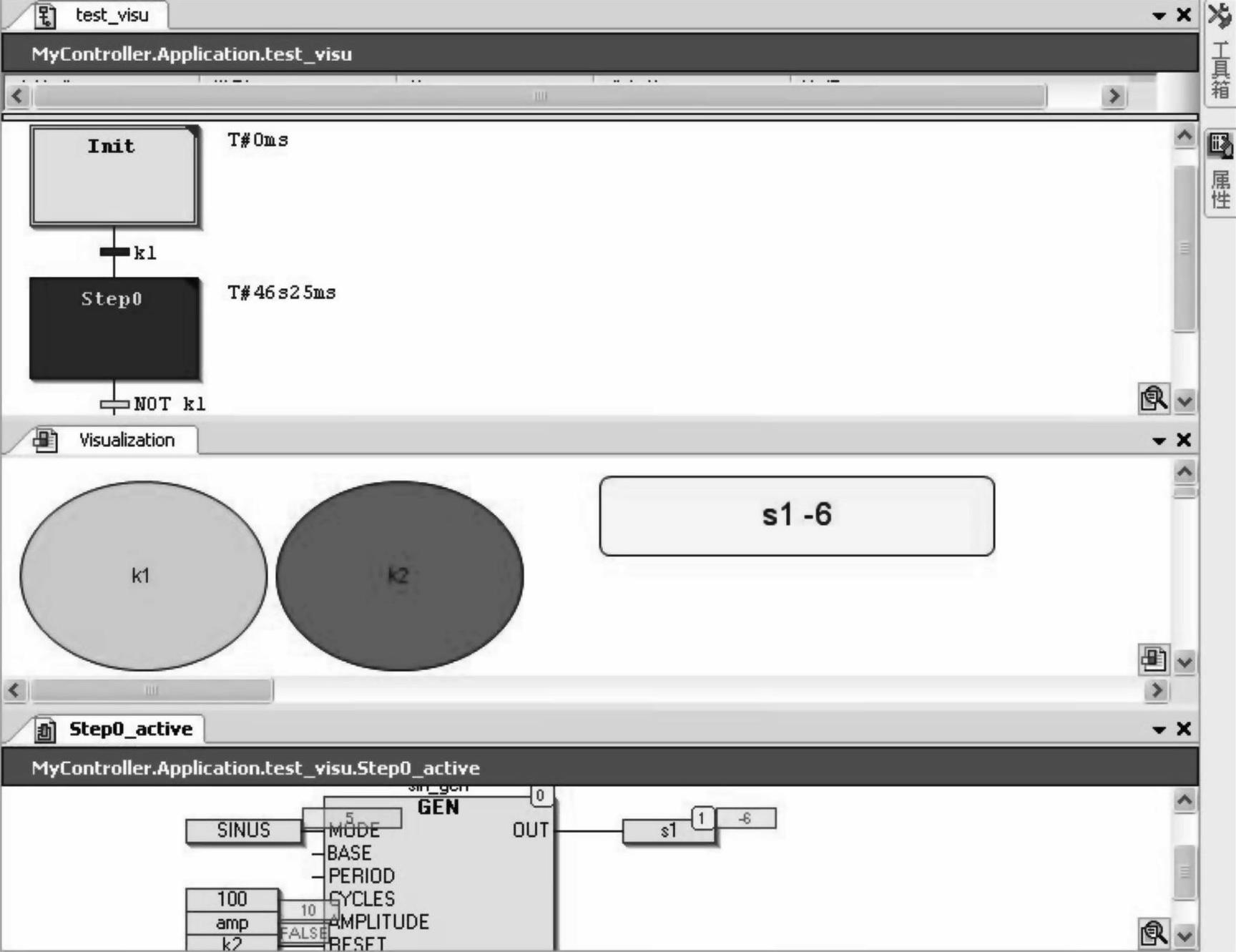
图9-23 仿真运行观察到的s1情况
再次打开工具箱,选择一个长方形图标 ,把它放置在视图界面编辑区,如图9-24所示。
,把它放置在视图界面编辑区,如图9-24所示。
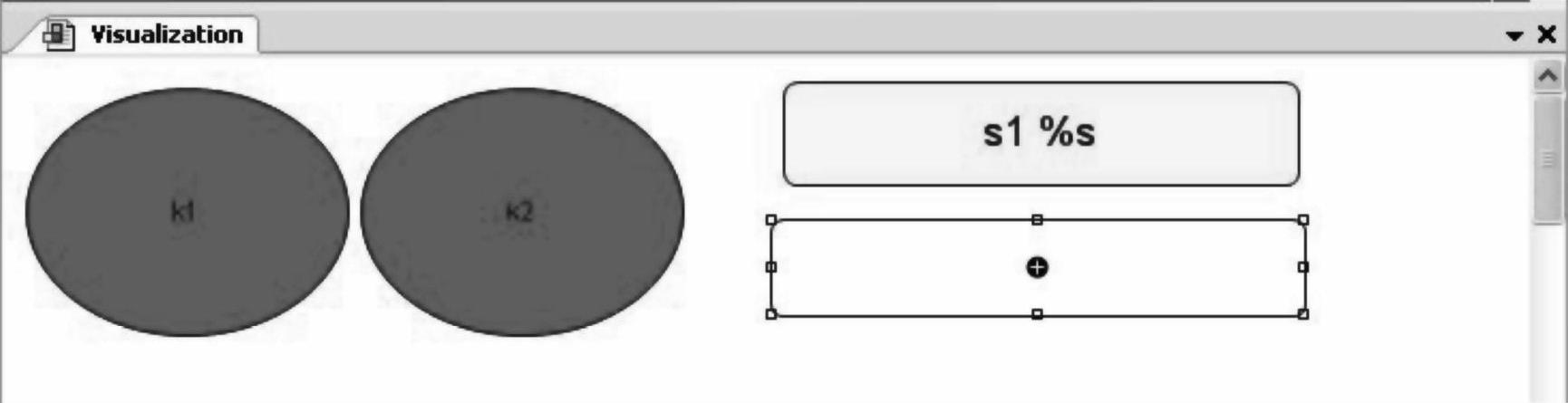
图9-24 调入一个矩形框建立输入界面
打开相应属性框,建立一个对曲线幅值amp的赋值界面,如图9-25所示。在这个属性界面,我们在颜色Colors栏,选择背景色为黄色。在文本栏Texts填写“amp:%i”表示要输入的变量名是:amp,由于这个变量是“INT”类型,因此百分号后是“i”。在文本变量栏TextVariable,点击右侧的输入助手,可在输入助手的变量栏目找到要赋值的变量,选定后,按“确定”,即自动把变量test_visu.amp填入栏内。
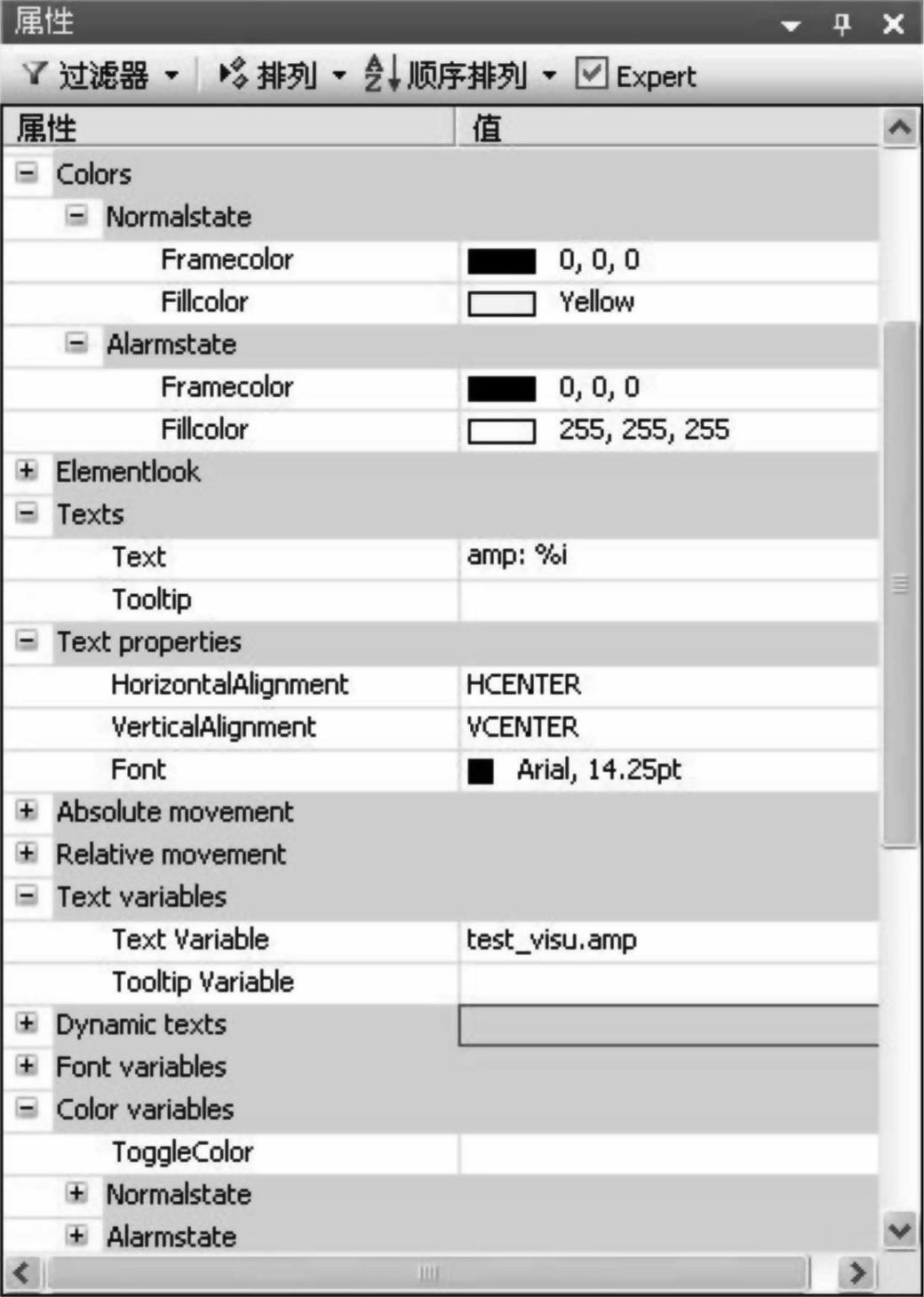
图9-25 输入界面的属性
填好上述栏目后,作为输入功能,还要建立一个输入Inputs。所以把属性菜单下拉,开启一个输入的配置。如图9-26所示,在输入部分,给出了输入的各种方式,根据需要可选择一种方式。例如:选择点击鼠标 配置…。
配置…。
点击所要方式的配置栏,打开如图9-27所示界面。
在这个界面中,给出了输入动作的各种执行方式,我们选择“写变量”,即选中“写变量”,然后点 ,把它导入右侧,如图9-28所示。
,把它导入右侧,如图9-28所示。
在右侧写变量下的编辑类型栏,可以使用下拉菜单,选择可视数字对话板来输入变量数值。选择使用另一个变量后,激活下部的变量栏。通过点击右侧的输入助手,选取要赋值的变量。按“确定”后,完成对输入的配置组态,如图9-29所示。
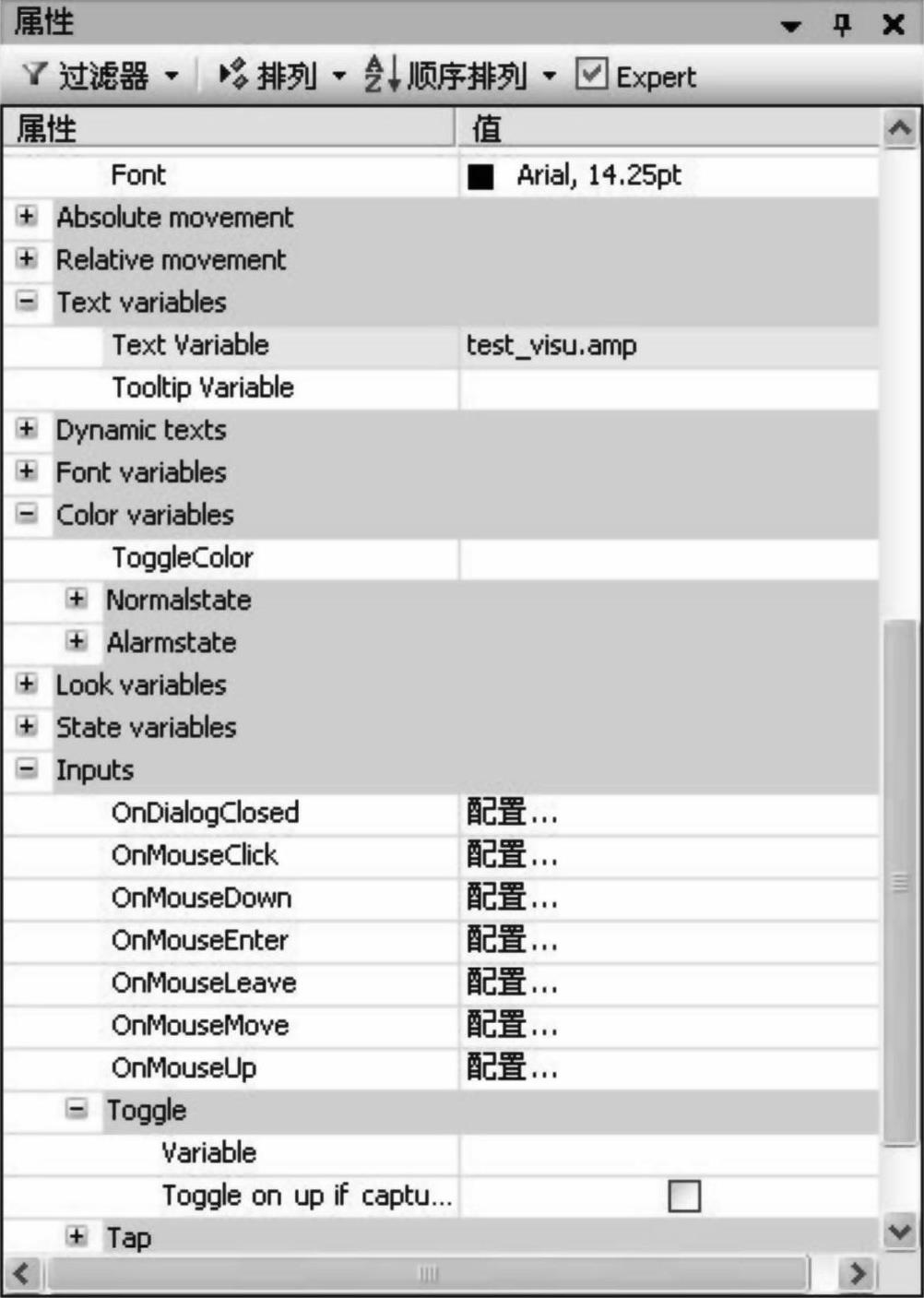
图9-26 配置输入
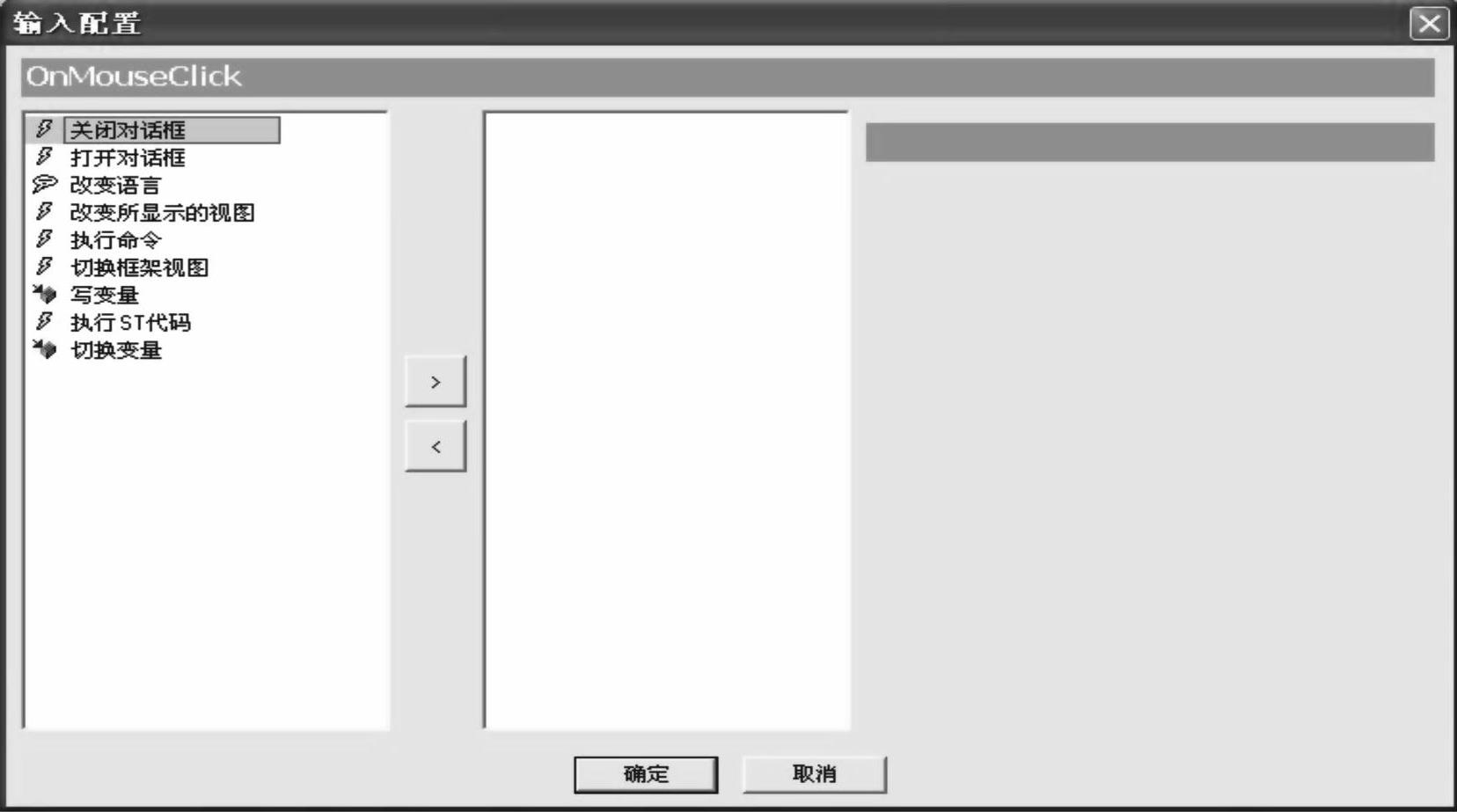
图9-27 输入配置框
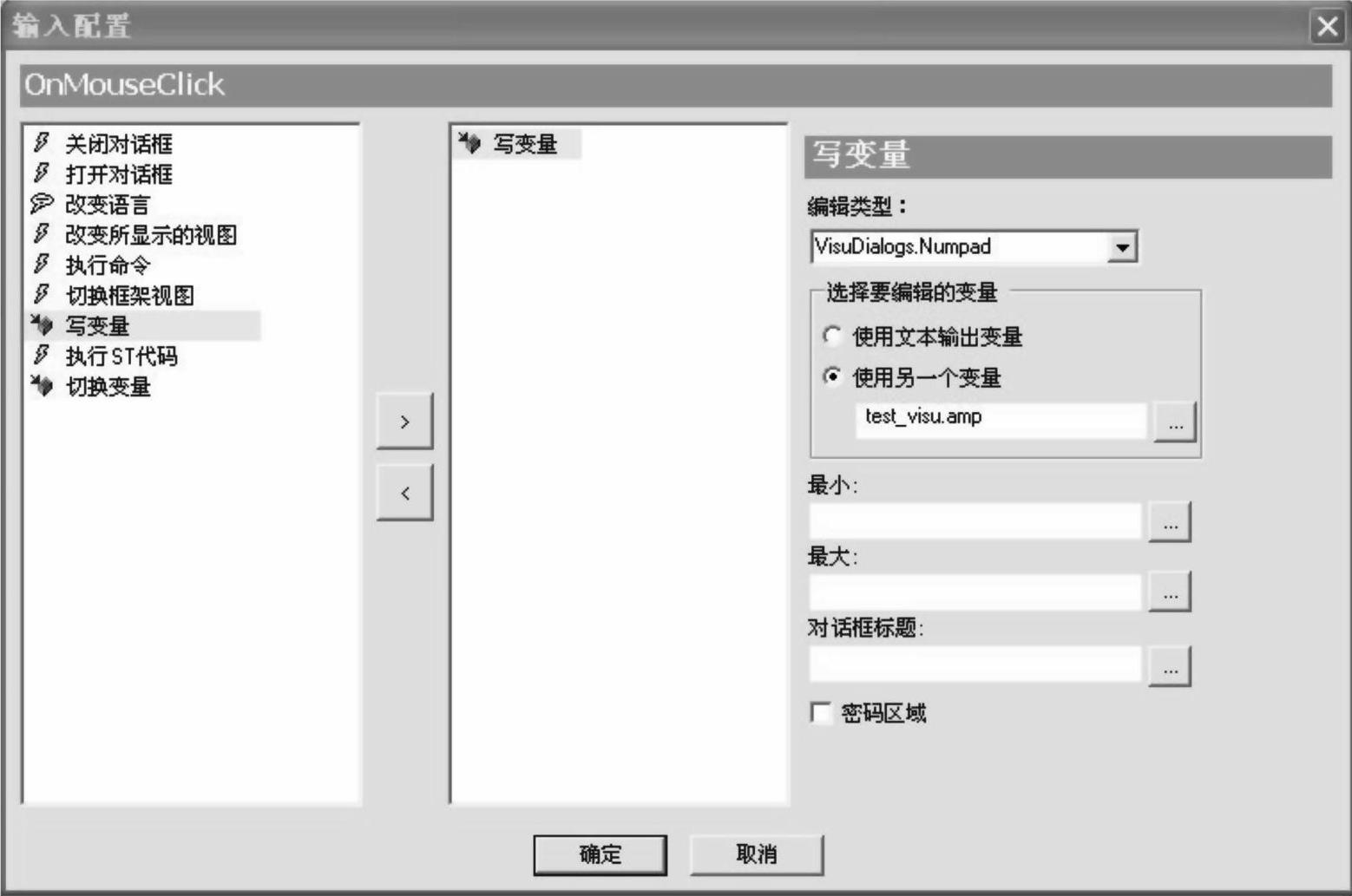
图9-28 输入配置的组态

图9-29 输入配置完毕
编辑完后的视图如图9-30所示。
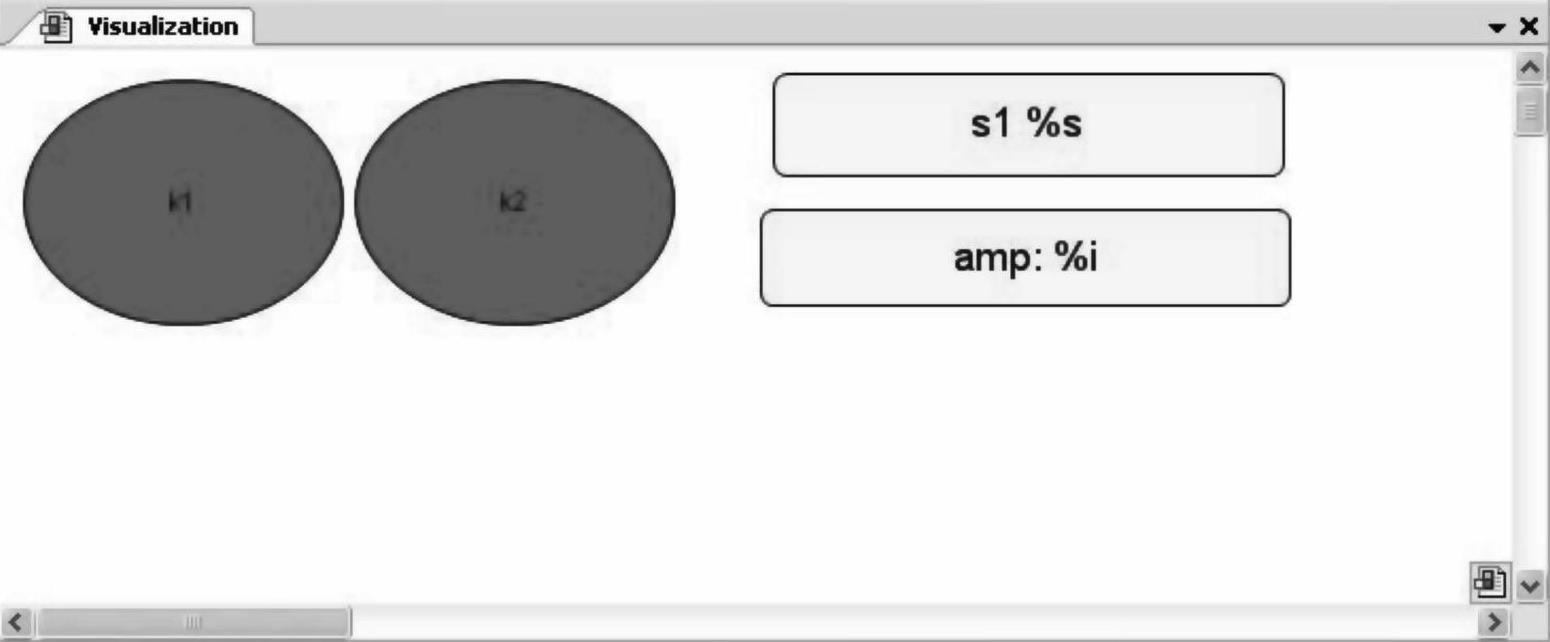
图9-30 视图编辑完毕
没修改曲线幅值的仿真如图9-31所示。
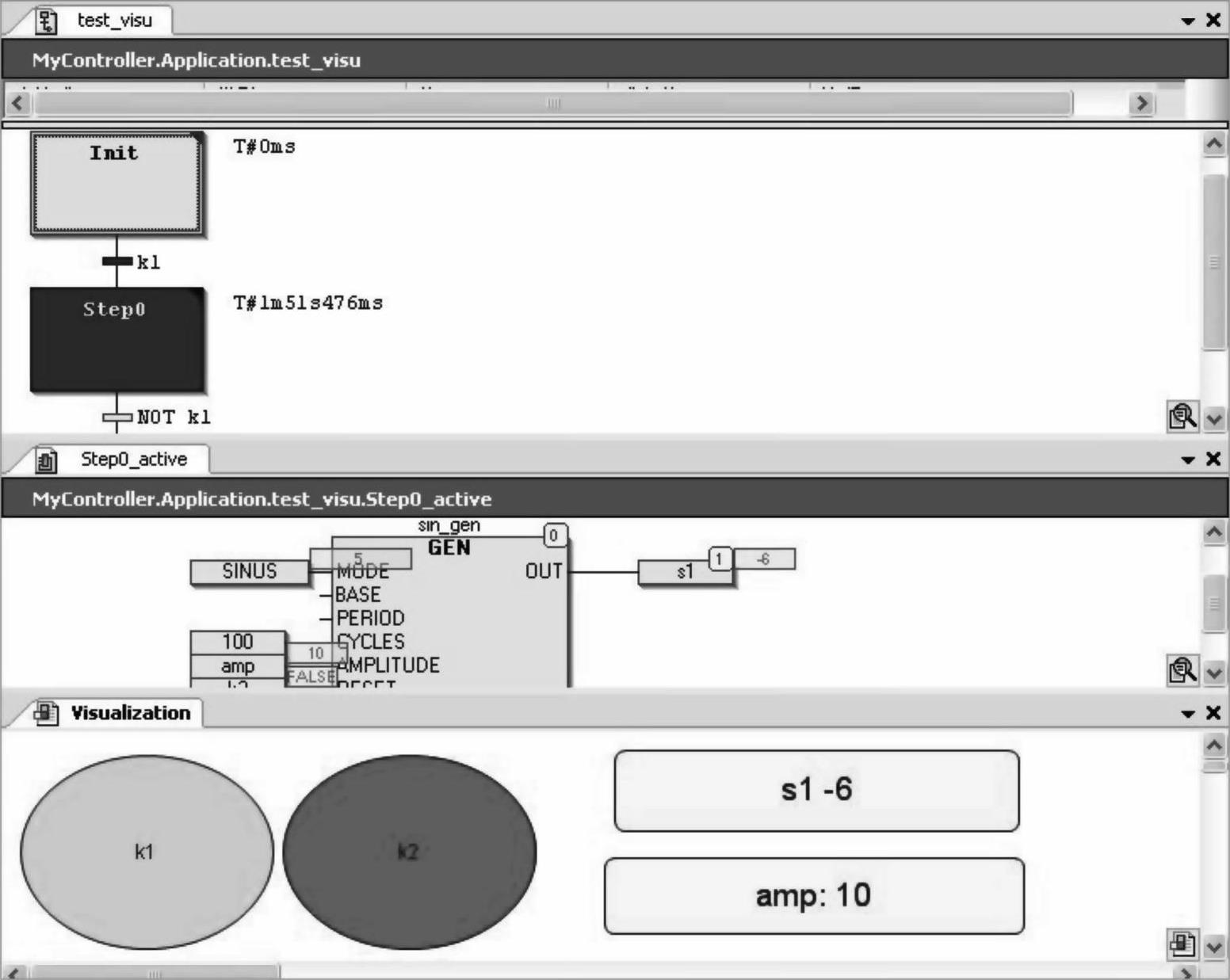
图9-31 没修改曲线幅值的仿真
修改幅值时,点击amp输入界面中,则在这个视图中弹出一个数字输入面板,如图9-32所示。
利用这个输入面板,我们可以输入要修改的数值。比如,把幅值修改为100。则在面板中输入100,并点击“OK”即可。需要注意的是:有时这个面板显示的位置在整个视图的右下方,当视图的显示为100%,即1:1时,看不到这个数字板。这时需要点击右下角的显示比例,把显示改为75%或50%,这样就可以看到了。
曲线幅值修改完后的仿真如图9-33所示。
我们也可以采用其他输入方式,例如采用执行ST代码方式,如图9-34所示。
采用执行ST代码方式,类似于编写一段程序,把数值或命令码赋值给变量。首先选定执行ST代码,然后点 ,把它导入右侧,点击右侧执行ST代码后,会出现执行ST代码的编程区,在这个编程区按照结构文本(ST)的编程语言编写程序即可。
,把它导入右侧,点击右侧执行ST代码后,会出现执行ST代码的编程区,在这个编程区按照结构文本(ST)的编程语言编写程序即可。
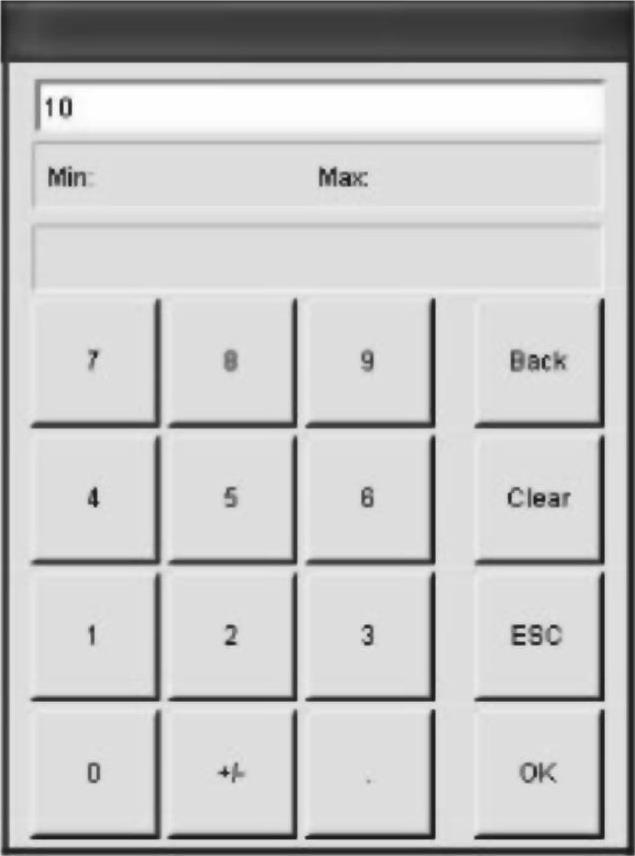
图9-32 数字输入面板
完成新的输入配置后,进行的仿真如图9-35所示。这时的幅值amp为10。
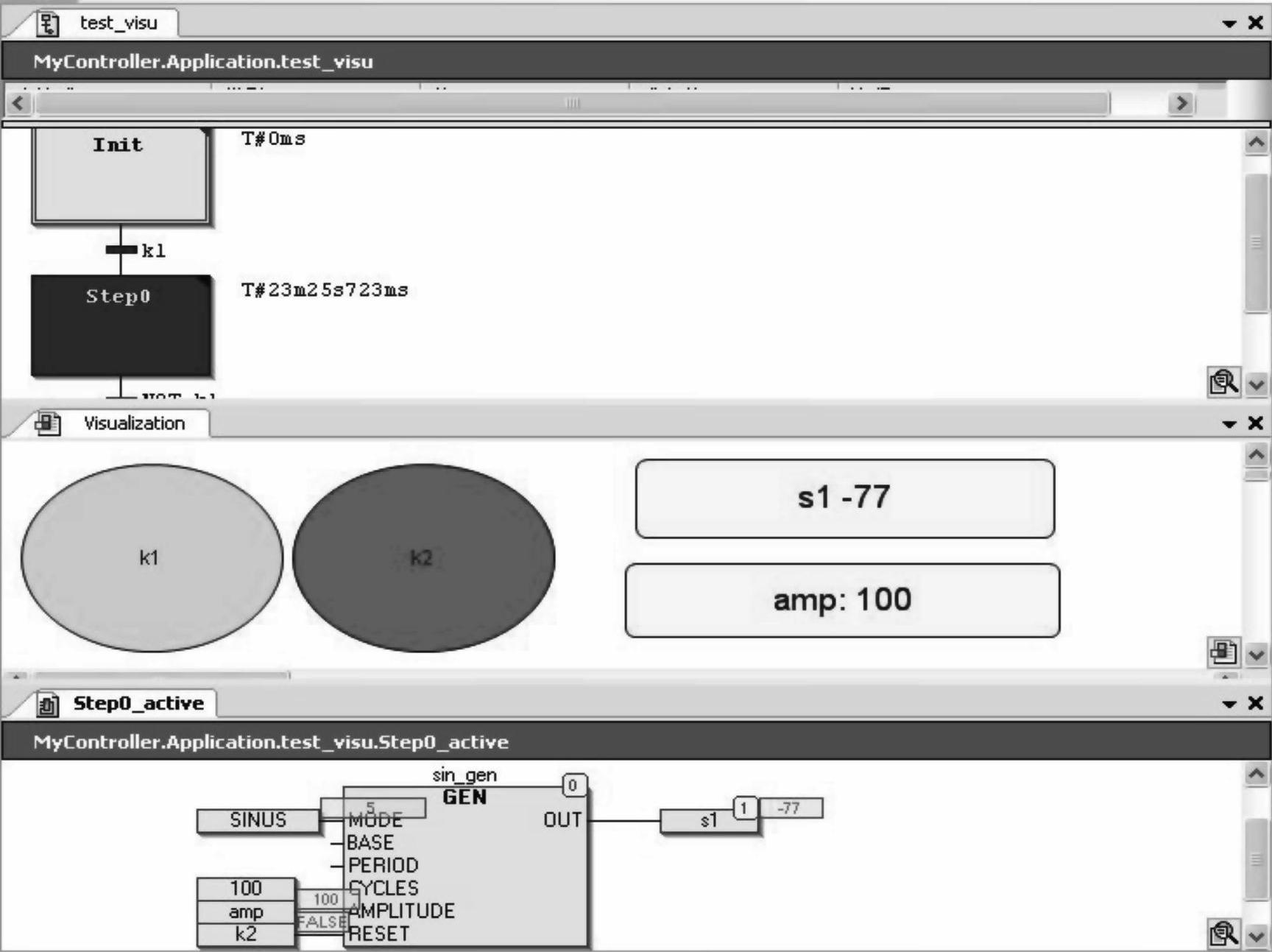
图9-33 修改后的视图仿真
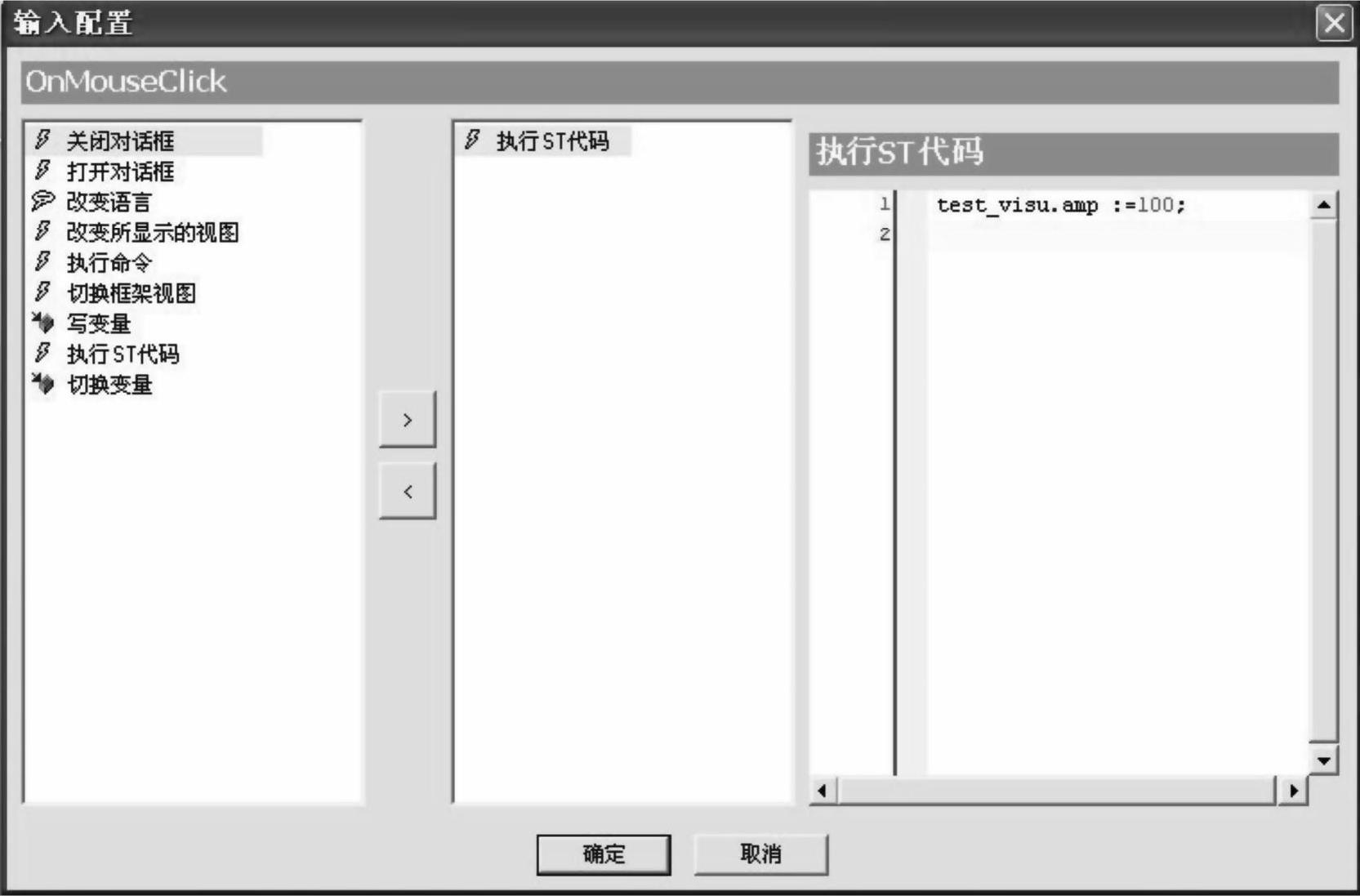
图9-34 采用执行ST代码方式
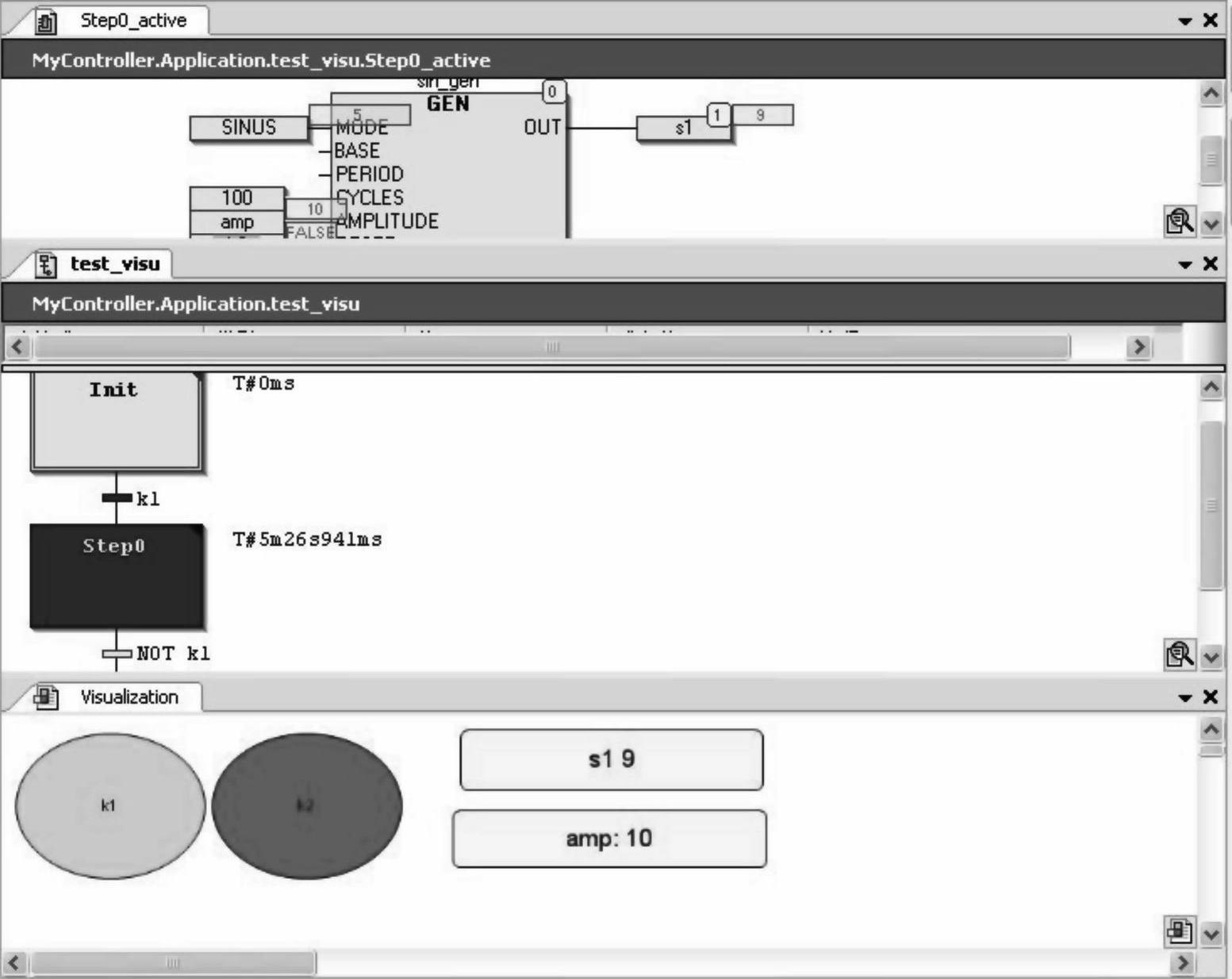
图9-35 修改后的仿真运行
在运行中,用鼠标点击一下输入框,这时幅值就变为100了,如图9-36所示。
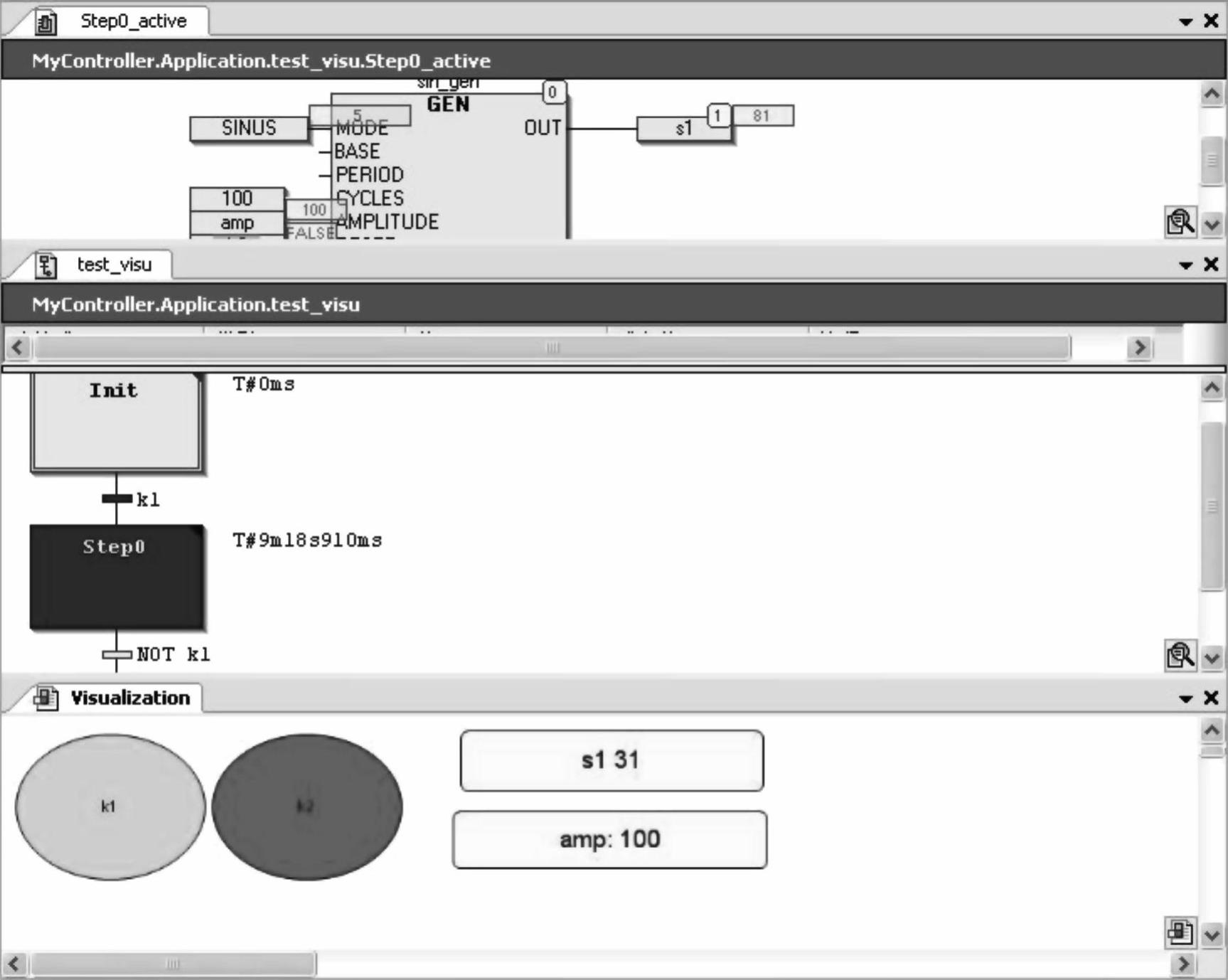
图9-36 点击输入框amp变为100
采用这种方法,你可以把一个个数值的输入变为一个个按钮,点击不同按钮,就赋不同的值,不用大量编程就能看到核心层的程序运行,从而为这个程序的稳定运行找到合适的方案。
3.编辑一组运动控制界面
在SoMachine编程软件中,集成了众多的运动控制功能,为了快速使电动机动起来,完成各种运动控制功能,在视图界面中也定义好了符合PLCopen的视图界面。例如,图9-37所示,我们要使一个电动机轴d1使能,并做寻原点和定长运动。
在这里,我们不急于编写大量程序,只需把相应功能块放进程序编辑区,指定运动轴。然后我们将使用视图来操作这些功能块及在视图上填写某些参数。首先,我们建立一个视图,把鼠标箭头移到“Application”后,点击右键,打开菜单,选择添加对象,然后寻到视图,如图9-38所示。
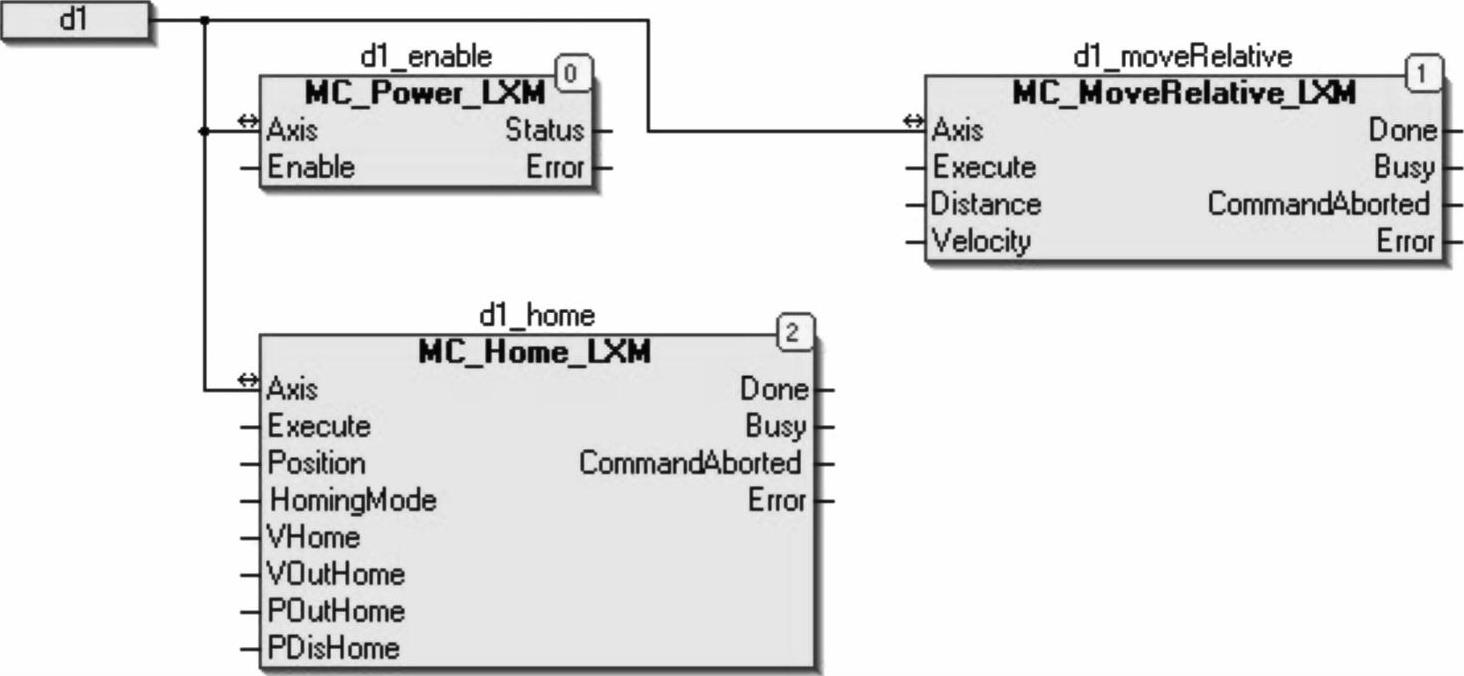
图9-37 运动控制界面
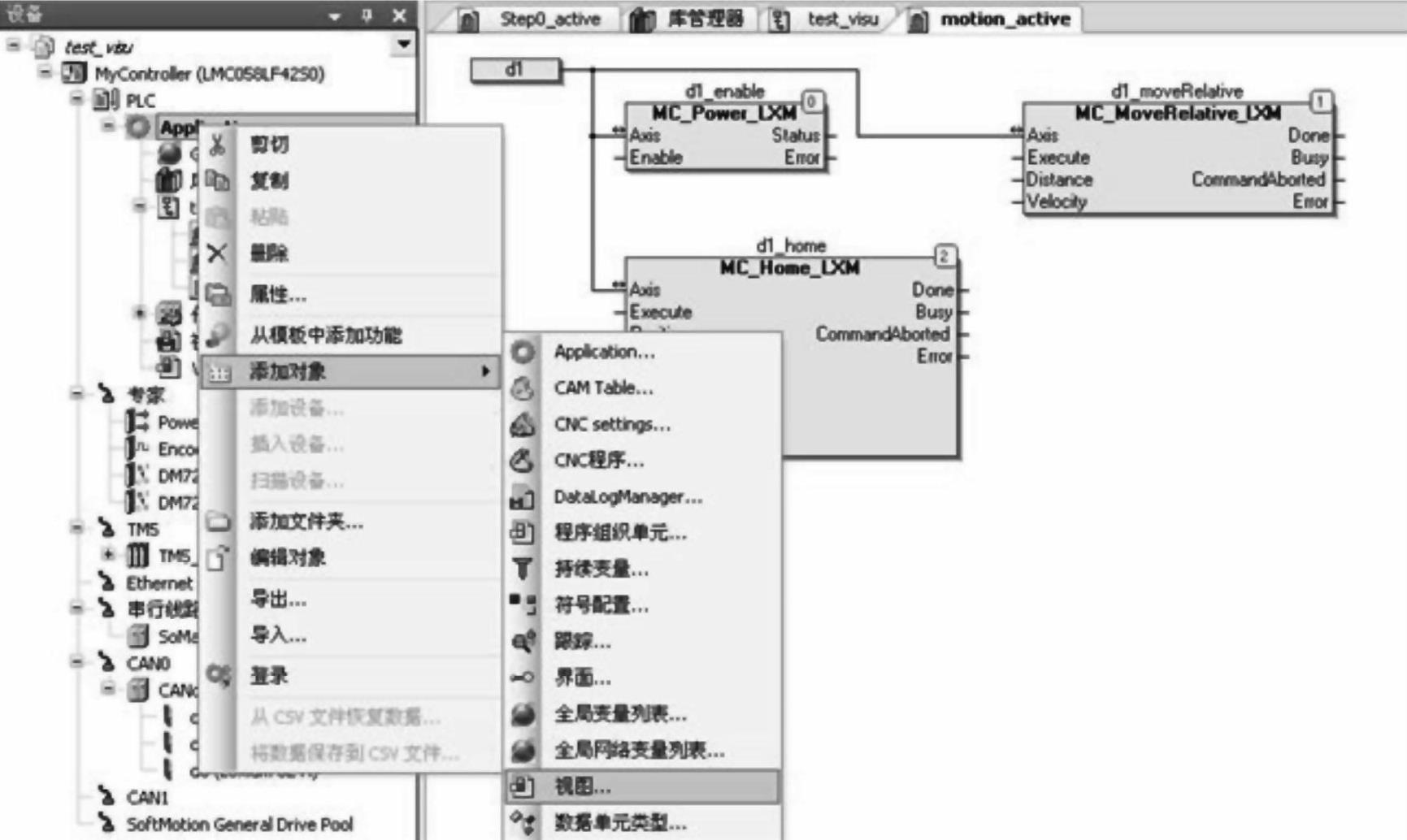
图9-38 添加视图
点击视图,出现如下命名框,对添加的视图命名,例如motion,点击“打开”,如图9-39所示。

图9-39 命名视图
这样就建立了一个名字为motion的视图。在motion视图中,打开工具箱,如图9-40所示。
图9-40 在视图中打开工具箱
点选工具箱的 模板,在视图编辑区划出一个边框,如图9-41所示。
模板,在视图编辑区划出一个边框,如图9-41所示。
图9-41 在视图编辑区划出边框
然后,在边框内点击鼠标右键,出现如图9-42所示菜单。

图9-42 在下拉菜单中选择“框架选择”
在这个菜单中,选择“框架选择”。这样就出现了框架配置框,如图9-43所示,在框架配置的左边列出了很多视图模板。
在这个框架配置框中,移动上下的滑条,找出电动机轴使能的视图模板并调出,如图9-44所示。
按“确定”键,把所选视图调入编辑框内,如图9-45所示。
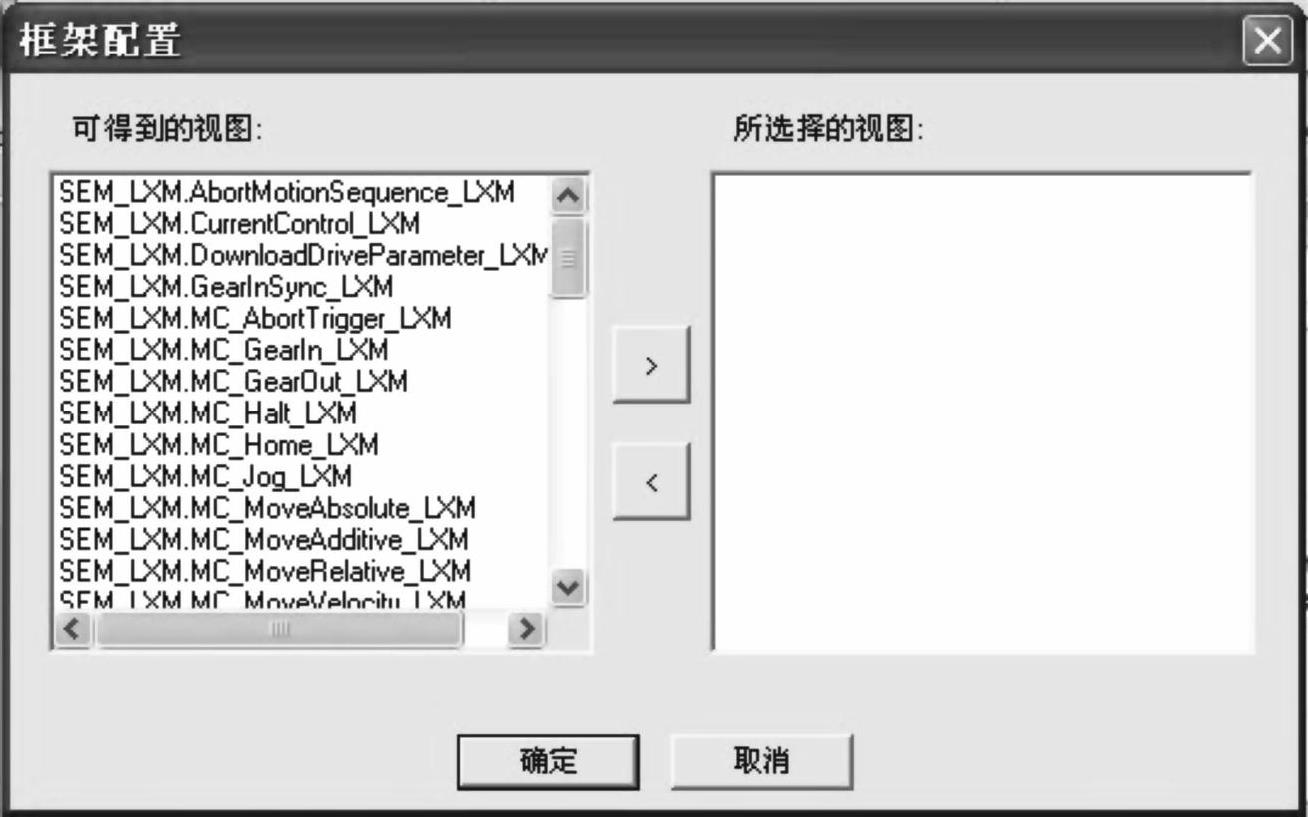
图9-43 框架配置
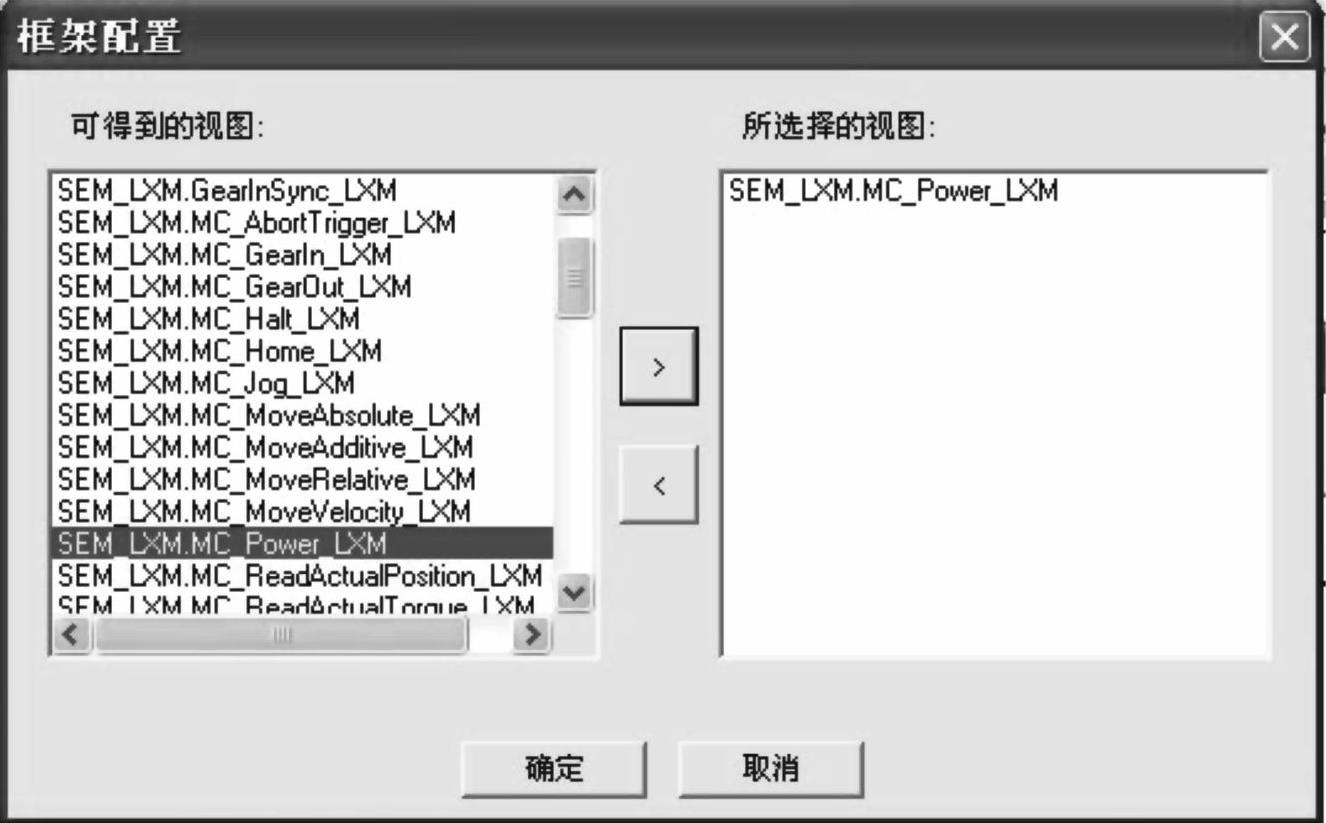
图9-44 在框架配置框中选出相应功能(www.daowen.com)
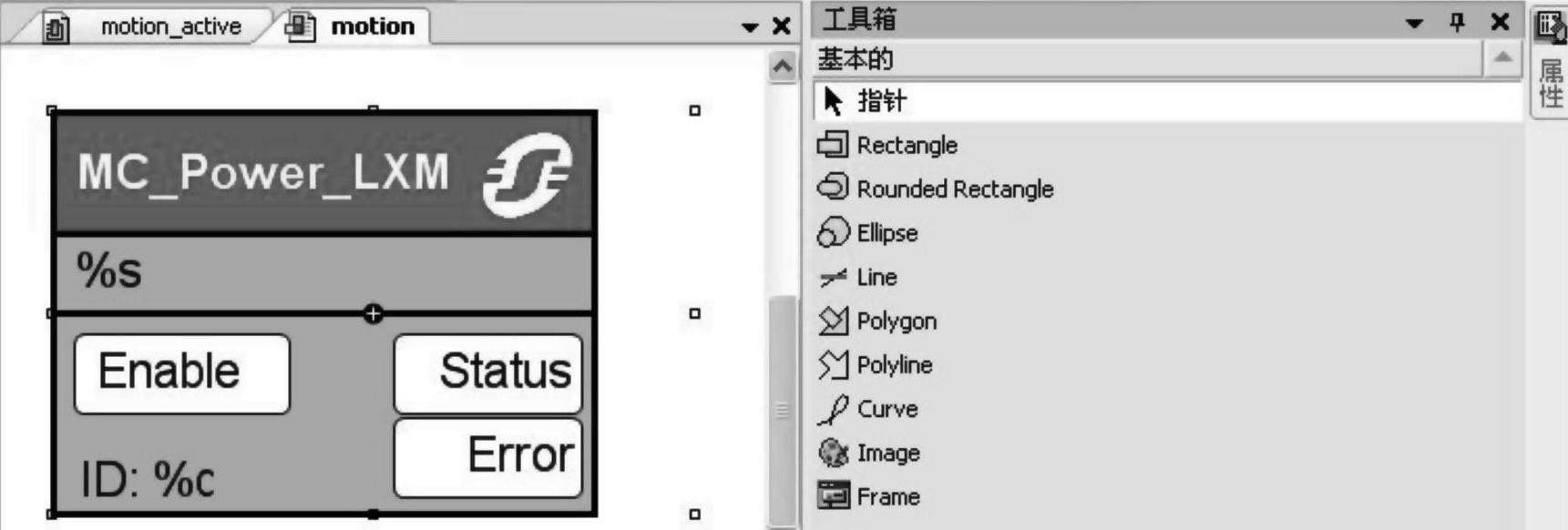
图9-45 调入使能模板
点击右侧的“属性”,打开属性框,如图9-46所示。
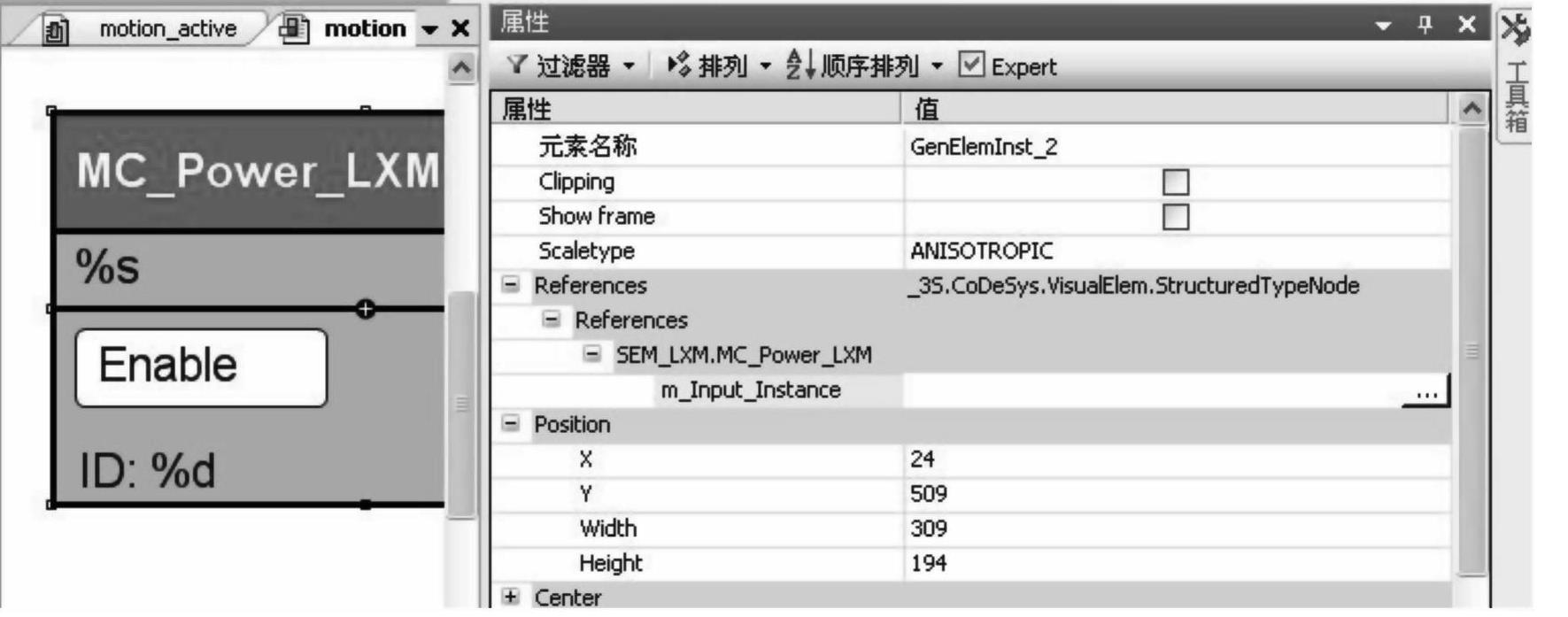
图9-46 打开模板属性框
在属性框里,找到参考输入,点击右侧的白框 ,弹出输入助手,如图9-47所示。
,弹出输入助手,如图9-47所示。
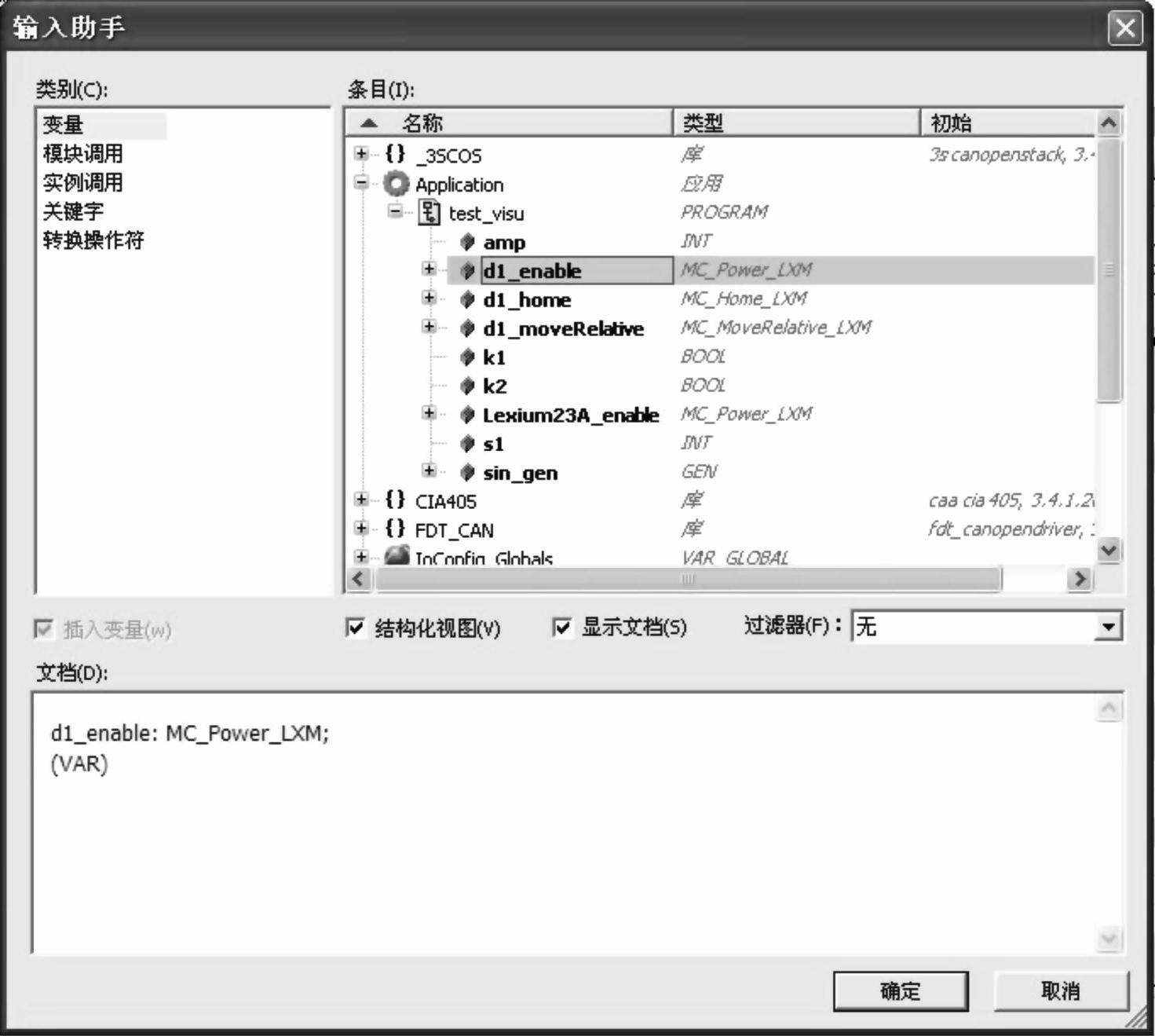
图9-47 打开输入助手
在输入助手框,找到在程序编辑区已放置的功能块d1 enable,点击“确定”,完成对模板属性的组态。这样就使视图和功能块连接起来,在视图中就可以对此功能块进行操作。
完成模板组态后的属性,如图9-48所示。
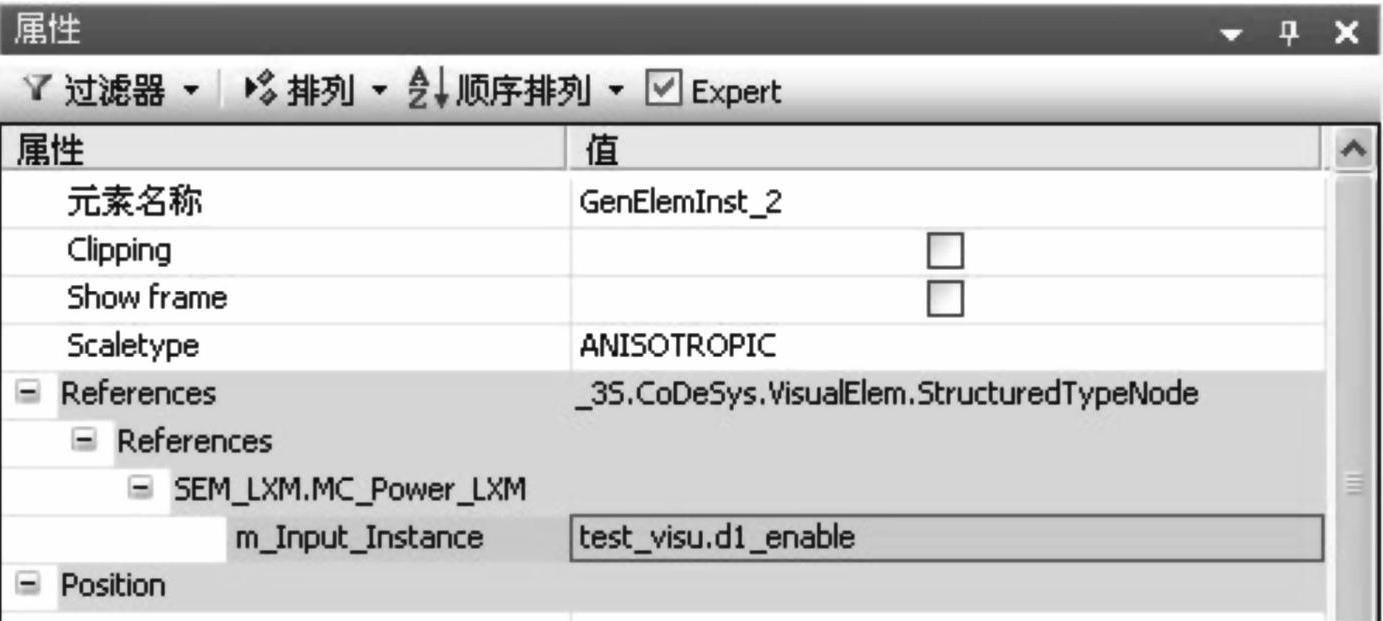
图9-48 完成模板组态后的属性
同样步骤,我们找出寻原点和定长的视图模板,如图9-49所示。
对调入的视图模板的属性进行组态。对寻原点模板属性的组态,如图9-50所示。
对定长运动模板属性的组态,如图9-51所示。
编辑完成后,我们就可以通过视图对电动机轴进行使能、寻原点和走定长的操作了。由于在现场总线上所组态的轴是实轴,因此,这种结构的控制是不能做仿真实验的。如果要做电动机轴运动的仿真运行,就需要把运动轴设置为虚轴组。这在运动控制器LMC058上是可以做到的。因为运动控制器可以把运动轴设置为虚轴。如图9-52所示,把鼠标移到SoftMotion点右键,打开下拉菜单,选择添加设备。
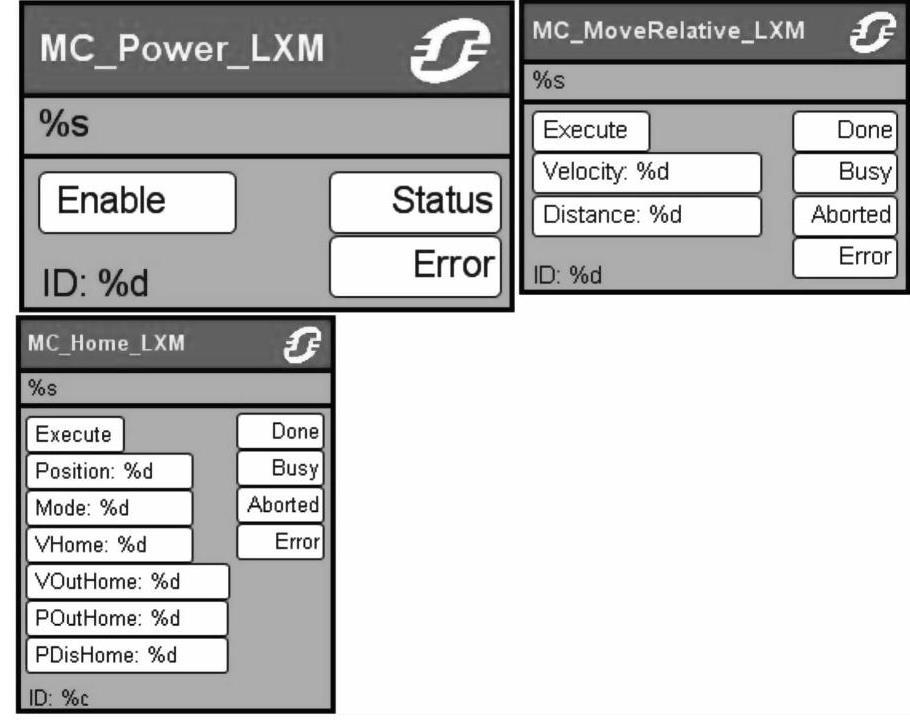
图9-49 调入相应视图模板
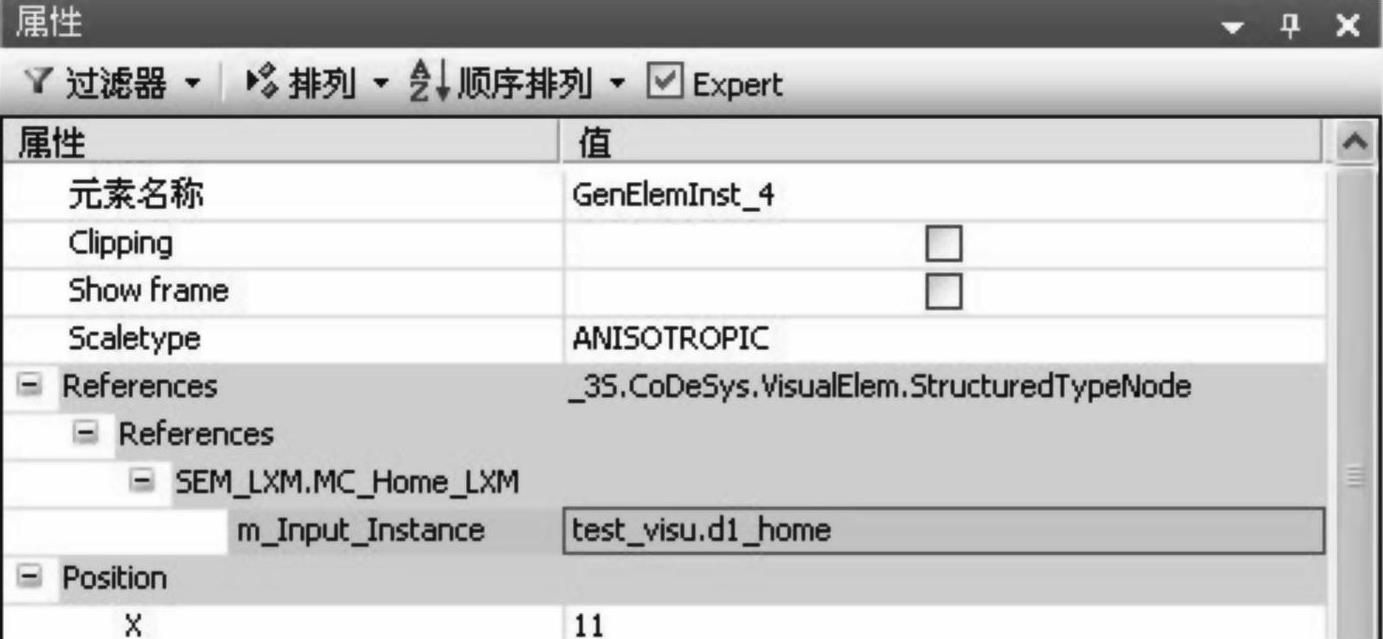
图9-50 寻原点模板属性的组态
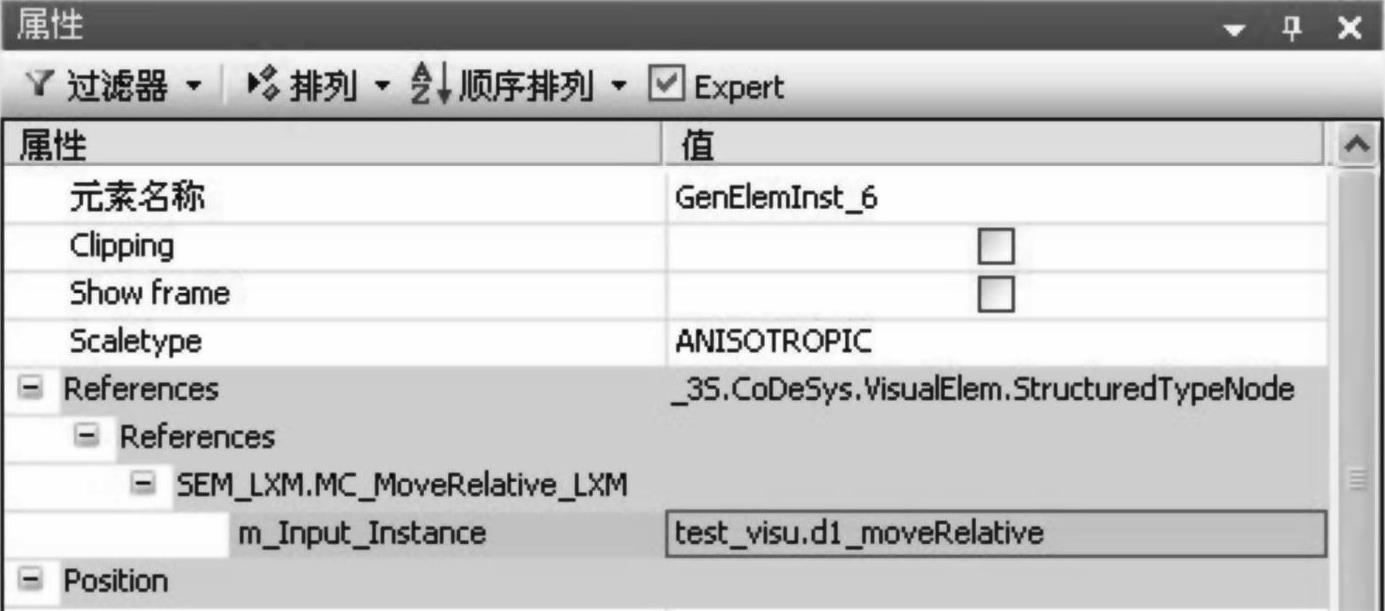
图9-51 定长运动模板属性的组态
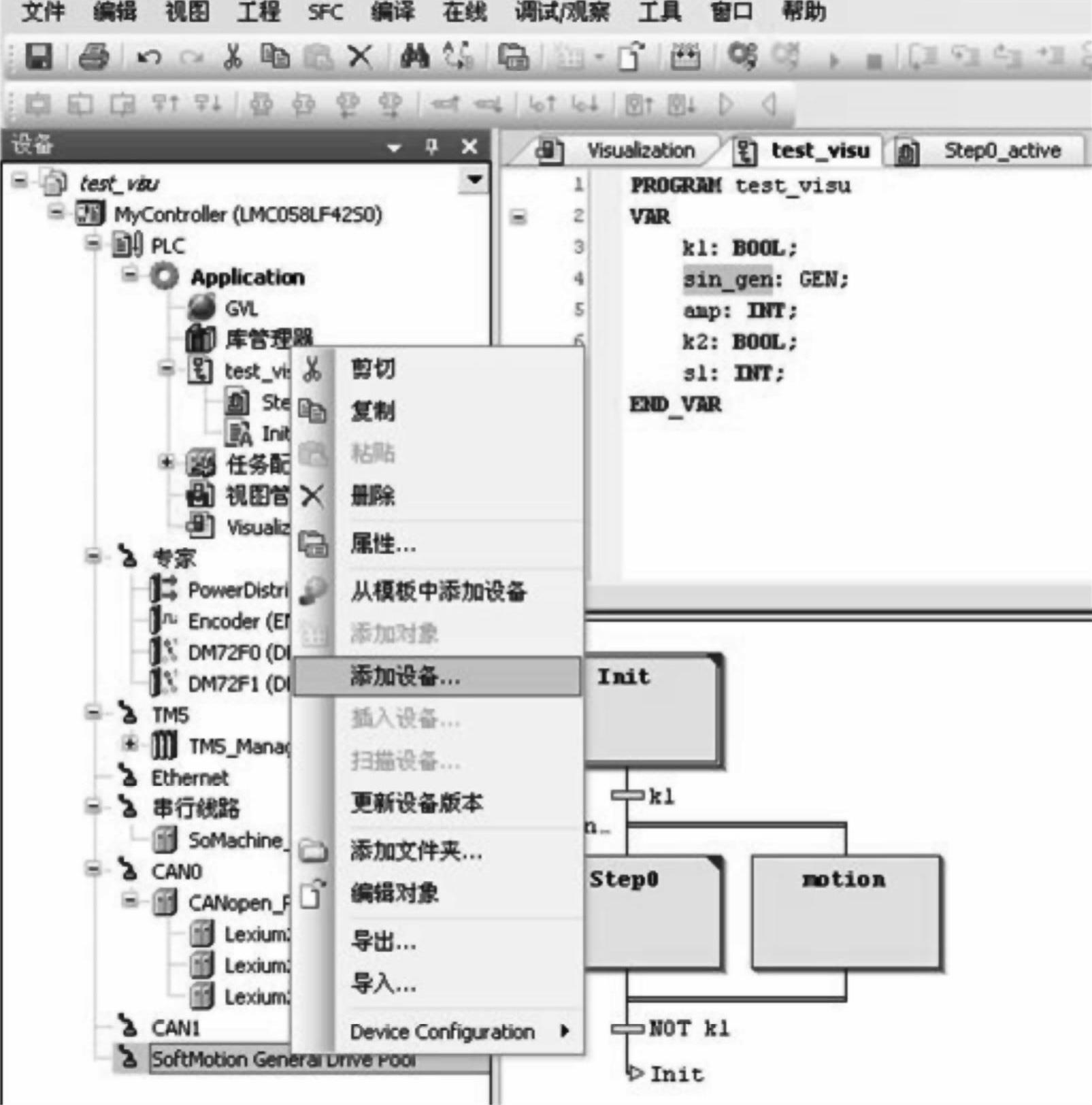
图9-52 添加设备
在弹出的添加设备框中,添加虚拟驱动轴,如图9-53所示。
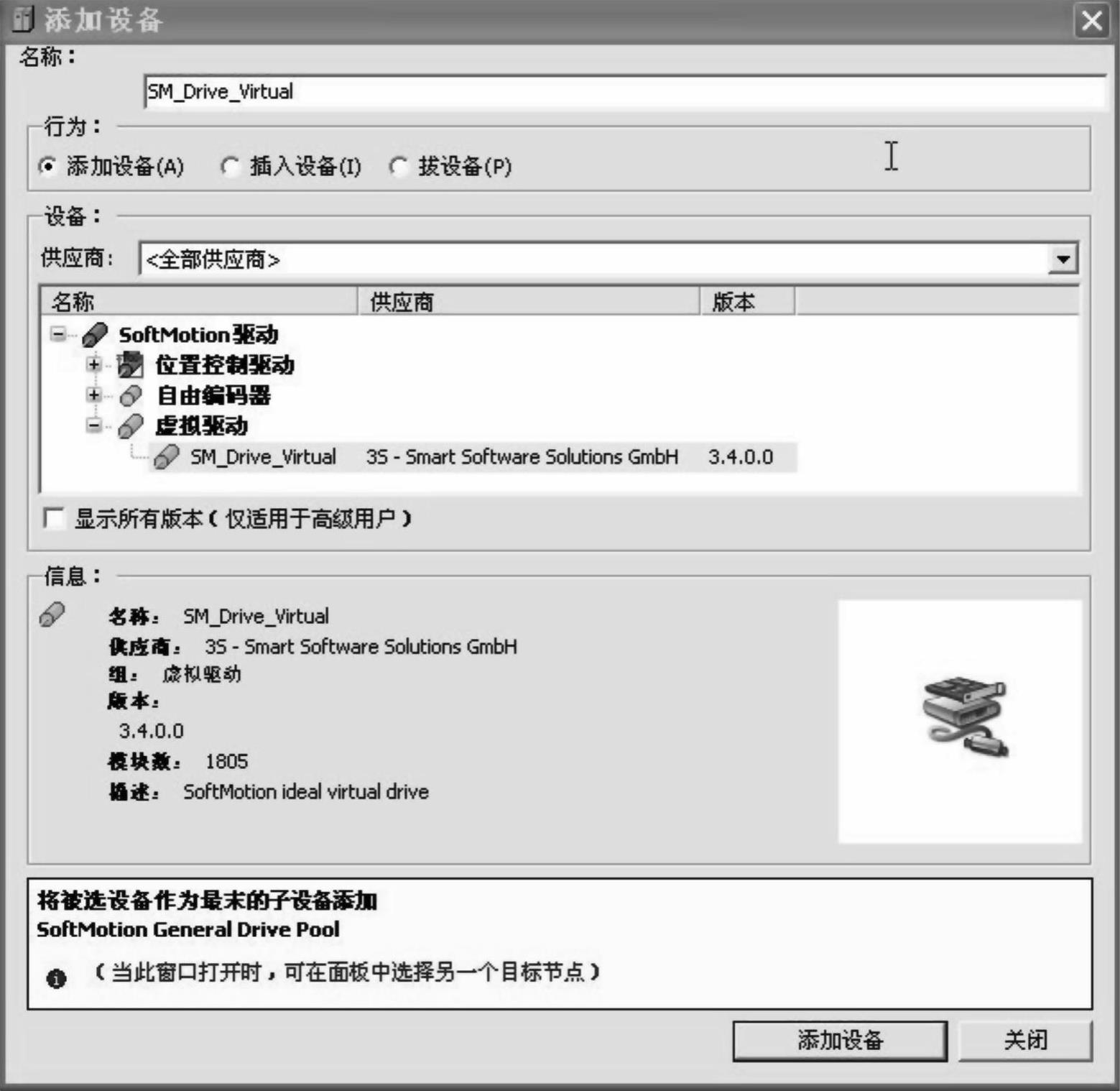
图9-53 添加虚拟驱动轴
点击选中虚拟驱动下的虚轴后,点“添加设备”,即添加了一个虚轴SM_Drive_Virtu-al。如果觉得这个名字过于繁琐,我们可以重新命名这个虚轴。如图9-54所示,在默认名下打开菜单,选择“属性”。在属性栏目下,修改设备名。默认设备名如图9-55所示。
修改名字为d1,如图9-56所示。
按“确定”后,在设备栏,我们看到建立的虚轴d1,如图9-57所示。
这样我们就可以用功能块视图对虚轴d1进行操作。这样的好处是:我们可以在没有实轴的条件下,只通过运动控制器就可以仿真多个轴的运动,包括多个轴的同步运动,例如:电子凸轮、CNC等。如图9-58所示,我们双击motion框,建立一个CFC轴运动程序。
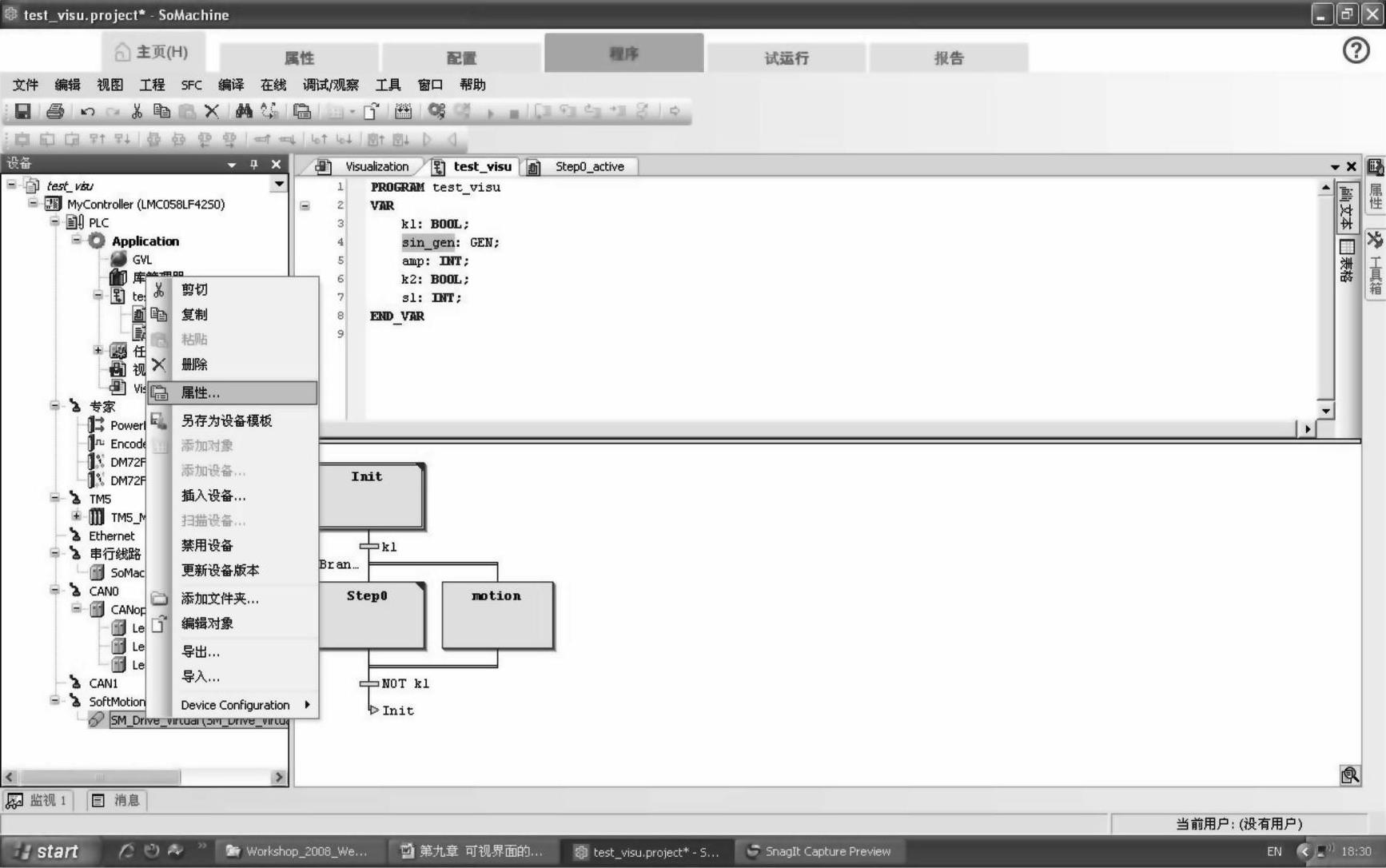
图9-54 在本条目下打开菜单
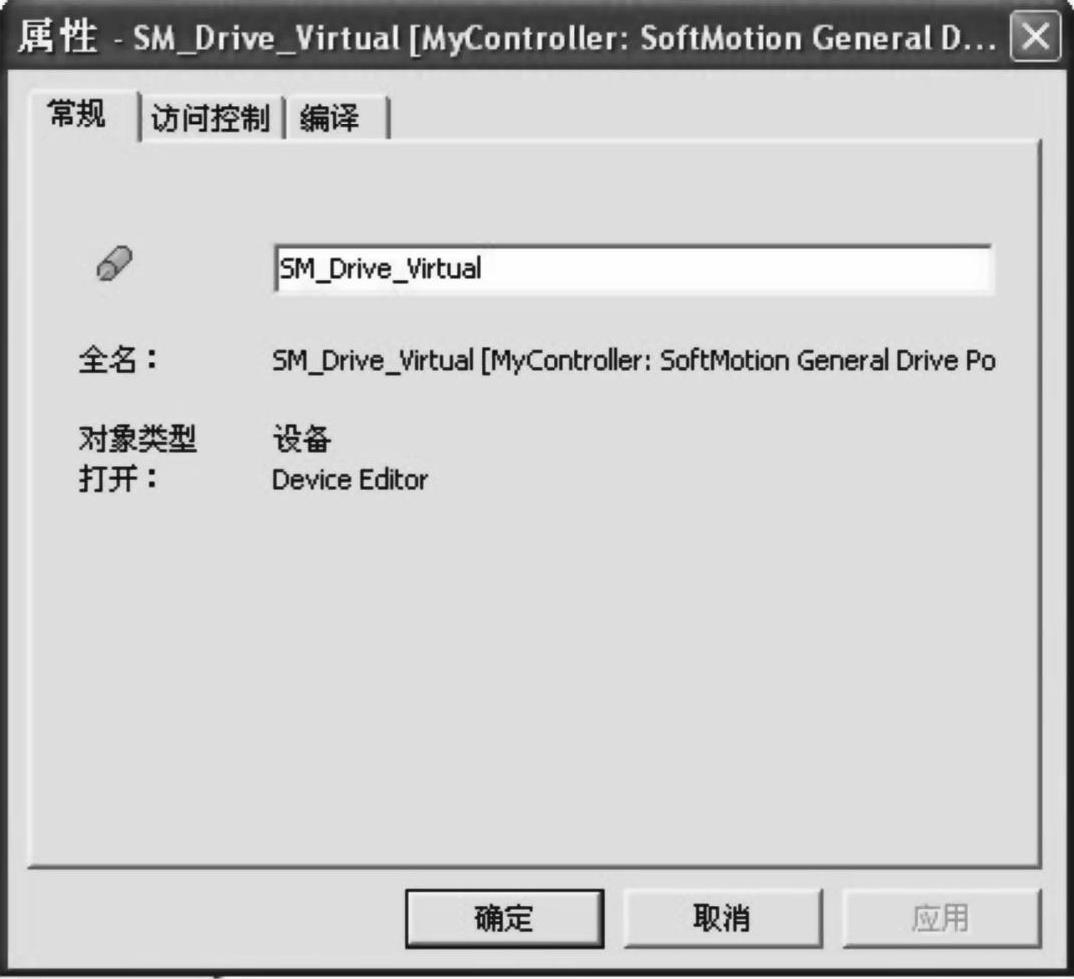
图9-55 默认设备名
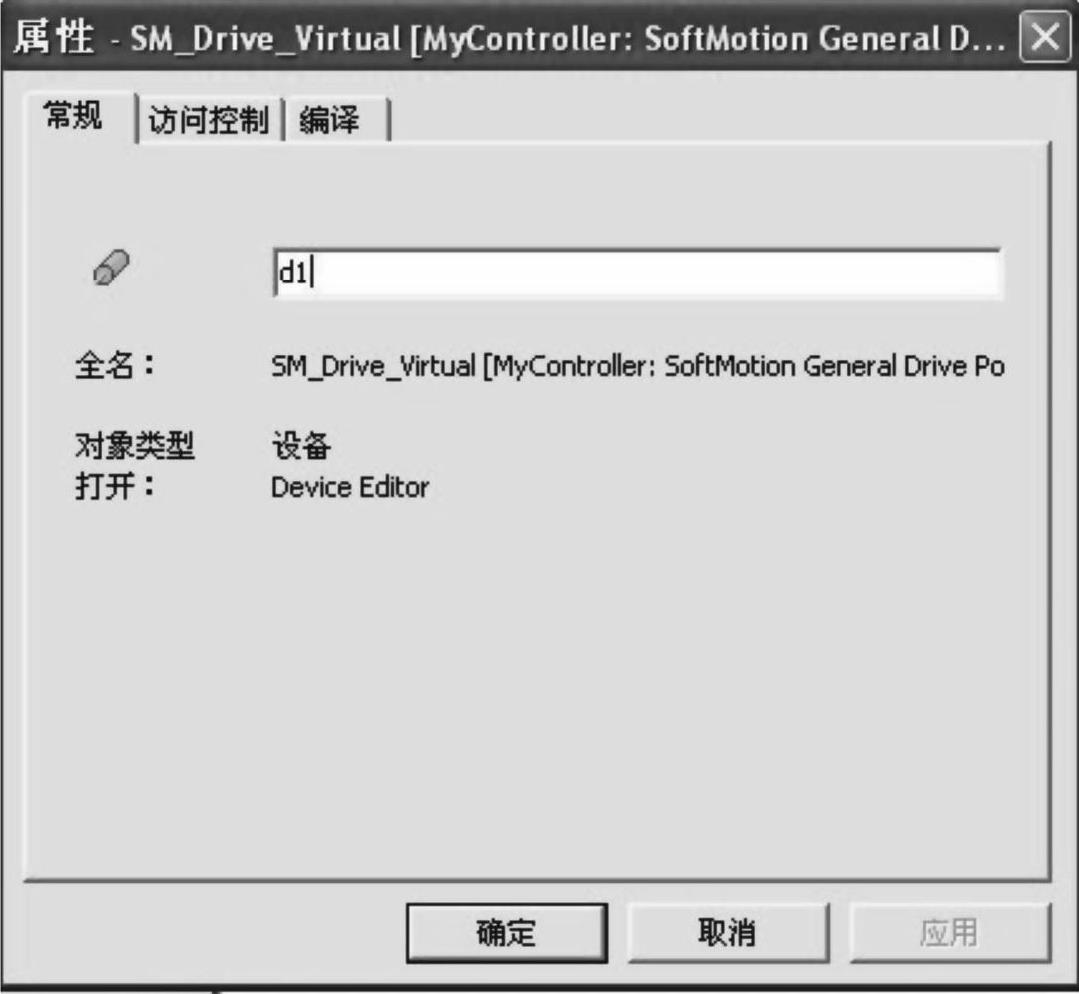
图9-56 修改设备名
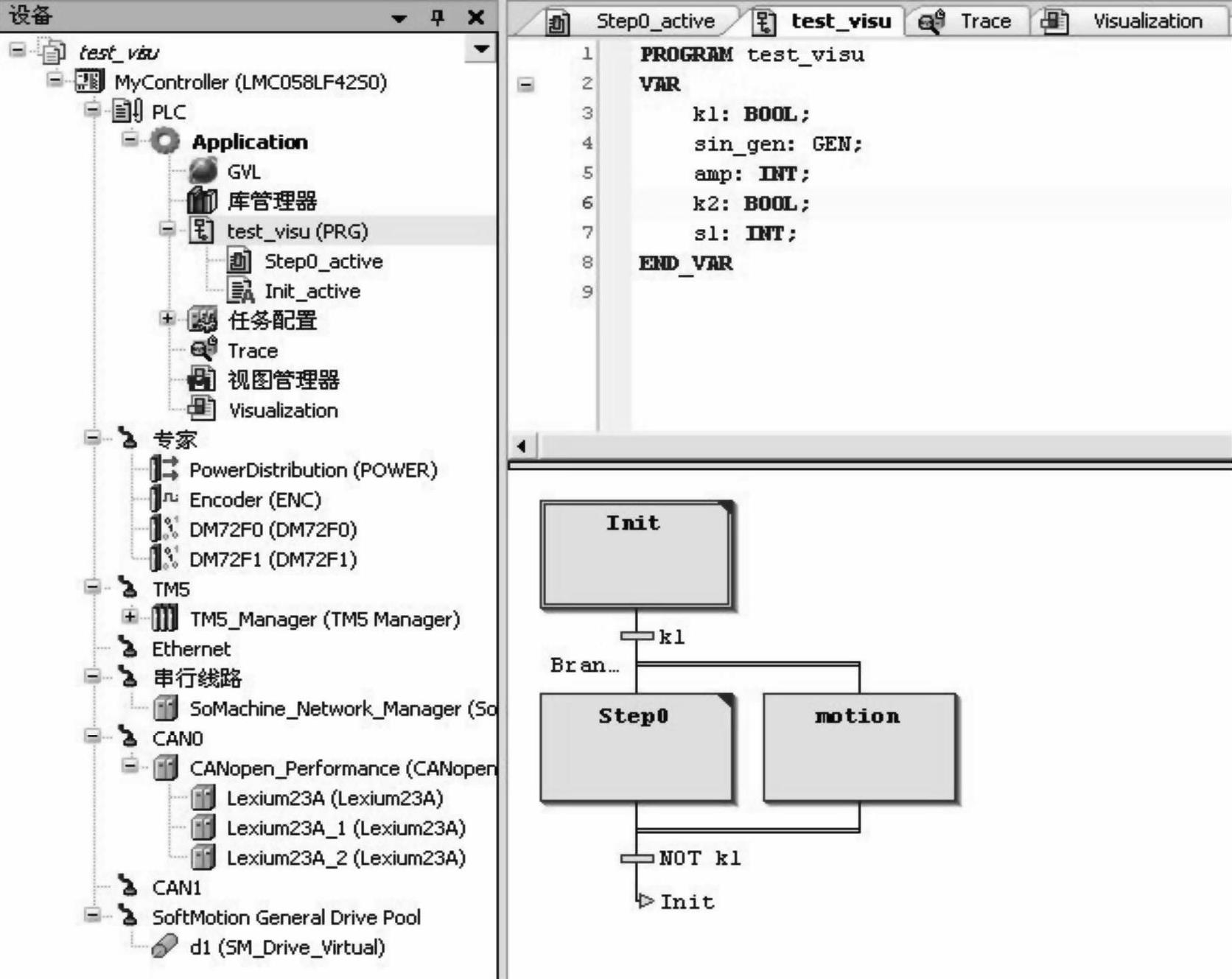
图9-57 虚轴设备名
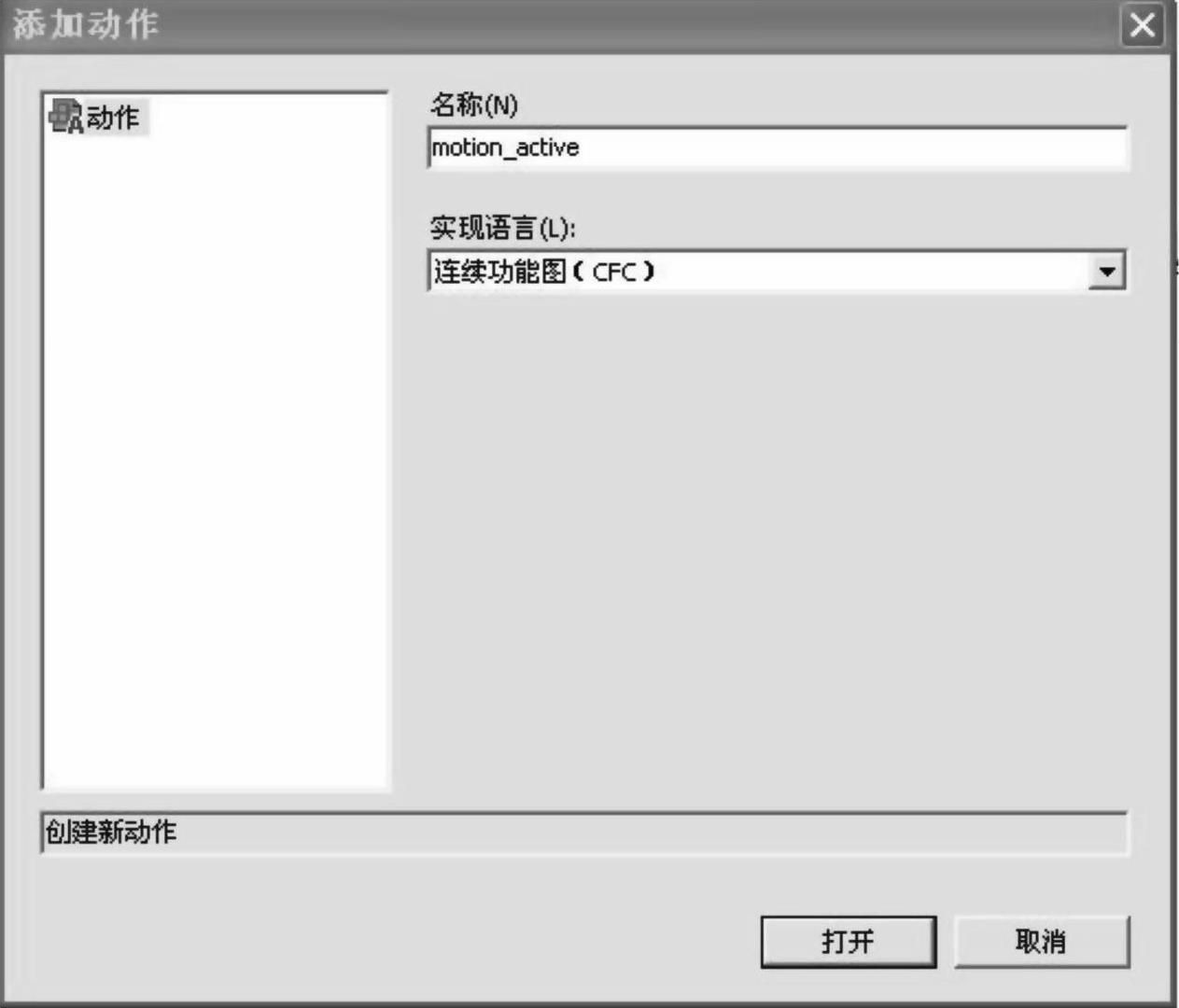
图9-58 建立一个轴运动程序
在程序编辑区,调入使能功能块、速度功能块、位置功能块,如图9-59所示。
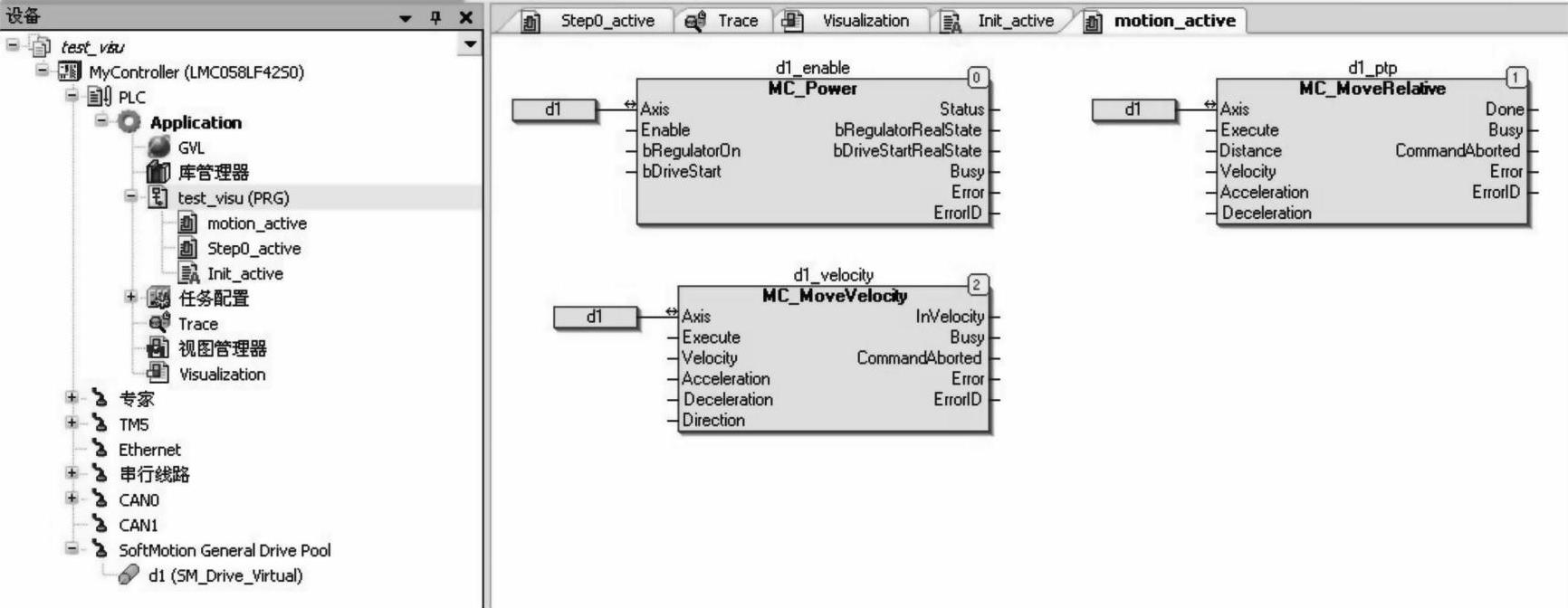
图9-59 编辑运动控制程序
根据这个程序,我们建立一个motion视图操作。如图9-60所示,把鼠标移到“Applica-tion”点右键,打开菜单,添加视图。
创建motion视图,如图9-61所示。
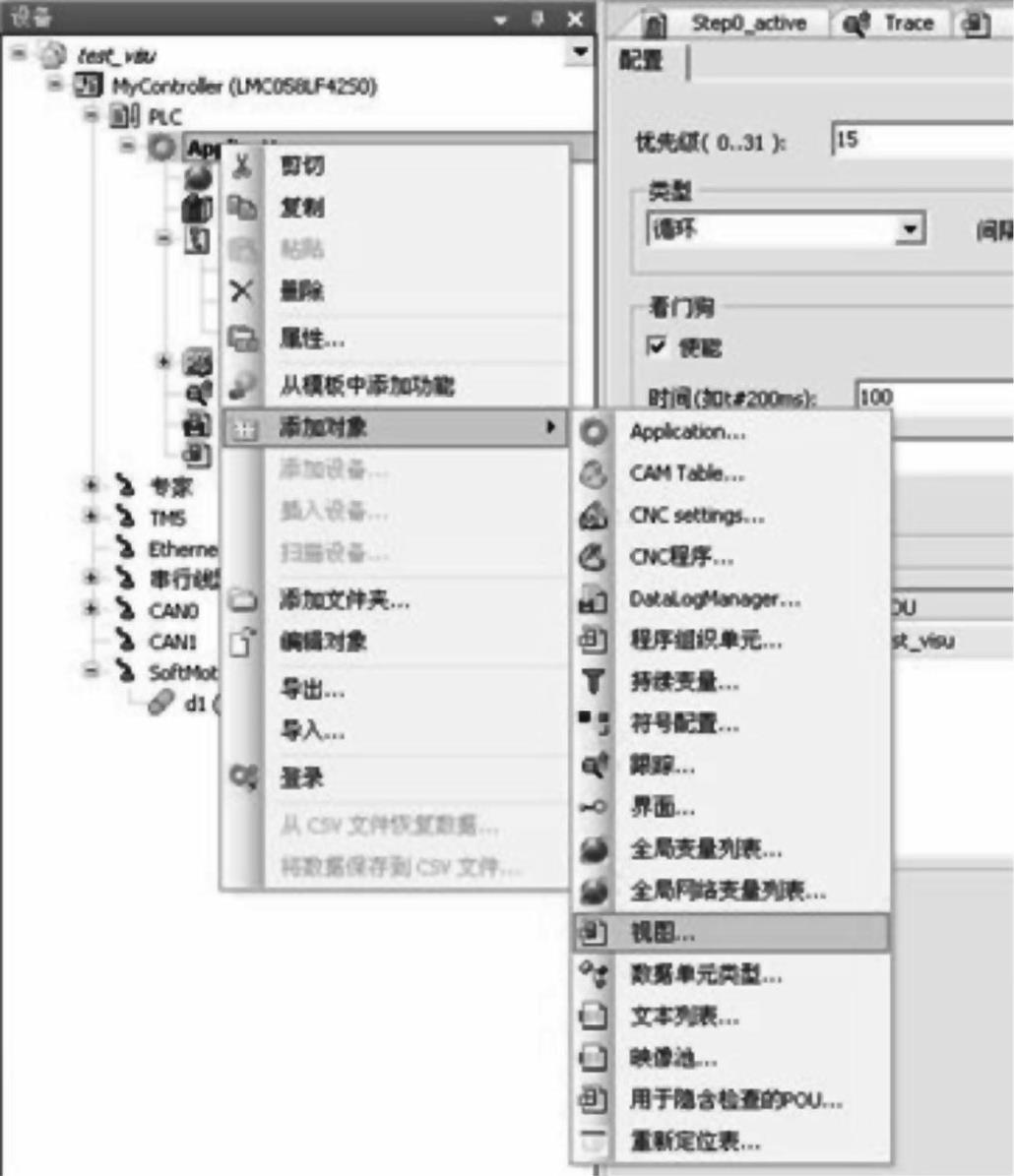
图9-60 添加视图
图9-61 创建motion视图
在视图界面,打开工具箱,点选框架 ,在编辑区划出一个框架范围,如图9-62所示。
,在编辑区划出一个框架范围,如图9-62所示。
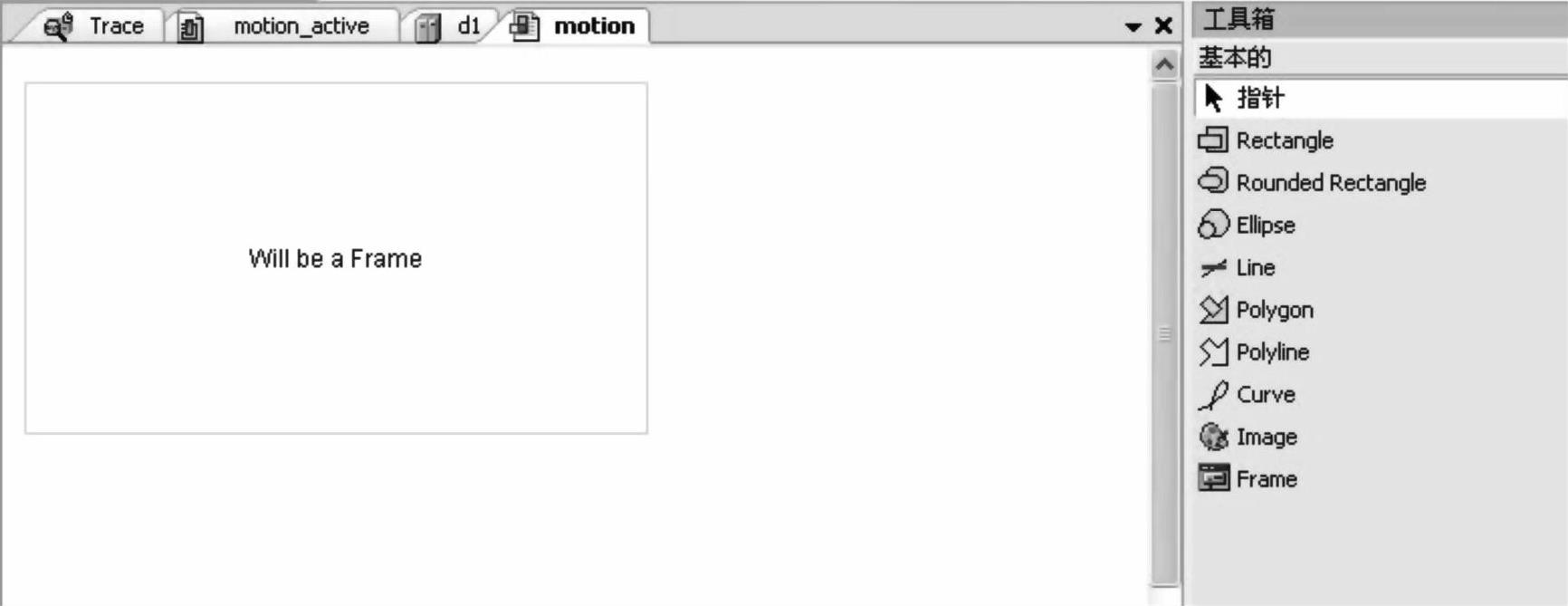
图9-62 编辑视图控制
在框架中,点右键打开菜单,选择“框架选择”。在弹出的框架配置中,选择使能模板,如图9-63所示。
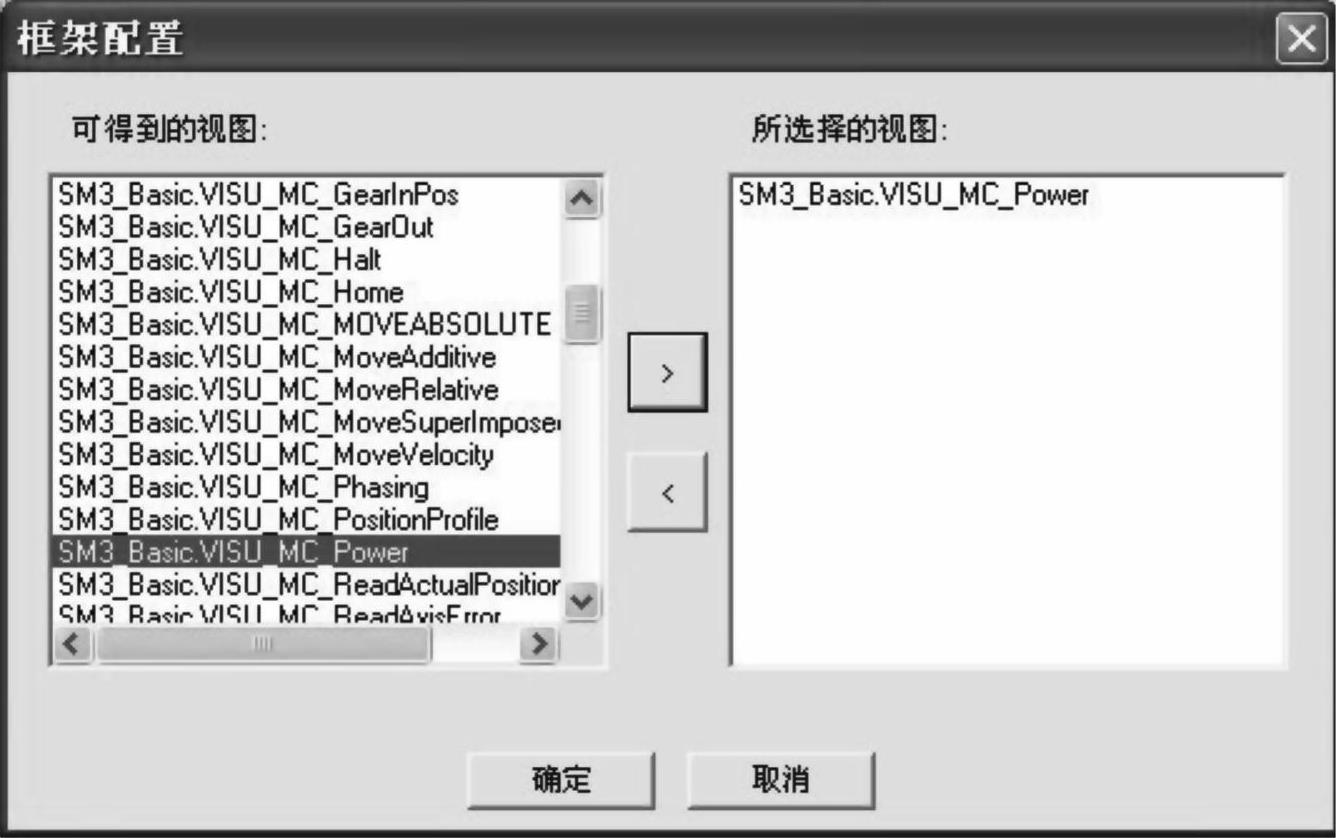
图9-63 在配置框中选择相应模板
确定后,模板被调入视图,如图9-64所示。
选中调入的模板后,打开属性框。在属性框中的参考References栏目下,点击右侧的输入助手,在输入助手框找到已经编辑好的使能功能框d1 enable,如图9-65所示。
同理,我们在视图编辑区调入速度模板、位置模板并编辑好对应属性,motion视图如图9-66所示。
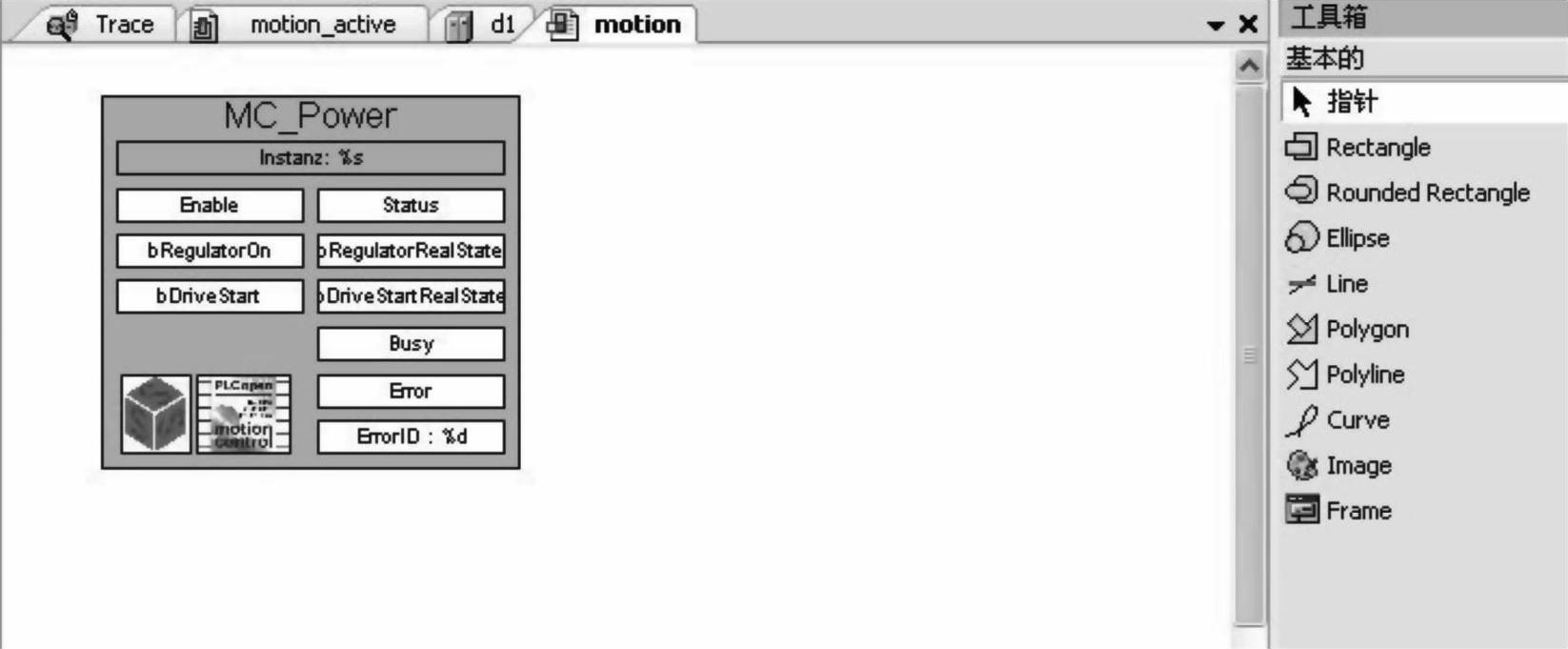
图9-64 调入使能模板
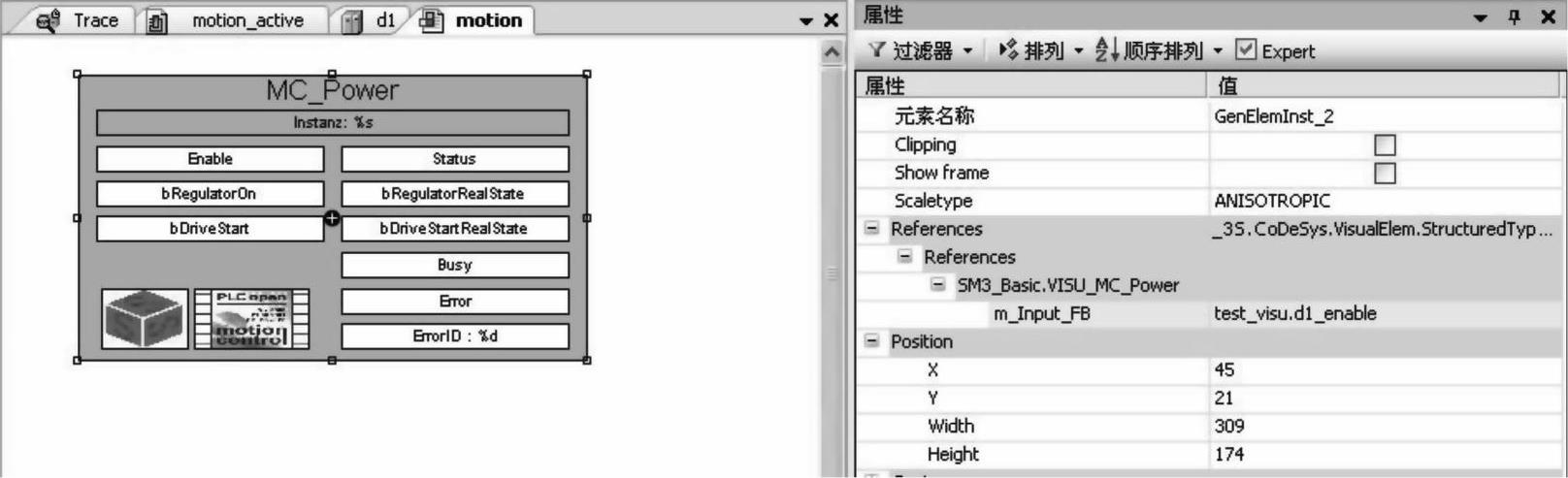
图9-65 模板属性编辑
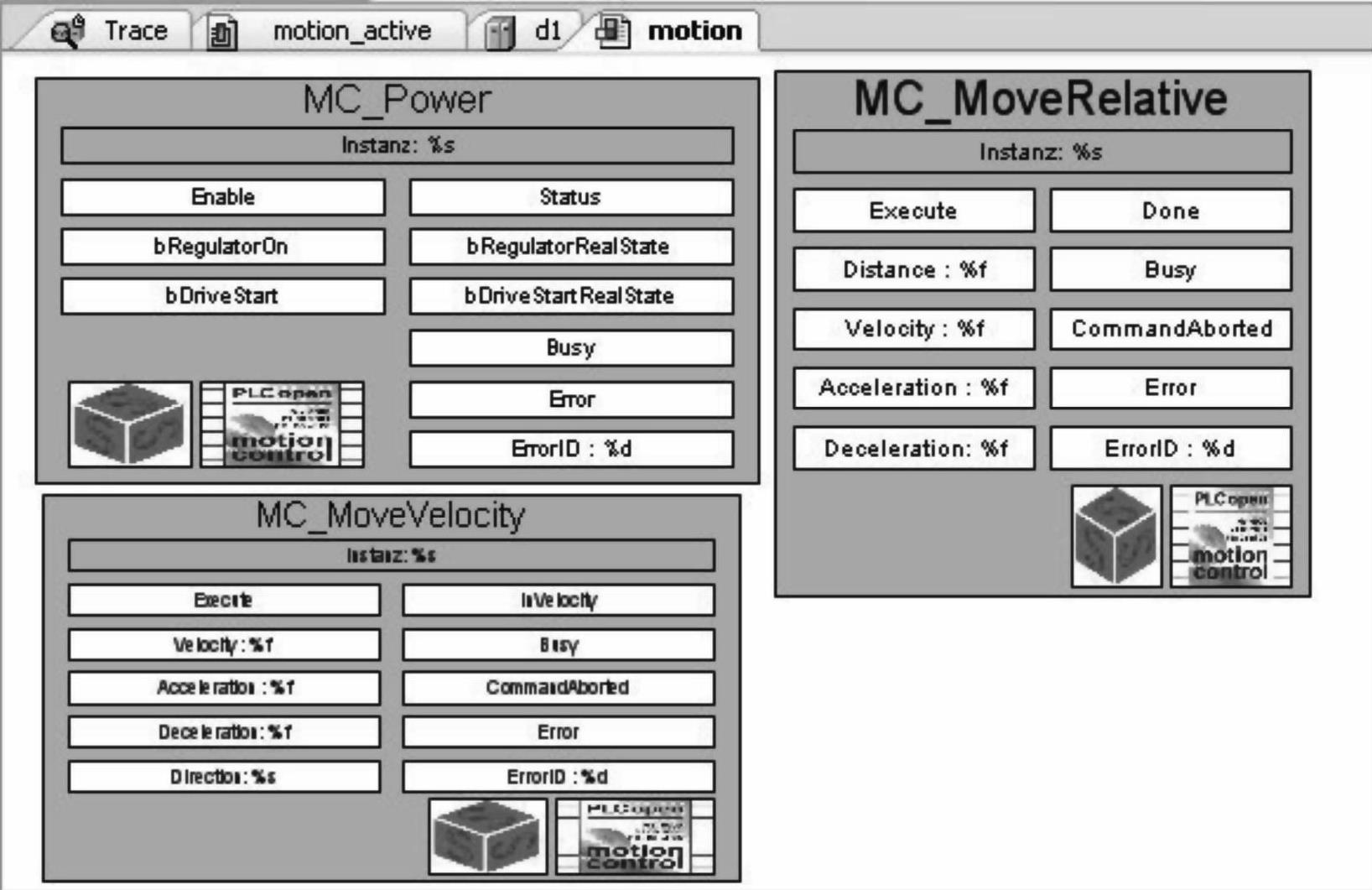
图9-66 motion视图
为了直观显示轴的运动,我们可以再调入一个轴运动的模板,即在打开的框架配置中,选择轴的圆周运动,如图9-67所示。
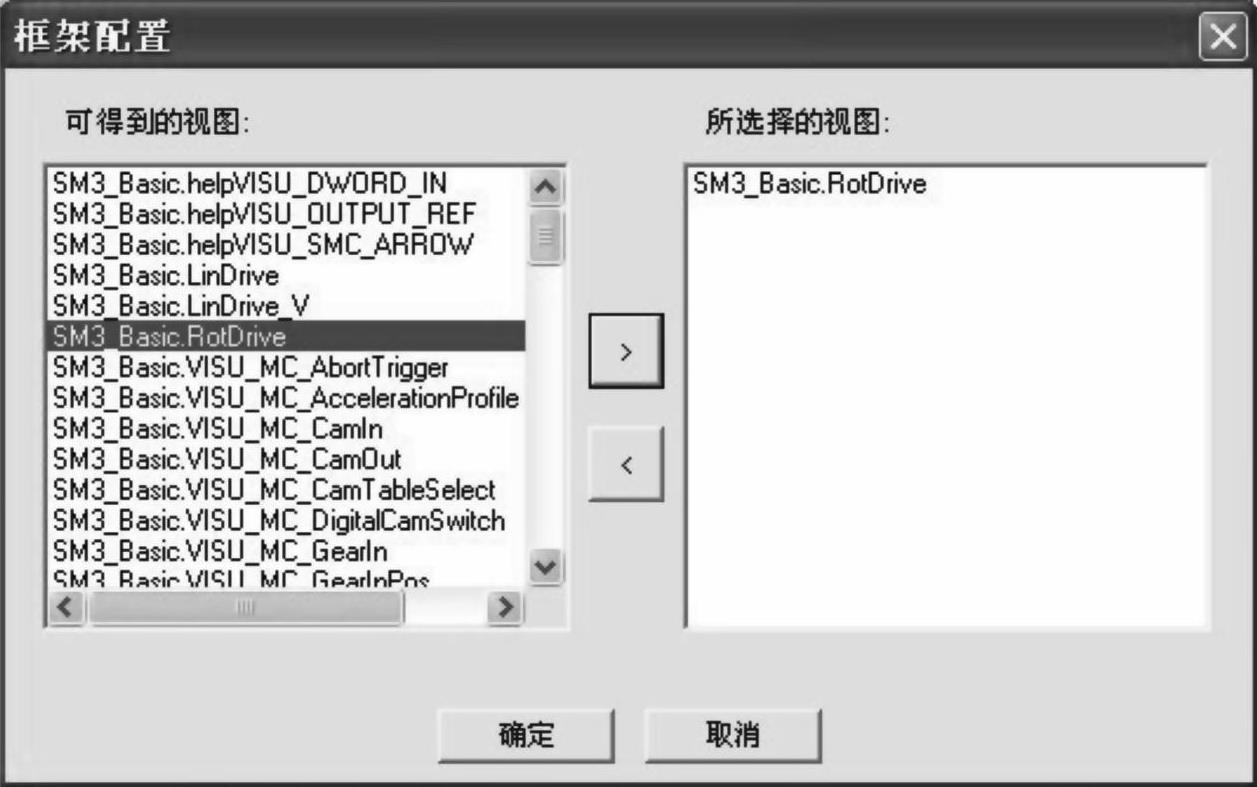
图9-67 选择轴的圆周运动
确定后,在视图编辑区会看到一个圆形指针,如图9-68所示。
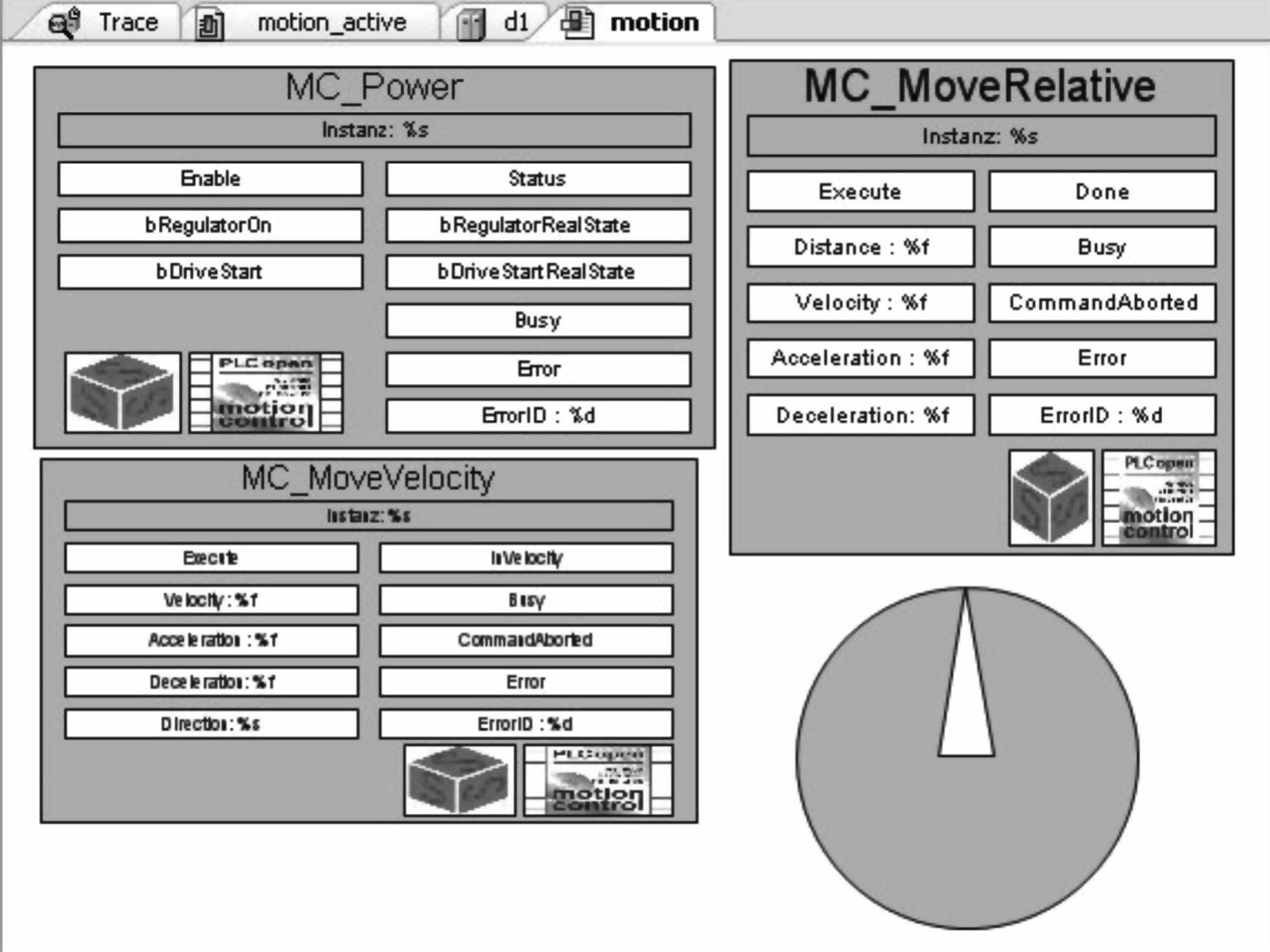
图9-68 轴动作指示
选中这个轴模板,打开“属性”,属性的参考值为轴的名字d1,如图9-69所示。
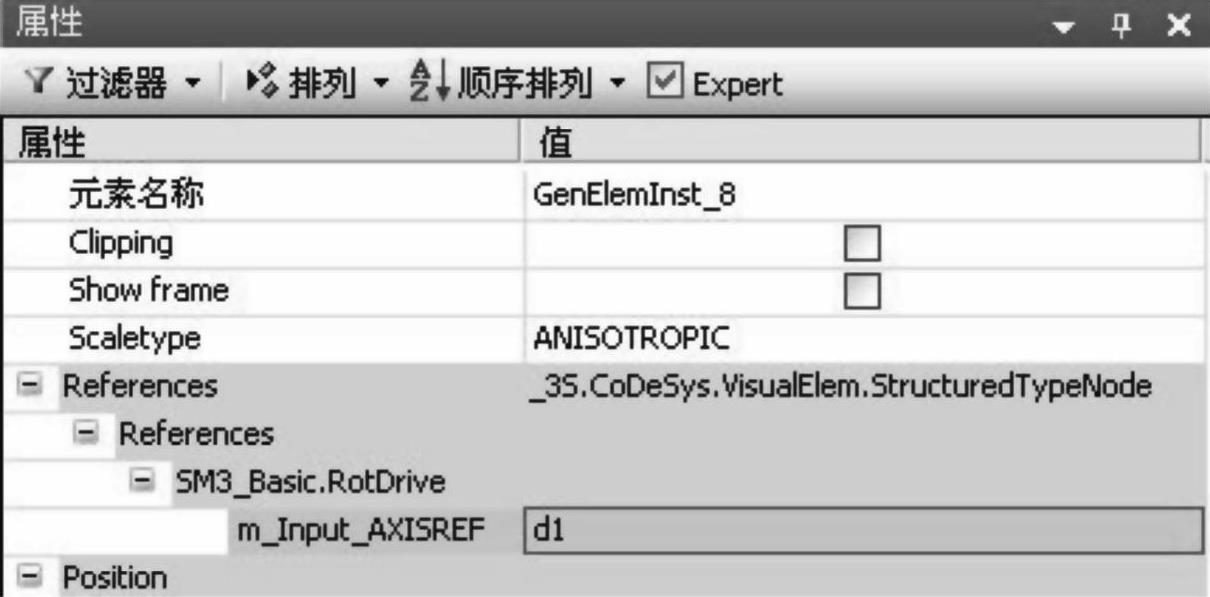
图9-69 轴的属性
视图做好后,我们就可以连接上LMC058进行轴运动的仿真了。如图9-70所示,在视图中我们可以使能轴并且操作速度运行。也可以操作轴做定位控制。如图9-71所示,一旦轴位置到达,则DONE信号变绿。
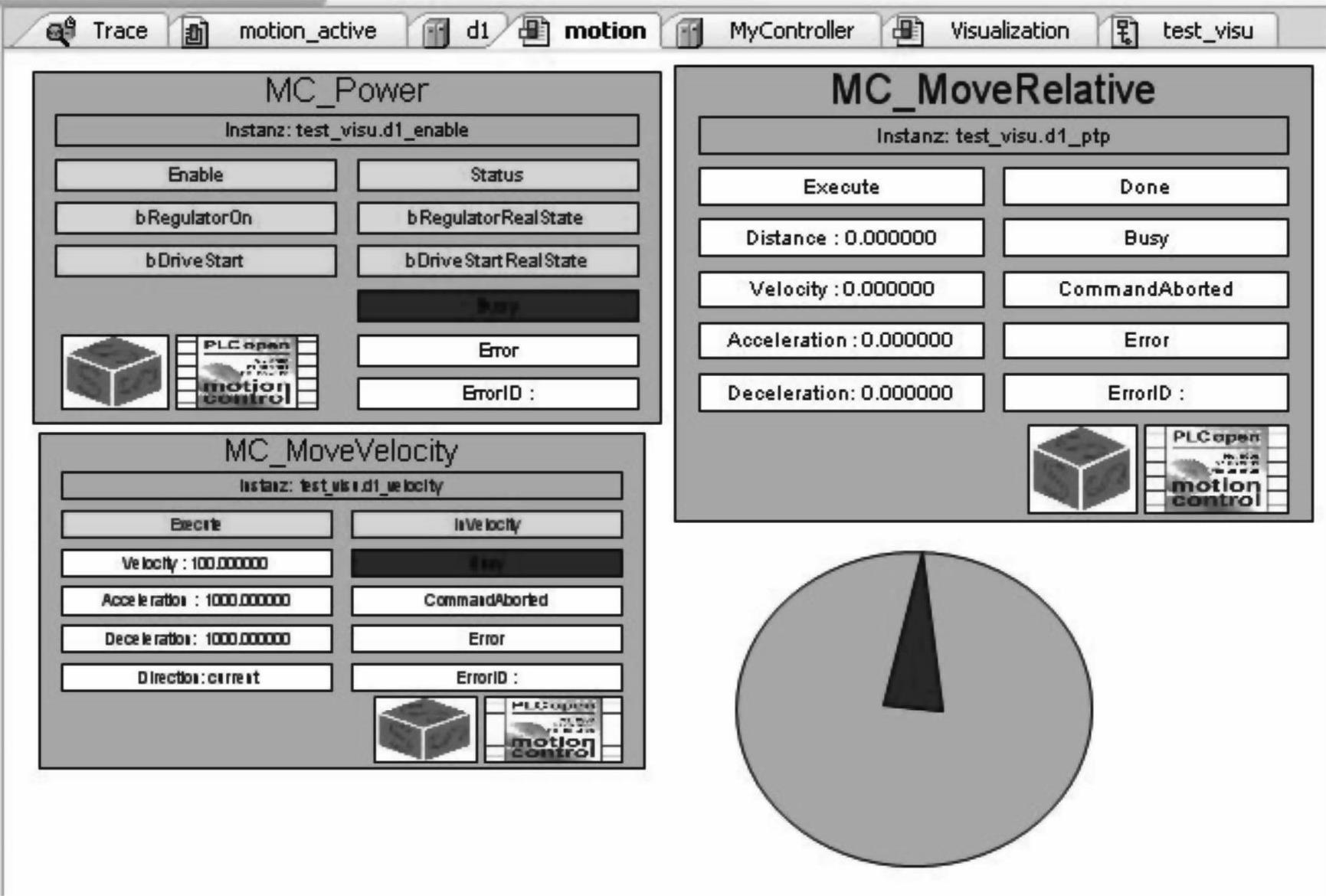
图9-70 速度控制
4.编辑一个跟踪曲线的动态显示
要编辑一个跟踪曲线的动态显示,首先就要建立并组态好一个曲线跟踪记录器即跟踪。把鼠标移到应用“Application”点鼠标右键,打开菜单,如图9-72所示。
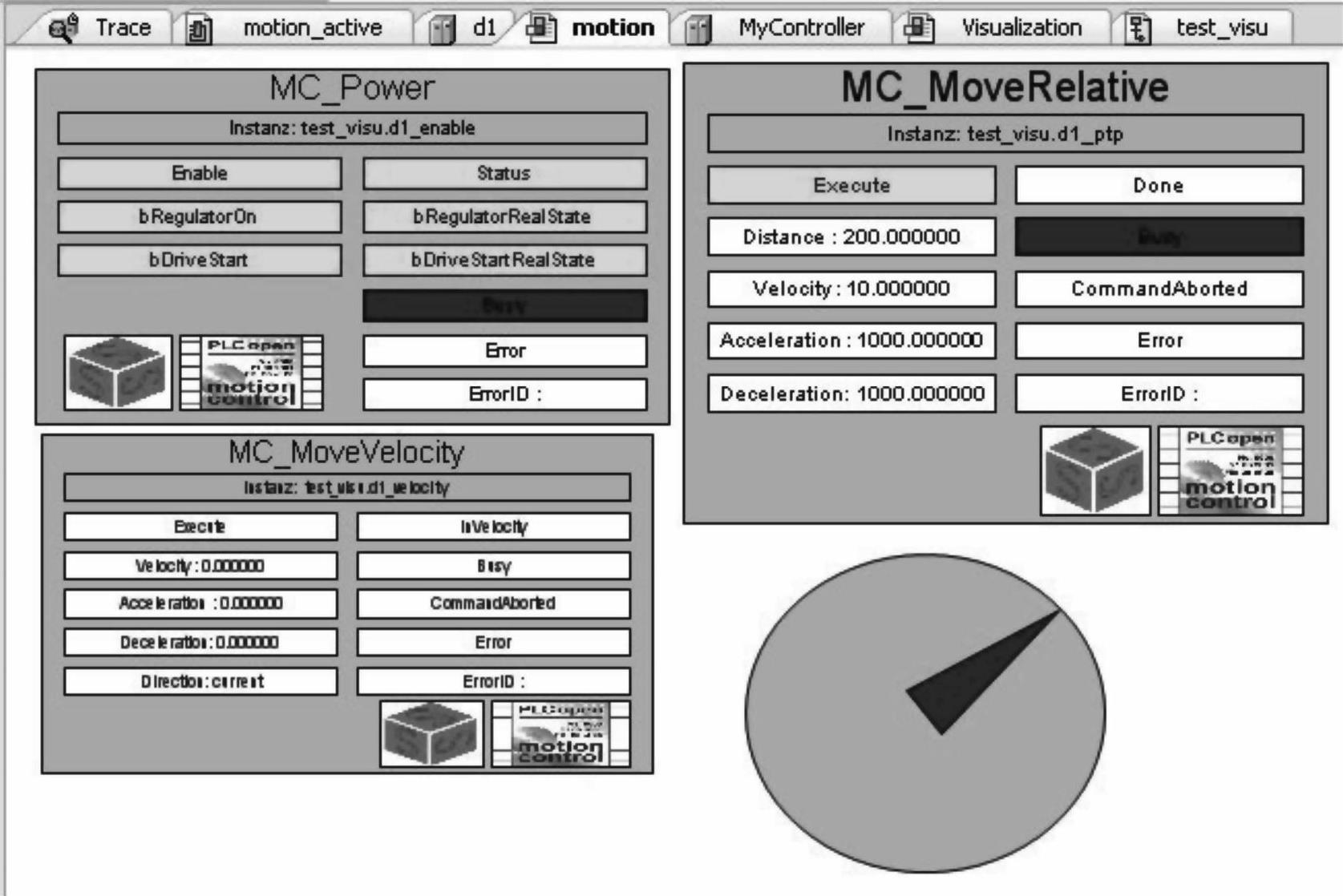
图9-71 位置控制
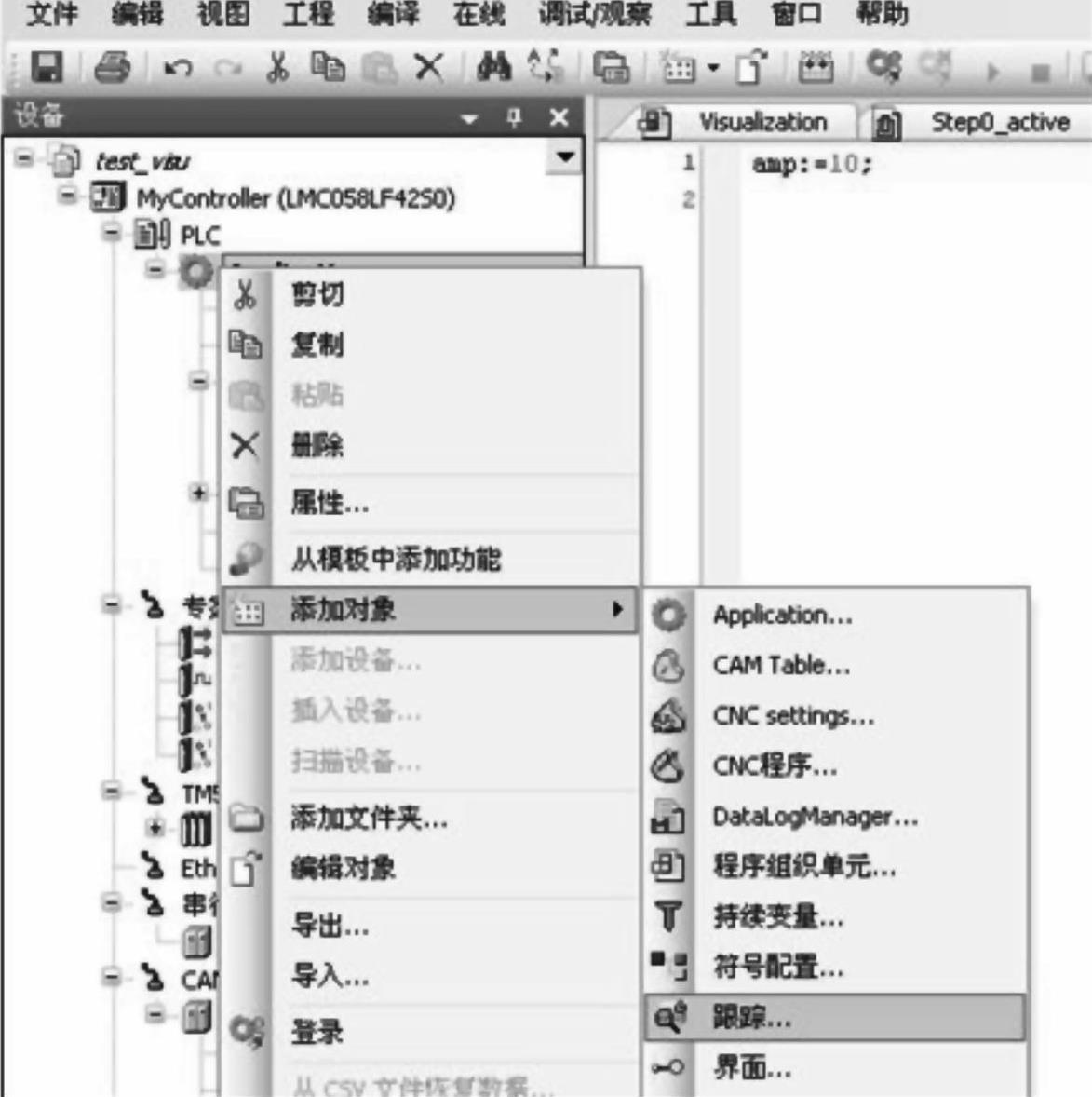
图9-72 建立一个跟踪
在打开的菜单中,选择跟踪。在弹出的框中命名此跟踪器的名字,如Trace,如图9-73所示。
图9-73 命名跟踪器
按“打开”,得到一个跟踪器框架,如图9-74所示。
图9-74 建立一个跟踪器
我们对这个跟踪器框架进行配置,点右键,打开下拉菜单,如图9-75所示。

图9-75 打开Trace菜单
把鼠标移到Trace点右键,打开菜单,选择配置,打开如图9-76所示的配置界面。
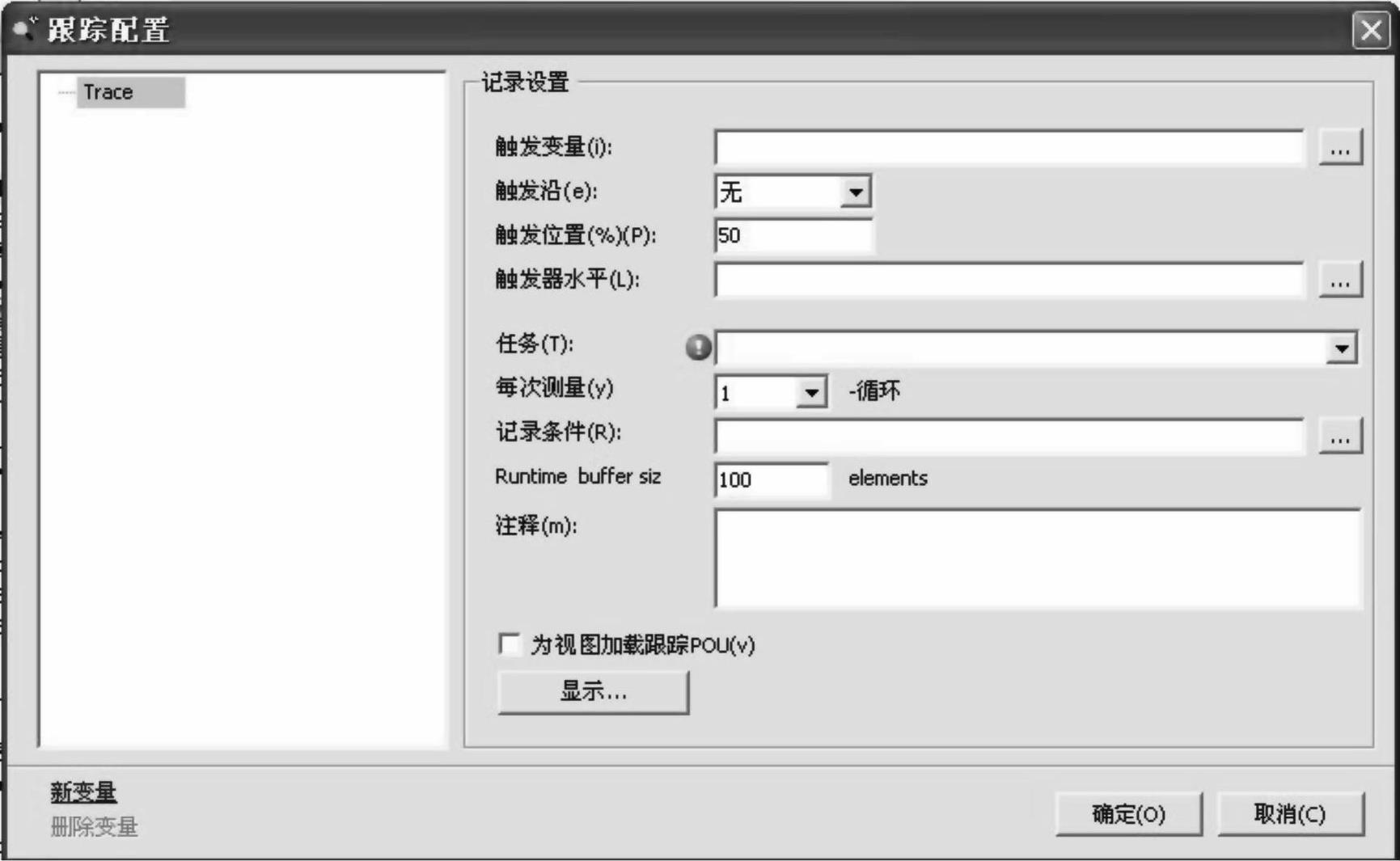
图9-76 跟踪记录器配置界面
配置一个曲线跟踪器如图9-77所示。
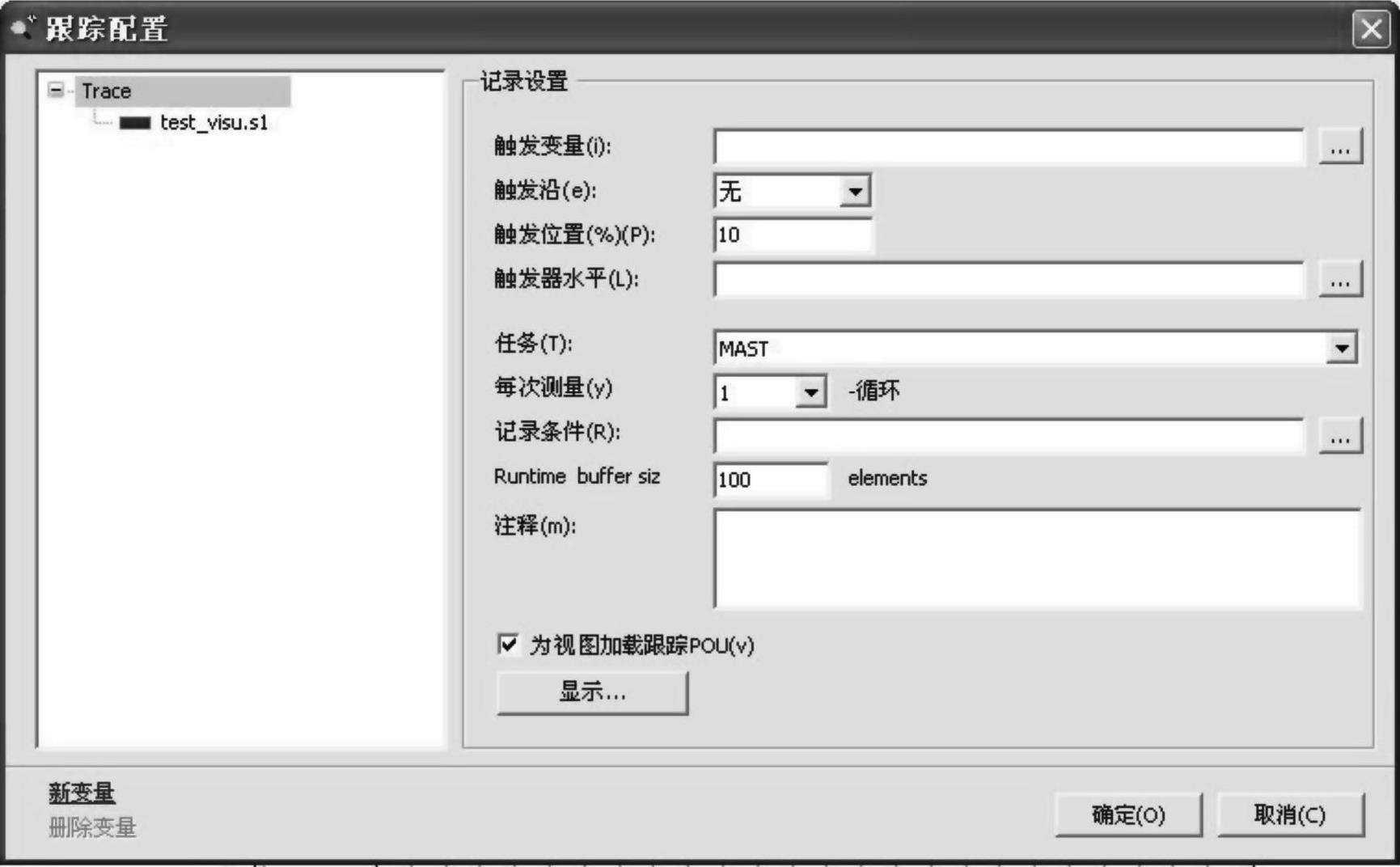
图9-77 配置一个曲线跟踪器
在这个跟踪器里,要记录的曲线是s1。要注意的是:我们要把这个曲线变化s1加载到视图,所以一定要激活为视图加载跟踪,如图9-77所示,在为视图加载跟踪前打勾。
点击“确定”后,在设备栏目下,有Trace名出现,如图9-78所示。
图9-78 添加了一个跟踪器Trace
打开已编辑好的视图Visualization,在视图下,打开工具箱,如图9-79所示。

图9-79 打开视图中的工具箱
点击工具箱中的复杂控制 ,打开此控制下菜单,如图9-80所示。
,打开此控制下菜单,如图9-80所示。
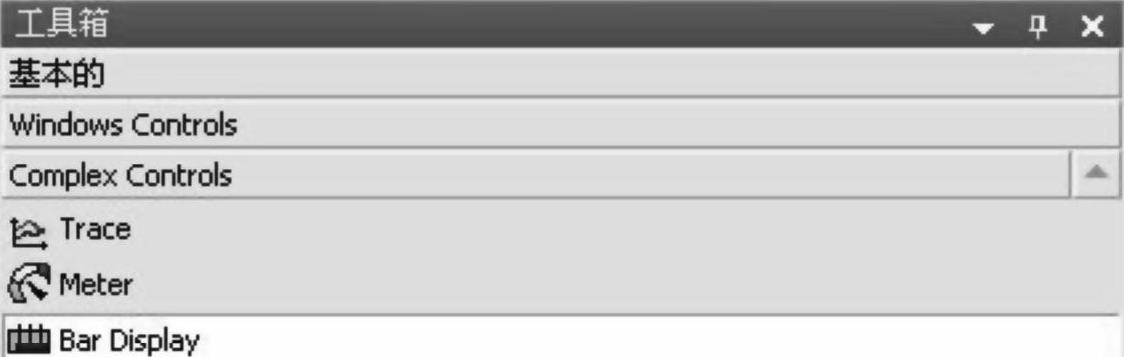
图9-80 复杂控制下菜单
选择Trace条目,在视图编辑区拉开一个显示框,如图9-81所示。
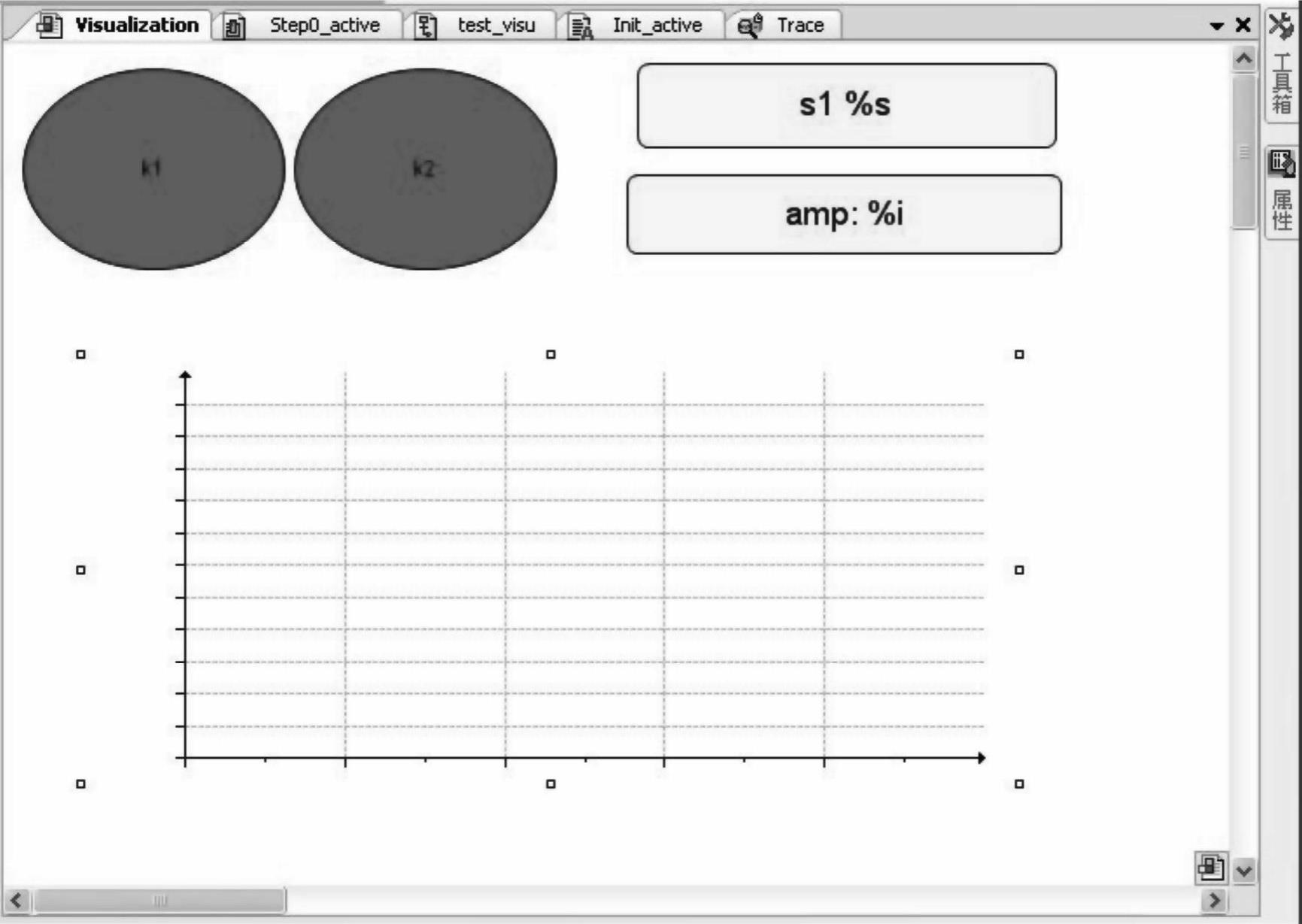
图9-81 在视图编辑区拉开一个显示框
点击“属性”,打开属性框,如图9-82所示。
在Trace栏,点击右侧帮助。
打开输入助手,在这里,选择要显示的曲线记录器Trace,如图9-83所示。
完成后的配置如图9-84所示。
配置完成后,我们就可以采用仿真来看一下效果。仿真并运行程序,这时在视图的显示框中就显示出了动态的曲线s1。图9-85所示是曲线振幅为10的情况。
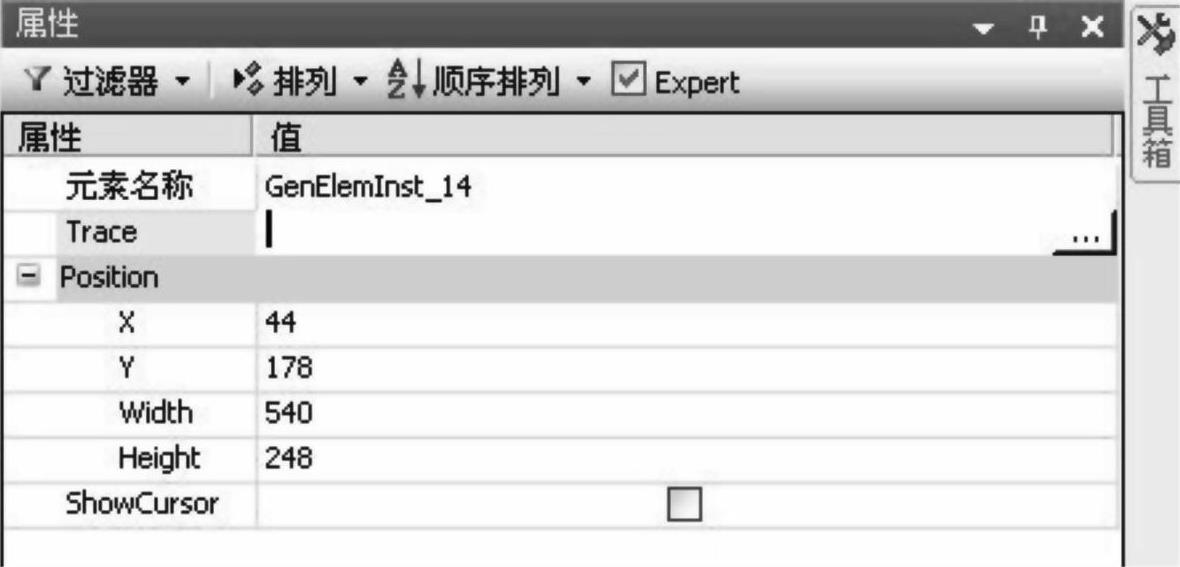
图9-82 显示框属性
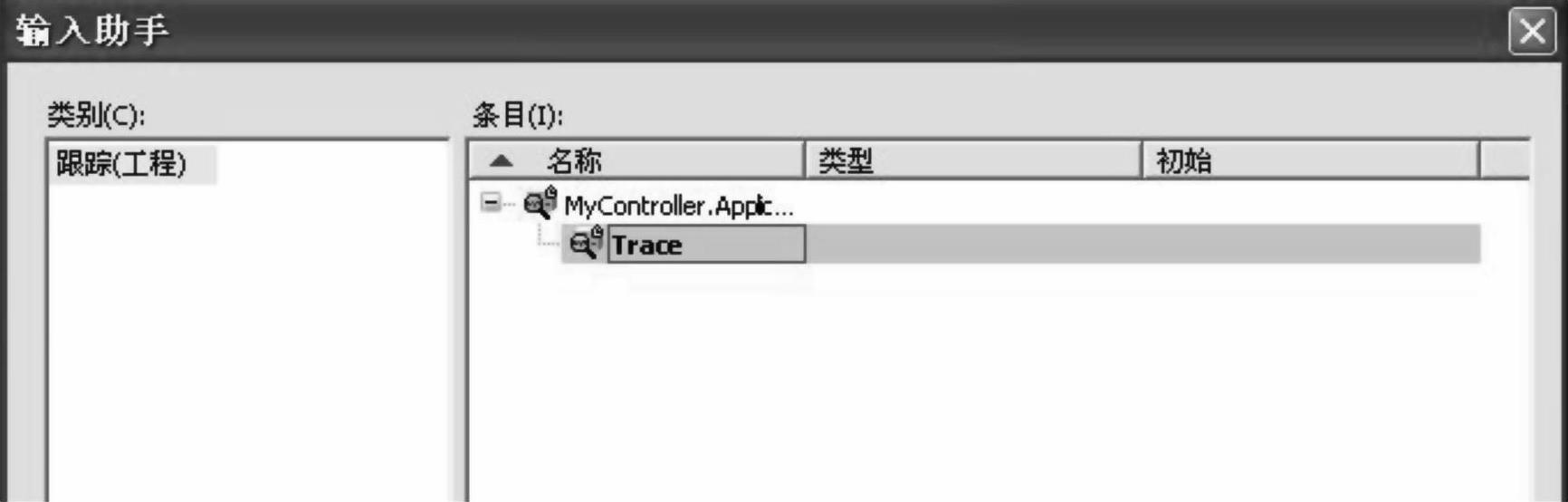
图9-83 选择要显示的曲线记录器
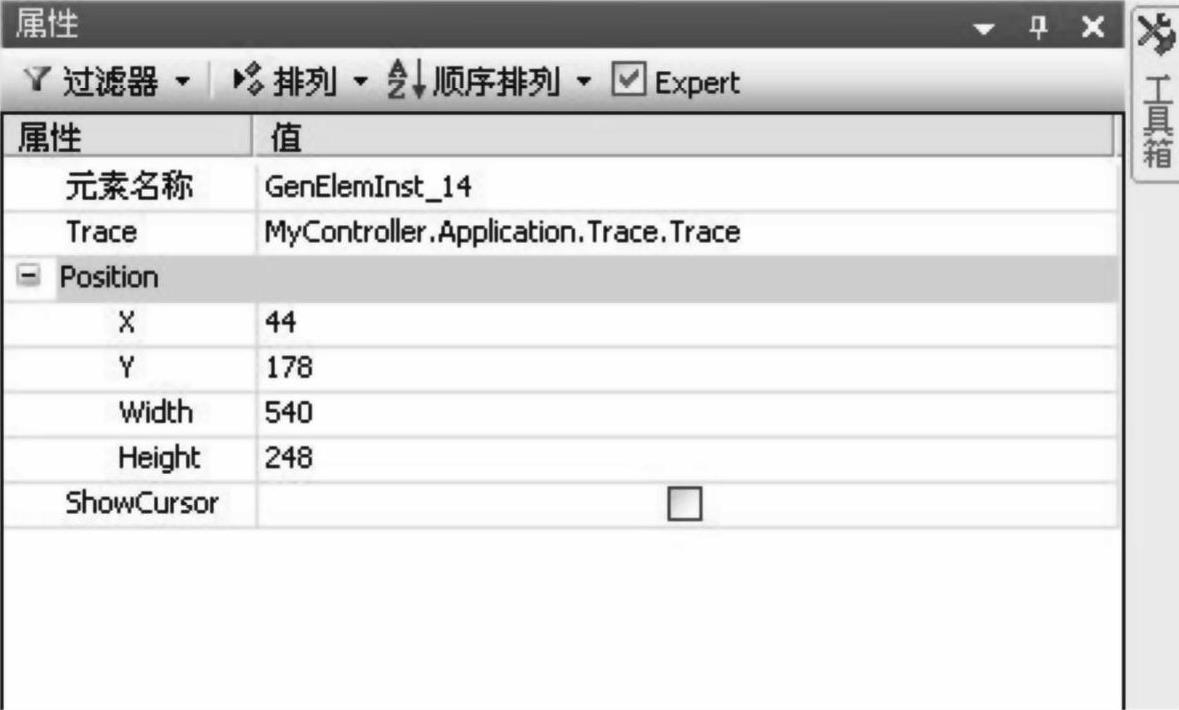
图9-84 视图中动态显示图的配置
当幅值改变为100时的仿真显示,如图9-86所示。
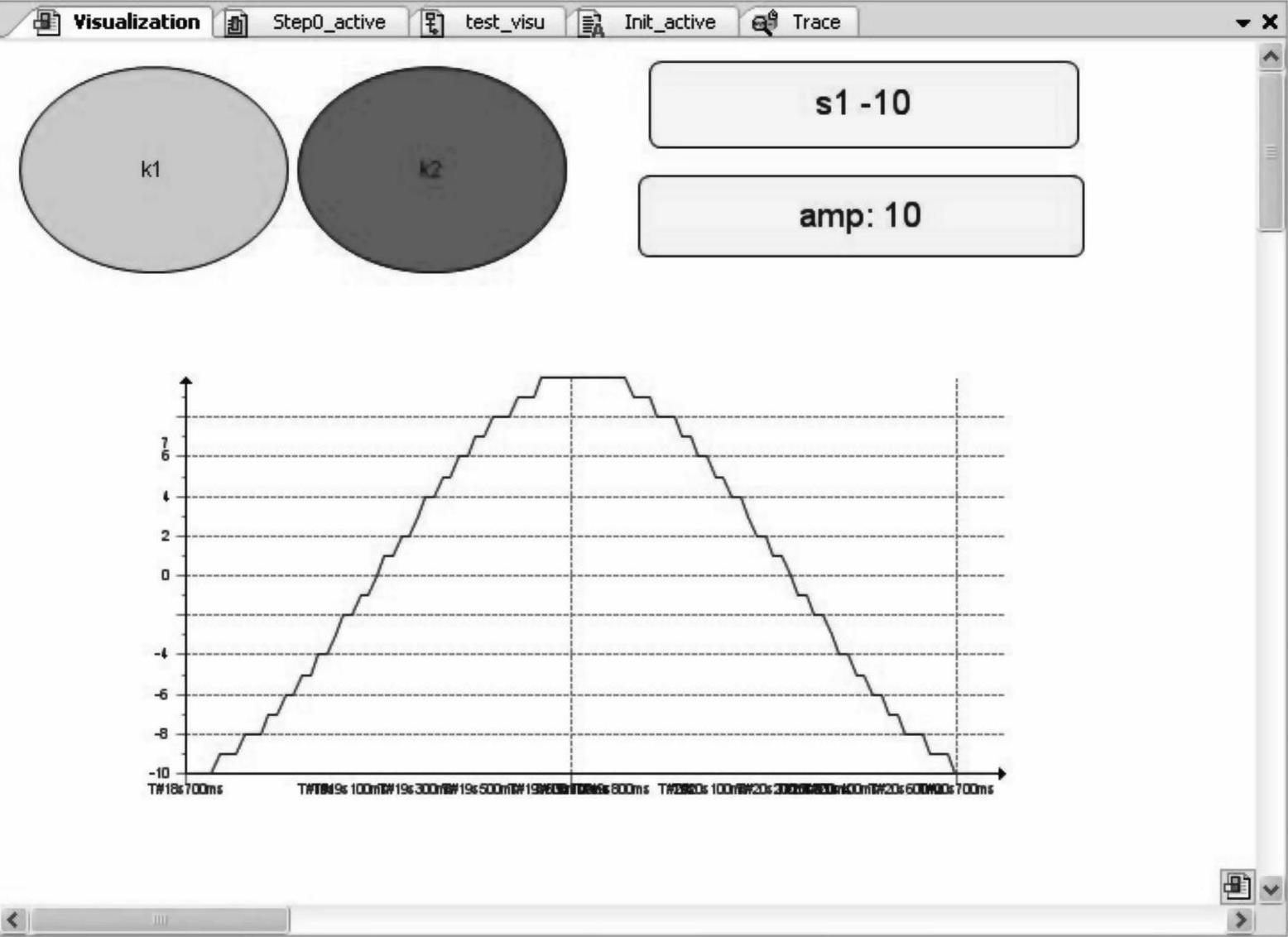
图9-85 曲线的动态记录显示
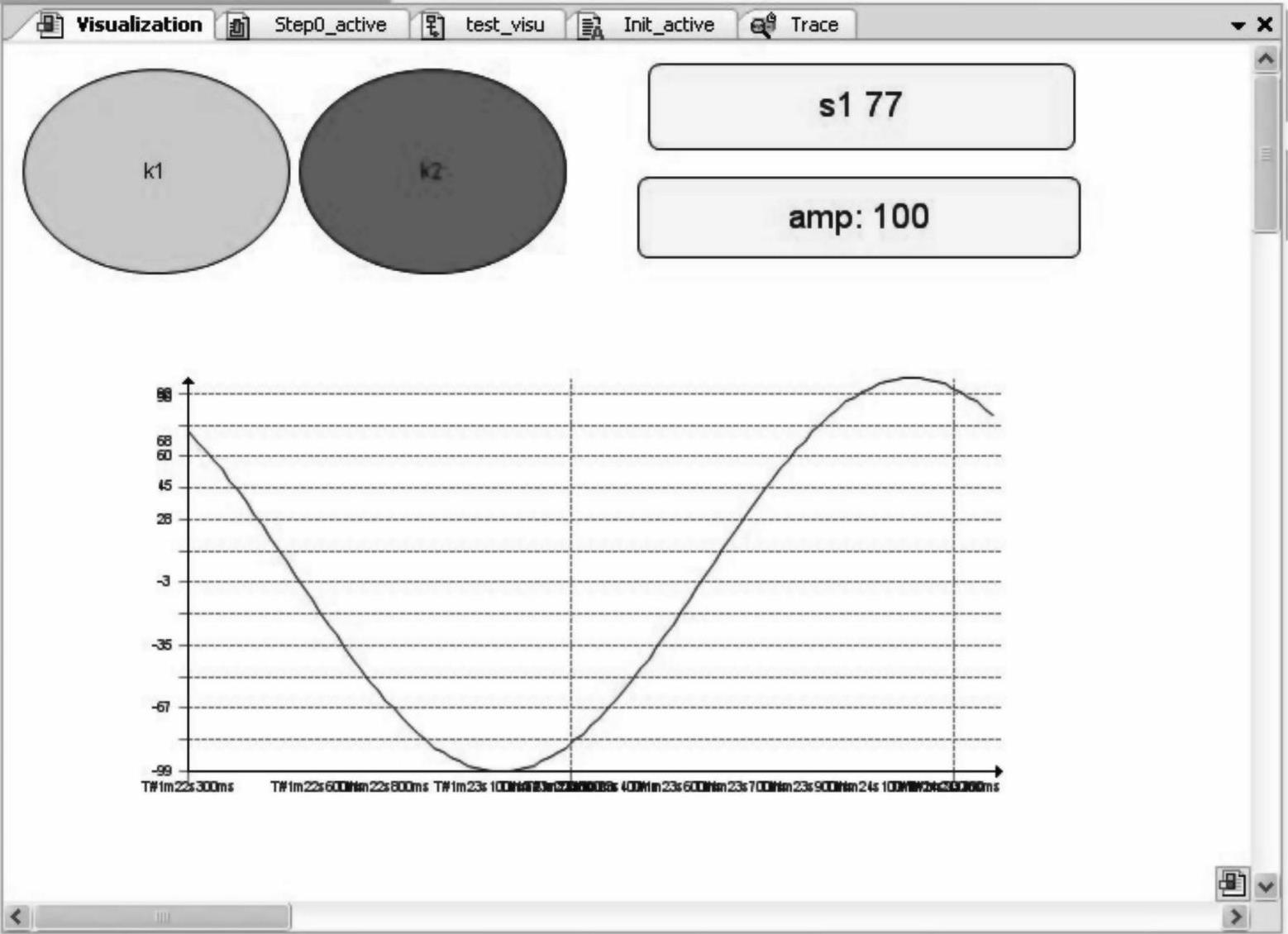
图9-86 幅值改变为100时的仿真显示
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






