转向机构附加牵动轮转向,包含两个方面的内容:一是转向系统与悬架机构运动干涉造成的车轮转向;二是垂臂球头中心绕侧倾中心转动带来的车轮转向。这些都和梯形机构相关,下面分别进行研究。
(1)转向系统与悬架运动干涉的轮转向
转向系与悬架运动的不协调性,在可逆转向系统中,当车速较低时,往往造成方向盘的摆振;而在不可逆的转向系统中,当车速较高时,必将引起转向车轮的干涉转向。
现以图3-108所示的悬架和转向系统为例来研究这个问题。
图3-108所示为摆耳在后的纵置对称板簧悬架。转向机构为方向机在车轴之后的直拉杆式。图中点O为垂臂球头中心,点M为节臂球头中心。当车身上下跳动或者侧倾时,点M既以O点为圆心,以直拉杆长度为半径划弧运动,也以点M的轨迹中心P为圆心,以点M的轨迹半径R为半径划弧运动。两者的矛盾随悬架变化量的大小而变,或者随车身侧倾角的大小而变。
假设悬架的变形量为f,且点O与点M近似地在同一纵向平面内,那么两者运动的矛盾量就是S。在同一悬架变形量的情况下,由于摆耳位置以及点O和点M的布置位置不同,矛盾量的大小也将不同,而且压缩和反弹行程也不相同。我们研究和关心的是矛盾量较大的那个行程。
如何统一这个矛盾呢?假设不考虑球头胶件的变形和克服各种间隙,矛盾量S必将转化为转向节臂和车轮的角位移,如图3-109所示。
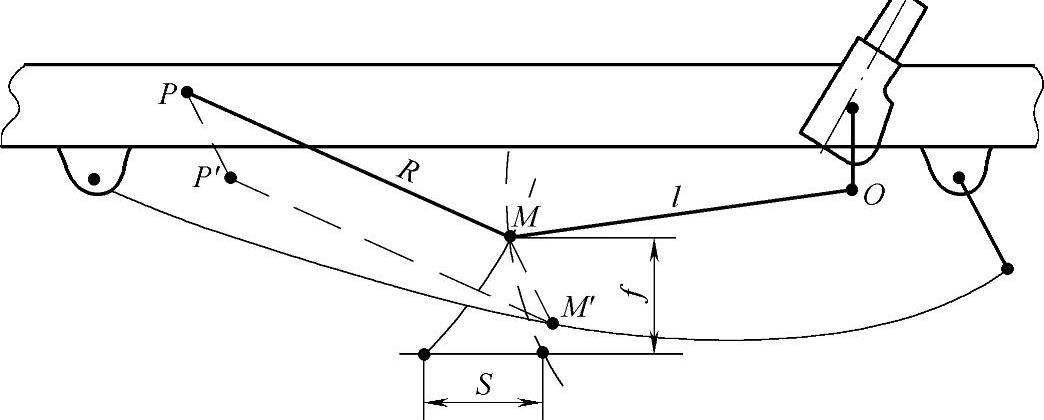
图3-108 悬架与转向系的运动干涉
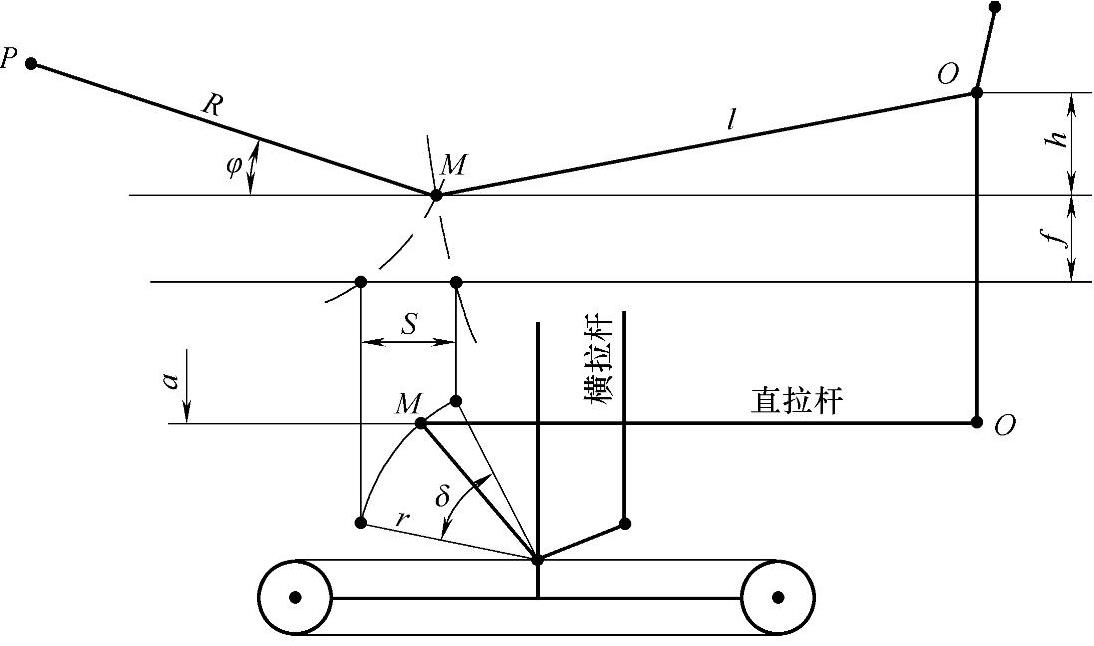
图3-109 水平位移与角位移
根据图3-109所示的几何关系,水平方向上的矛盾量S为

式中 R——节臂球头中心M的轨迹半径(mm);
φ——悬架推杆角(°);
l——直拉杆的长度(mm);
h——l在垂直方向上的长度(mm);
f——给定悬架的垂直位移(mm)。
f一般以车身在0.4g侧向加速度j的作用下的侧倾角θ来计算

式中 θ——车身侧倾角(rad);
a——节臂球头中心至车身中心线的距离(mm)。
式(3-352)中的正负号,是由垂臂球头中心O的位置与节臂球头中心M的轨迹中心P的位置来决定的。如果O、P二点在车轴的异侧(图3-109),应取正号;同侧则取负号。由此可知,板簧固定吊耳与转向机同侧布置,可使运动干涉大为降低。
求出了水平方向上的矛盾量,便可算出车轮偏转角(梯形臂转角)为

式中 δ——车轮偏转角(rad);
r——节臂长度(mm)。
轴偏角到底反映了什么转向性质呢?假设方向盘内转,车身外倾,则图3-109中的点O上提,这相当于点M下移,此时的矛盾量S需要节臂内转来统一,故此转向属于过多转向;反之,若方向盘外转,节臂依然外转,仍属过多转向。假若不转方向盘,只是车身上下跳动,此时必将造成车轮来回摆振,将导致不同转向趋势的交替出现。
(2)垂臂球头中心侧倾轮转向
汽车转向机构的形式大多数是以纵向上的直拉杆带动转向节臂转动。然而,部分汽车的转向机构却是以横向上的横拉杆带动节臂转动,进而带动梯形臂转动。BJ212越野汽车就属于这种形式,如图3-110所示。
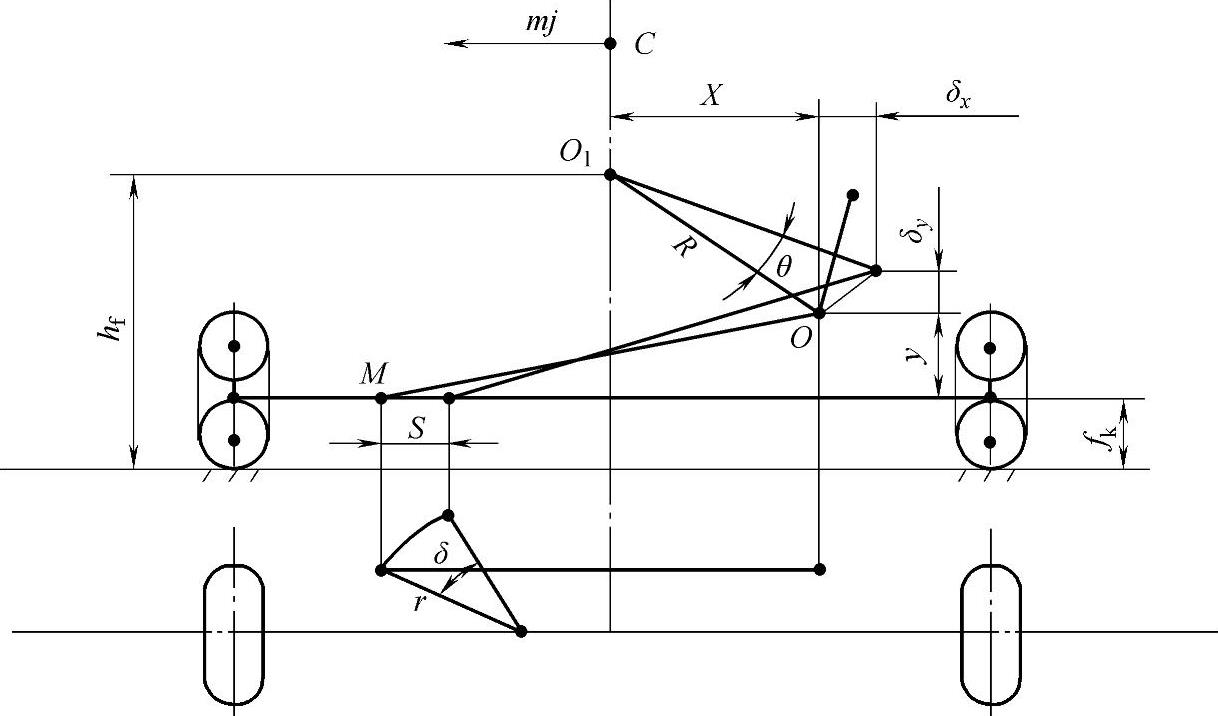
图3-110 转向机构轮转向
由式(3-354)所求出的车轮偏转角,仅是内轮偏转角,由于此偏转角较小,故可近似认为此轮偏转角就是轴偏角。(www.daowen.com)
计算示例3
示例车型为燕京YJ620型轻型客车。
该车前板簧倾角ξ=3°,固定吊耳在前,簧长L=1200mm,采用“柏林式”卷耳,满载弧高F=7mm,夹紧长度d=92mm,方向机与固定吊耳同侧。
直拉杆长度l=740mm,垂直方向投影长h=139mm,节臂球头中心至车身重心的距离a=525mm,节臂长度r=135mm。
计算推杆长度和推杆角为

假设车身在0.4g侧向加速度的作用下的侧倾角θ=3.5°,那么由式(3-353)便可算出悬架变形量(节臂球头中心相对车身的垂直位移)为

水平方向上的矛盾量S为

用式(3-354)计算车轮偏转角(梯形臂转角)为

1.44°这个较小的轮偏角,说明该车型的布置方案是较合理的。反之,在同样条件下,如果P、O两点异侧布置,那么水平矛盾量将超过10mm,轮偏角可达4°。
由式(3-354)所计算的轮偏角,仅是转向机构一侧的车轮偏转角,为简化分析,此处就把它当作车轴偏离角。
车身在侧向加速度j的作用下,置于车身上的垂臂球头中心点O便绕侧倾力矩中心O1转过一个θ角。同时通过横拉杆带动节臂球头点M横向移动了一个距离S。这个横向位移必然是通过节臂和车轮的偏转来实现的:

式中 l——横拉杆在横向平面上的长度(mm);
x、y——垂臂球头中心点O的坐标(mm);

hf——侧倾中心O1距地面的高度(mm);
rk——车轮滚动半径(mm);
θo——点O及点O1的连线与纵向平面的夹角(°),θo=arcsin(x/R);
θ——车身侧倾角(°)。
计算示例4
示例车型有关参数:l=900mm,x=150mm,y=40mm,hf=550mm,rk=365mm,节臂长r=145mm。
取侧向加速度j=0.4g时,侧倾角θ=3.5°。由式(3-355)可以计算下述参数:
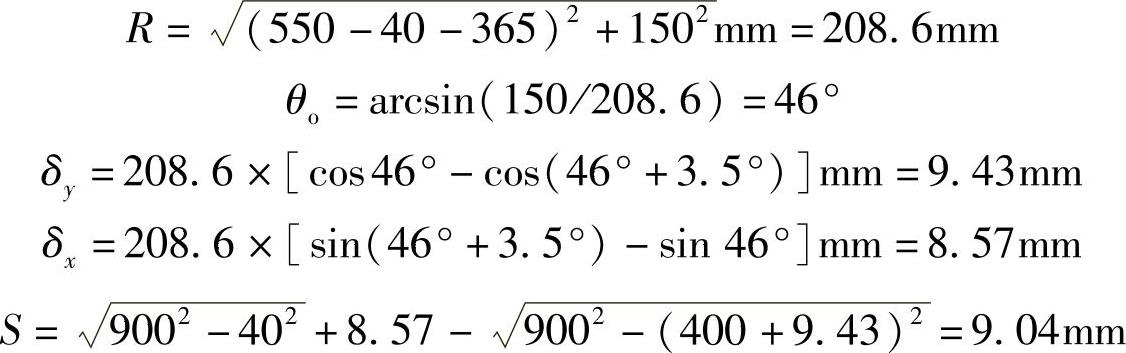
利用式(3-354)计算车轮偏转角为

由图3-110的情况可知,所增σ角是与转弯方向一致的,故属过多转向趋势。
假如在其他条件相同的情况下,使侧倾中心Ol降低,便可减少车轮偏转角。若使点O1低于垂臂球头中心O,那将使过多转向趋势变为不足转向趋势。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




