悬架运动学特性是指当车轮跳动时,前轮定位参数、轮距、前轮侧向滑移量等参数相应变化的规律。这一规律是由导向机构所决定的,它直接影响汽车的使用性能,特别是操纵稳定性、平顺性、转向轻便性和轮胎的使用寿命等。
1.车轮初始定位参数
(1)主销内倾角和后倾角
主销内倾角和后倾角均定义为正,反之为负。主销内倾角γi与后倾角γr可根据Au、Ad两点的坐标由式(3-41)和式(3-42)计算为


(2)车轮外倾角和前束角
车轮外倾角γo由轮心O与接地点E的坐标确定,定义车轮外倾角外倾为正。外倾角用式(3-43)计算为

式中 R——轮胎的静半径。
车轮的前束角θT由车轮的轮心O与接地点E的坐标确定,定义前束角内收为正。前束角用式(3-44)计算为

(3)主销后拖距及内倾距
设主销延线与地面的交点为P,其x、y坐标分别为


从而主销的后拖距ar为

主销的偏移距ai为

2.导向机构随下臂或上臂的运动关系
导向机构随摆臂运动的问题是三维空间的问题,此处把它放在YZ平面内的二维空间来处理。其理由是,在理论上我们认为Au、Du、Ad、Dd、E(O3、O4、O2、O1、O5)五点的x轴坐标相等,这就是说,这个问题本来就是个平面问题,何必把问题复杂化呢?再则是在二维空间内,可以轻易地获得显式函数的结果,使问题大为简化。
此处利用简明的复数法来建立机构随下臂或上臂运动的数学模型。在所研究的问题里,导向机构其实就是一个“四杆机构”,如图3-19和图3-21所示。我们把“四杆机构”的杆长设为Rk(k=1,2,3,4),若弹性元件装于下臂之上,则杆R1这个下臂就是主动臂。作用于主动臂臂端Ad(O2)点的力(力矩)使下臂绕枢轴点Dd(O1)反时针旋转。
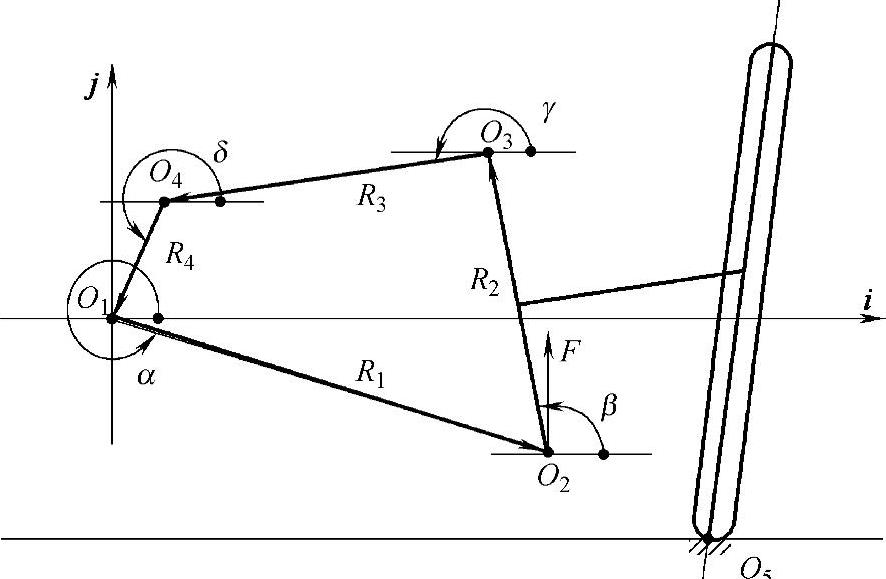
图3-21 导向机构的运动规律
假设下臂转过了α角,其他各杆转角分别为β、γ和δ。由于Rk和δ为已知参数,α为独立变量,要推求的只有β和γ。
若弹性元件装于上臂之上,则杆R3这个上臂就是主动臂。作用于主动臂臂端Au(O3)点的力(力矩{使上臂绕枢轴点Du(O4)逆时针旋转。假设上臂转过了γ角,其他各杆的转角分别为α、β和δ。由于Rk和δ为已知参数,γ为独立变量,则要推求的只有α和β。
在图3-21中,“四杆机构”全部为铰点,且复数Rk构成封闭环路,即

按指数写法为

根据欧拉公式有

所以,复数实部为

由复数虚部得

若弹性元件装在下臂上,则α为独立变量,故可由式(3-52)和式(3-53)解得
 (www.daowen.com)
(www.daowen.com)
式中

在已知β后,由式(3-53)可解得

若弹性元件装在上臂之上,则γ为独立变量,故可由式(3-52)和式(3-53)解得

式中 ;
;

在已知β后,由式(3-53)解得

3.车轮着地点随摆臂运动的关系
在图3-22中,弹性元件无论装在下臂上还是装在上臂上,车轮着地点的变化都是由R1、R5、R6、rK和R所构成的闭环决定的。因此,复数R以及对应的x、y便可由式(3-58)~式(3-60)给出

4.相关参数与摆臂运动的关系
相关参数指轮距B、车轮外倾角ξo、主销内倾角ξi、悬架中心C和力矩中心O等,如图3-23所示。
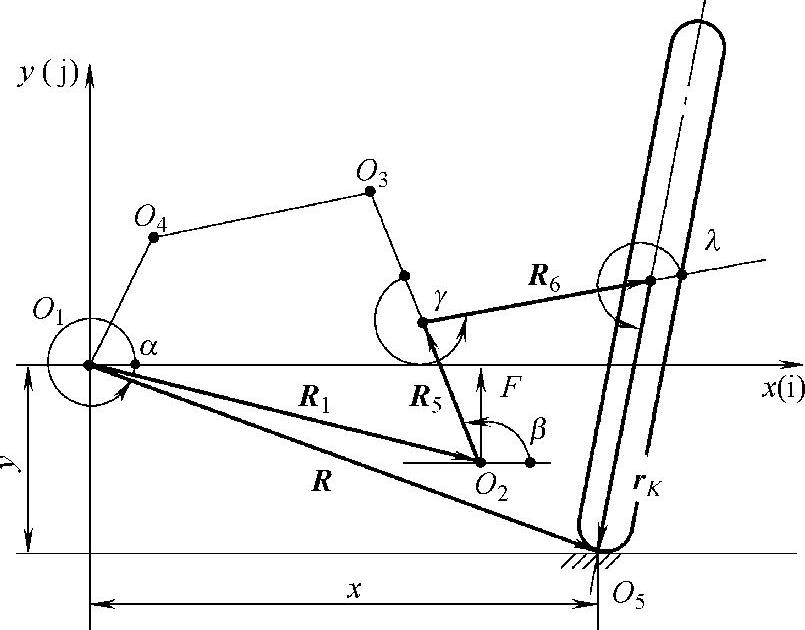
图3-22 车轮着地点随下臂运动的关系

图3-23 相关参数与摆臂运动的关系
这些参数不但随摆臂的运动而改变,而且对悬架刚度、行驶稳定性和车身稳定性等都有至关重要的作用。
根据图3-21~图3-23的关系,加之已经导出的结果,便可得到下列相关参数的表达式。
(1)车轮外倾角ξo

(2)主销内倾角ξi

式中 ξ——主销与杆O2O3(R2)的夹角。
(3)轮距

式中 S——左、右悬架摆臂枢轴点间的距离。
(4)杠杆参数l1、l2
杠杆参数l1和l2不仅是确定悬架中心C和力矩中心O的过渡参数,也是推求悬架刚度必不可少的参数。由图3-23的几何关系可得

(5)悬架中心C的纵坐标h

对于式(3-64)~式(3-66)中的“±”号,摆臂内交者取正,反之取负。
(6)力矩中心O的纵坐标H

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




