研究对称板簧的运动特性,首先要摸清它的导向机构,摸清主叶片中心点的运动规律,即要找出它的运动瞬心,包括悬架中心以及轨迹半径及其与水平面的夹角等。
1.轨迹中心和轨迹半径所谓轨迹半径,指的是主叶片中心点的轨迹半径R,也叫“推杆”。C′点是M′点的轨迹中心,在已知板簧主片伸直长度L和夹紧距离d的情况下,轨迹半径的长度可近似表示为

图3-30中的点C就是悬架中心,是相关点车轮着地中心M的轨迹中心,它是按平行四边形法则将C′点平移的结果。因此,也把CM(长度为R)叫做“推杆”。对于其他相关点的轨迹中心,均可按平行四边形法则求得。
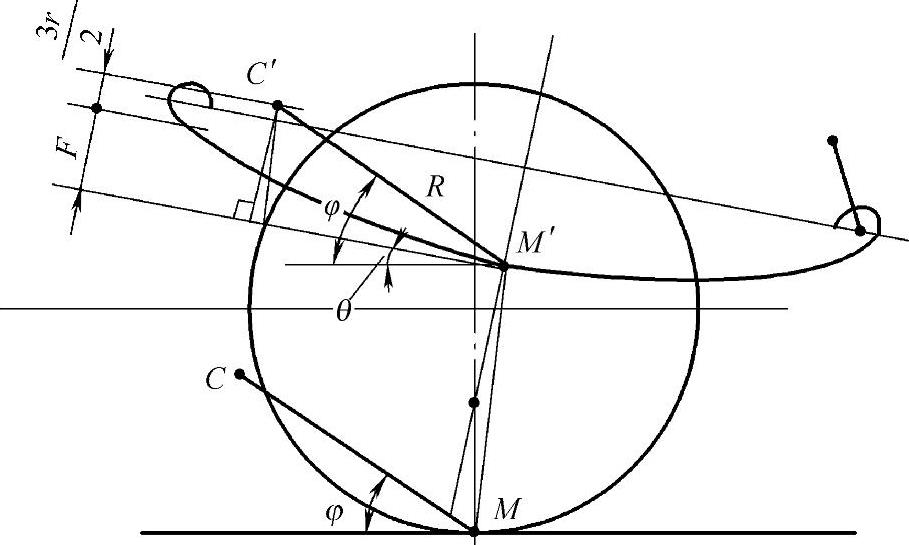
图3-30 对称板簧的“推杆”角
2.“推杆”角φ(https://www.daowen.com)
“推杆”角φ是指在满载状态下,“推杆”(轨迹半径)CM与地平面的夹角。在已知板簧相对于水平面的夹角为θ、满载弧高为F、板簧卷耳半径为r、C′为板簧主片中心M′的轨迹中心的前提下,由图3-30的几何关系可得对称板簧的“推杆”角为

式中,F后的正负号,上卷耳式取正,下卷耳式取负,对称式(柏林式)2r/3为0;θ前的正负号,板簧前(后)倾,摆耳在前(后)取正,板簧后(前)倾,摆耳在前(后)取负。
由式(3-79)可知,对前桥来说,板簧满载弧高为正、后倾布置、摆耳在后端的悬架,φ1不仅在第二象限,且数值较大;对后桥来说,满载弧高为负、前倾布置、摆耳在后端的悬架,φ2不仅在第三象限,且数值较大。这两种情况合在一起,是纵向力矩臂el增大的典型情况,对车身稳定性是最为不利的。然而,根据三正切定理,此种情况对转向特性却是最为有利的。
当φ1在第二象限时,δ1为正值(车桥回转方向与转弯方向相反);当φ2在第三象限时,δ2为负值(车桥回转方向与转弯方向一致)。所以,前、后桥偏离角差Δ=δ1-(-δ2)增大,增强了不足转向趋势,如图3-29所示。
上述分析也说明了车身稳定性和操纵稳定性总是矛盾的。此种矛盾情况,任何悬架都不例外,不同之处,仅是影响ϕ的数值和方向的是悬架形式和杆系参数。式(3-79)既可用来评价车身稳定性,也可用来评价操纵稳定性。正如上节所述,ϕ值的大小还牵涉很多问题,因此不宜过分追求纵倾力矩臂的大小,而应全面考虑。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





