【摘要】:从普通梯形机构一节可知,根据内、外轮转角的关系,不仅可以求出整车转弯半径,而且也能掌握梯形机构的转向特性。具体推导过程从略,此处直接列出摆臂式和齿条式两种梯形机构的内、外轮转角关系式。齿条三段式内、外轮转角的关系图3-115 齿条三段式内、外轮转角的关系第一式:S=f(α)式中第二式:β=f式中x、y、z分别为A、B、C三点满载时的原始坐标,r为梯形臂的顶视投影长度,θ为r与x轴的夹角。
从普通梯形机构一节可知,根据内、外轮转角的关系,不仅可以求出整车转弯半径,而且也能掌握梯形机构的转向特性。
如何求出断开式梯形机构的内外轮转角关系呢?研究这个问题可分两步走。
第一步:假设内轮梯形臂绕主销转过一个α角,并通过保持长度不变的过渡拉杆,带动横拉杆水平位移一个距离S(或摆臂转过一个δ角),从而得到一个关系式
或
第二步:把横拉杆的水平位移S作为输入(或把δ作为输入),外轮梯形臂的转角β作为输出建立β=F(s)或β=F(δ)的关系式。这就相当于得到了β=f(α)的关系式。
具体推导过程从略,此处直接列出摆臂式和齿条式两种梯形机构的内、外轮转角关系式。
(1)摆臂三段式内、外轮转角关系(图3-114)
图3-114 摆臂三段式内、外轮转角关系
第一式:δ=f(α)

式中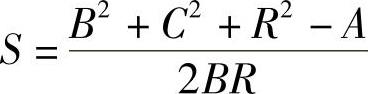
第二式:β=f(δ)

式中
 (www.daowen.com)
(www.daowen.com)
注意:
①假定梯形臂反时针转动时,D、C两点的z坐标不变。
②D、C两点间的空间杆长恒定。
③假定“C-C-B-B”刚体保持平动。
(2)齿条三段式内、外轮转角的关系(图3-115)
图3-115 齿条三段式内、外轮转角的关系
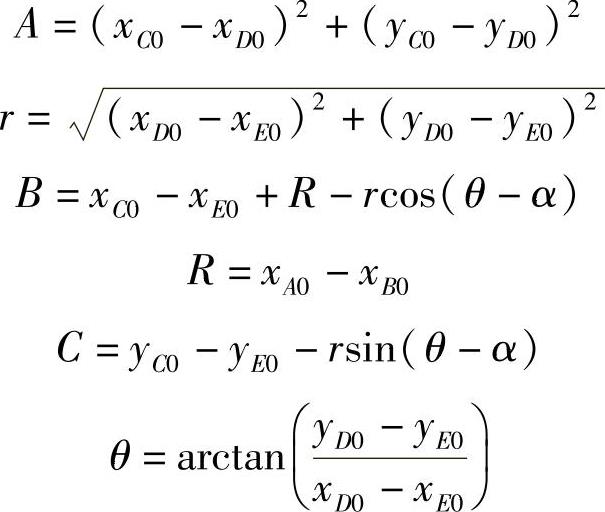
第一式:S=f(α)

式中
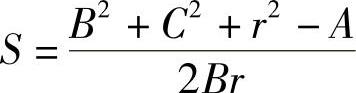
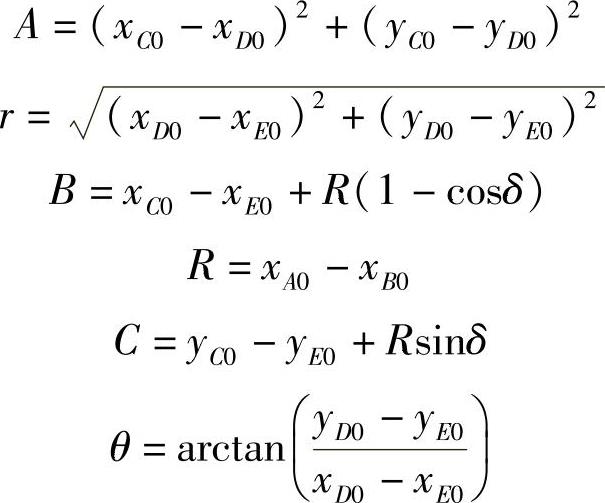
第二式:β=f(S)

式中
x、y、z分别为A、B、C三点满载时的原始坐标,r为梯形臂的顶视投影长度,θ为r与x轴的夹角。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关汽车悬架构件的设计计算的文章



