在绘出双横臂悬架空间模型的前提下,列出相关点的坐标,并利用这些坐标确定上下摆臂的坐标,然后利用YZ平面和XZ平面的模型确定悬架中心和力矩中心。
1.空间模型
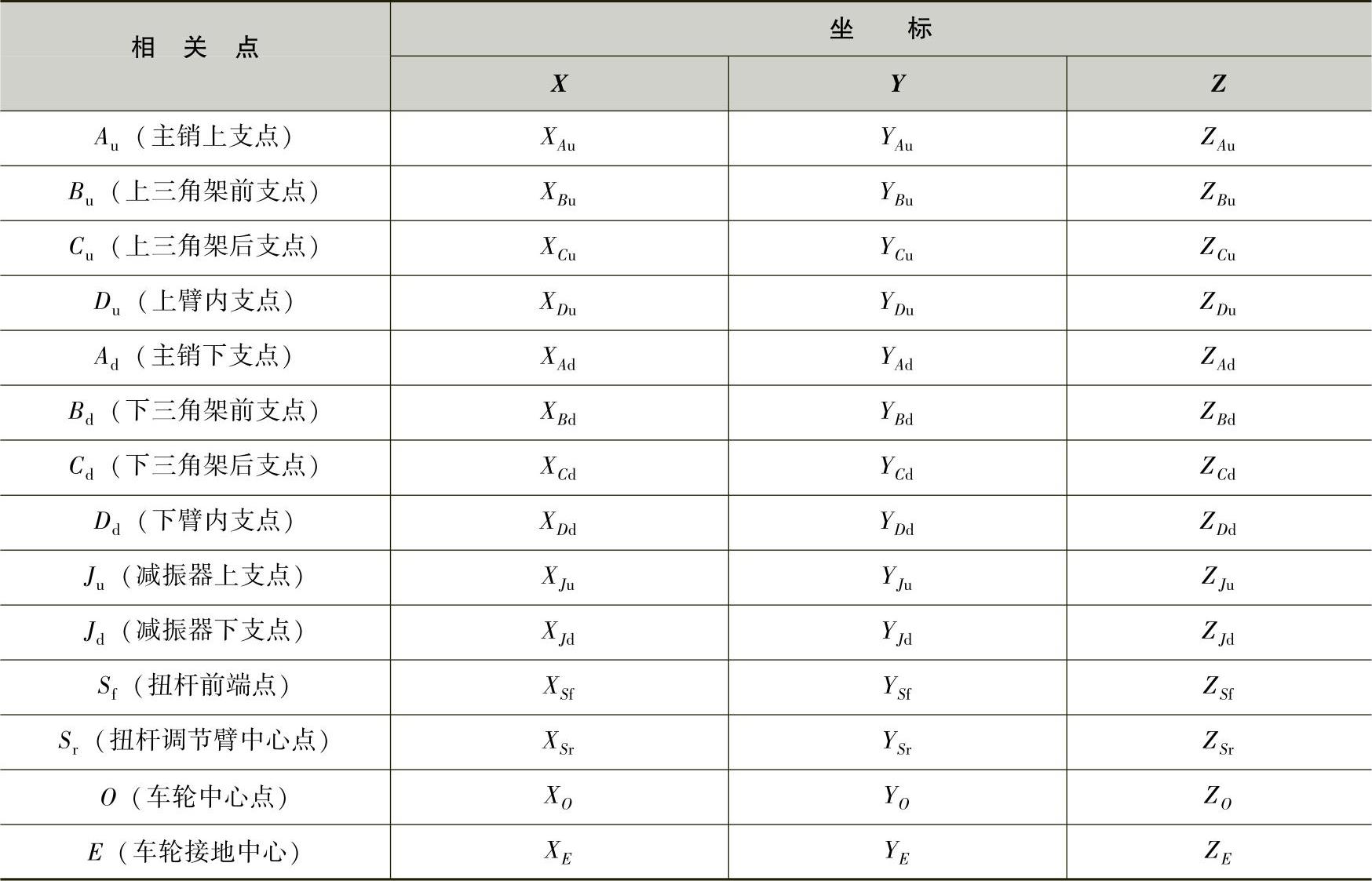
双横臂悬架空间模型如图3-17所示。图中除上、下三角架外,还有扭杆、减振器以及转向机构等。相关点的坐标列于表3-1中。
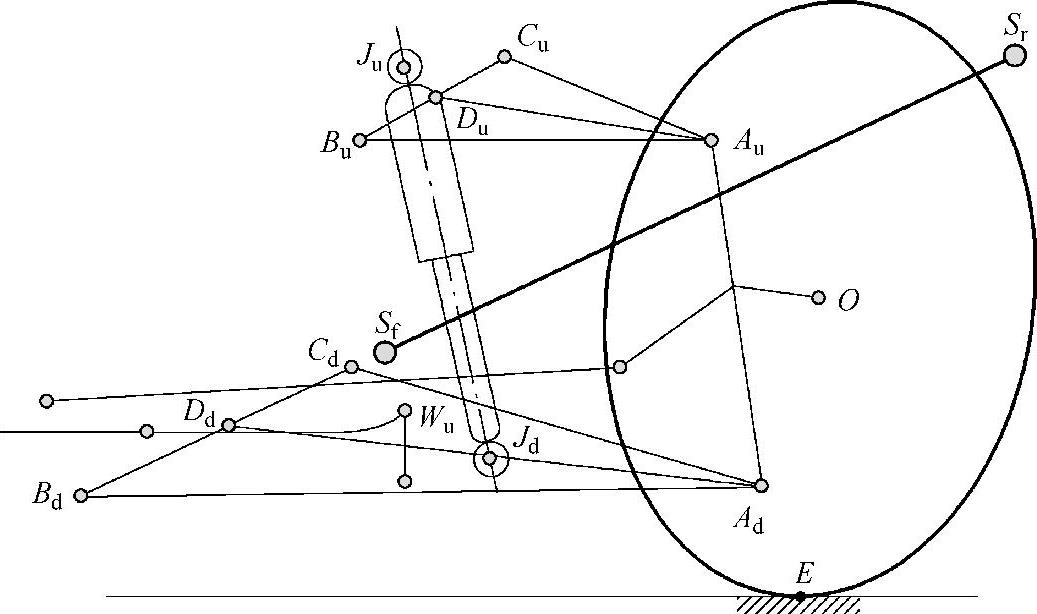
图3-17 双横臂悬架空间模型
表3-1 双横臂悬架相关点的代号及坐标
2.上下臂的坐标
双横臂悬架常做成双叉杆式或A臂式,如图3-17所示。它利用上三角架AuBuCu和下三角架AdBdCd将车轮和车身联结起来。为简化分析和计算的需要,常将上、下三角架各简化为摆臂,也就是图3-17中的AuDu和AdDd。因此确定上、下臂的坐标,也就是在已知三角架三点A、B、C的坐标的情况下,确定Du和Dd两点的坐标。确定的具体步骤如下所述。
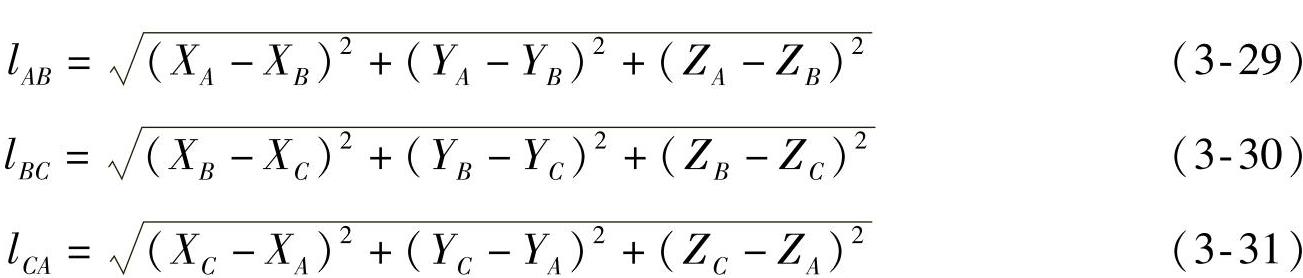
(1)计算“三角架”各边的空间长度
设x、y、z为“三角架”各点的坐标,那么“三角架”各边的实际长度可根据图3-18的关系利用下列三式计算:
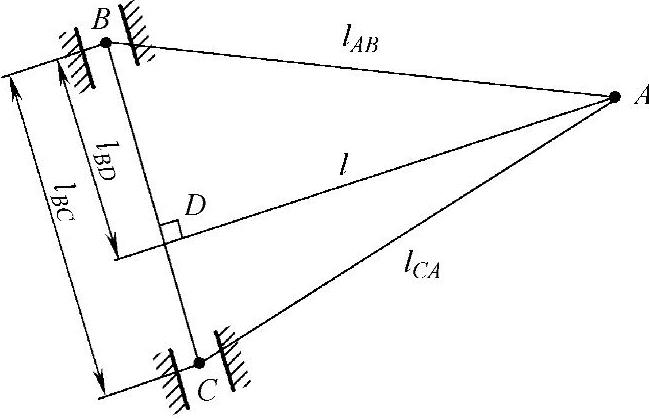
图3-18 摆臂坐标的确定
(2)确定臂端坐标
在实际边长的三角形中,过点A所作边长lBC的垂线AD(长度为l)便是臂长,其垂足D便是臂的另一端点,与点D相关的BD(长度为lBD)和臂长AD(长度为l)可用下列两式计算:

式(3-32)中,垂足在三角形中部或在外下部者取正,其余取负。
垂足的坐标可用下列公式计算:
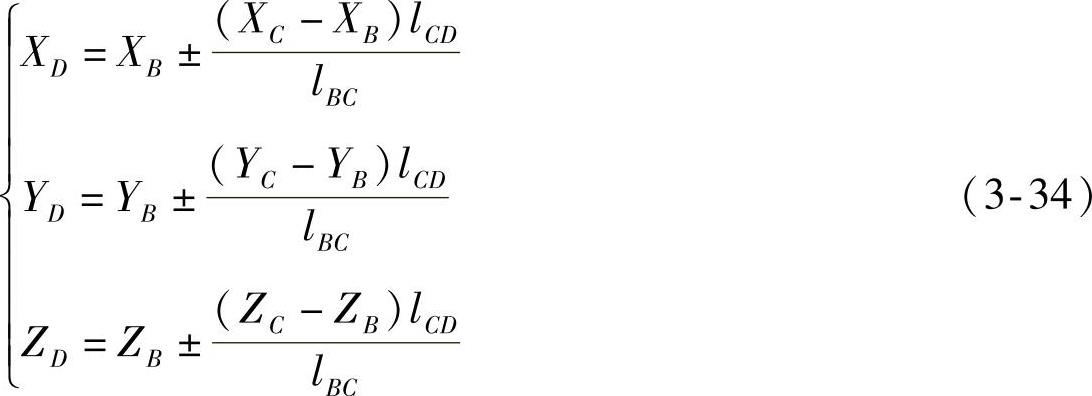
垂足在△ABC中部者取正号,其余为负号。
3.悬架中心和力矩中心
为方便求出横向悬架中心和纵向悬架中心,把模型分别建立在YZ平面和XZ平面上。(www.daowen.com)
(1)横向悬架中心和侧倾力矩中心
横向导向机构分别由上臂AuDu和下臂AdDd构成,如图3-19所示。它属于摆臂外交式。
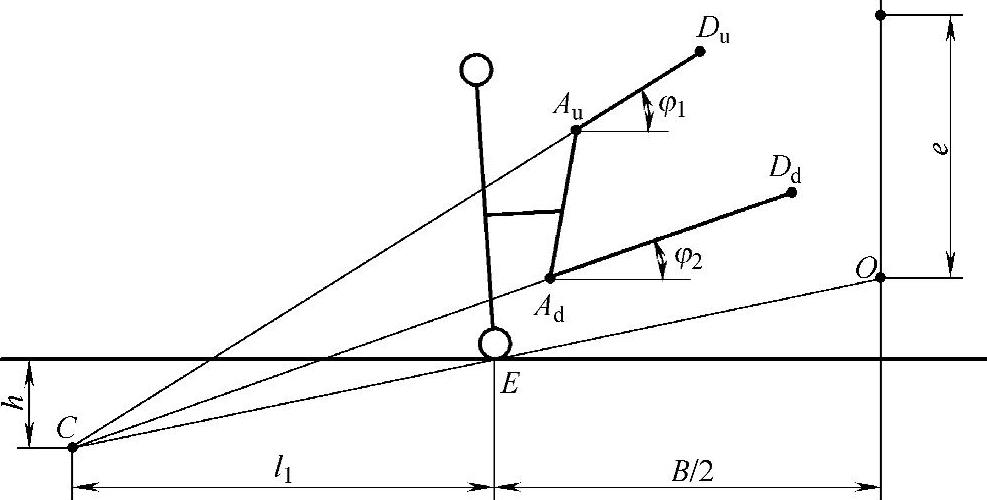
图3-19 横向导向机构
点Au、Du以及Ad、Dd的连线的延长线汇交于车轮外侧的点C,此点便是横向悬架中心。请注意AuDu和AdDd是满载时的空间直线,其延长线不一定交于一点。正因为如此,在设计时,务必要保证Au、Du、Ad、Dd、E五点基本共面,即应使其x轴坐标基本相等。因此,上、下“三角架”的设计是不可随便的。
点C与车轮着地中心点E的连线的延长线与车身中心线(中性面)的交点O就是侧倾力矩中心。侧倾力矩中心与悬挂质体质心的高度差便是侧倾力矩臂e。
横向悬架中心C的位置由高度h和长度l1决定,而在横向平面内上、下臂所在直线的方程为
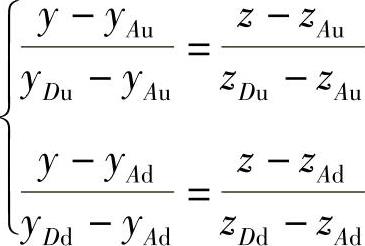
解此二方程,便可求出点C的坐标YC、ZC,因此有

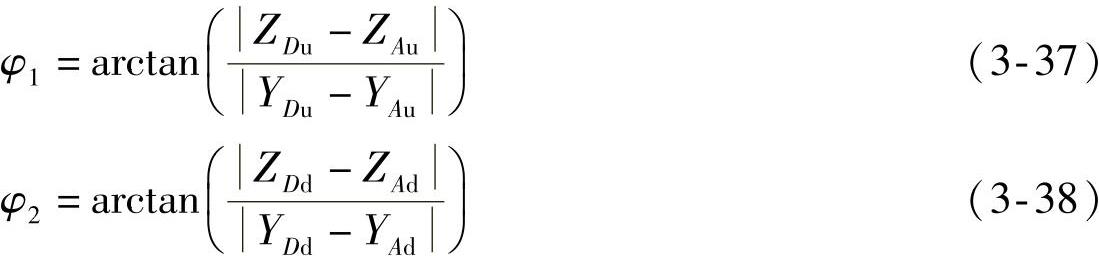
(2)摆臂角φ1、φ2
摆臂角可根据Au、Du、Ad、Dd四点的坐标由下列两式计算
(3)纵向悬架中心
纵向导向机构是由上臂销轴BuCu和下臂销轴BdCd构成,两销轴延线的交点Ce就是纵向悬架中心,如图3-20所示。至于纵向力矩中心,则需要前、后悬架配合导出,参见第二章。
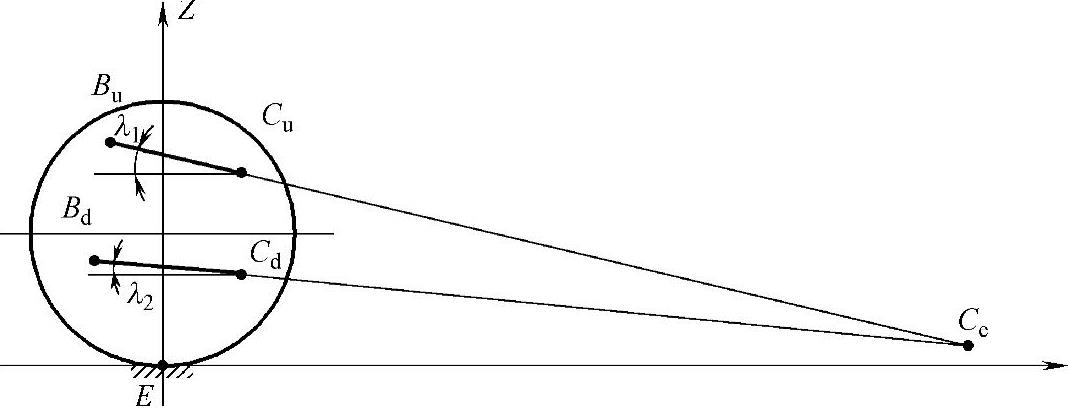
图3-20 纵向导向机构
(4)臂轴销角λ1、λ2
上臂轴销角λ1与下臂轴销角λ2可根据Bu、Cu、Bd、Cd四点的坐标,由式(3-39)和式(3-40)计算:


免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






