相关参数包括悬架中心、侧倾中心、枢轴偏角、摆臂仰角以及弹簧受力等问题,如图3-14所示。
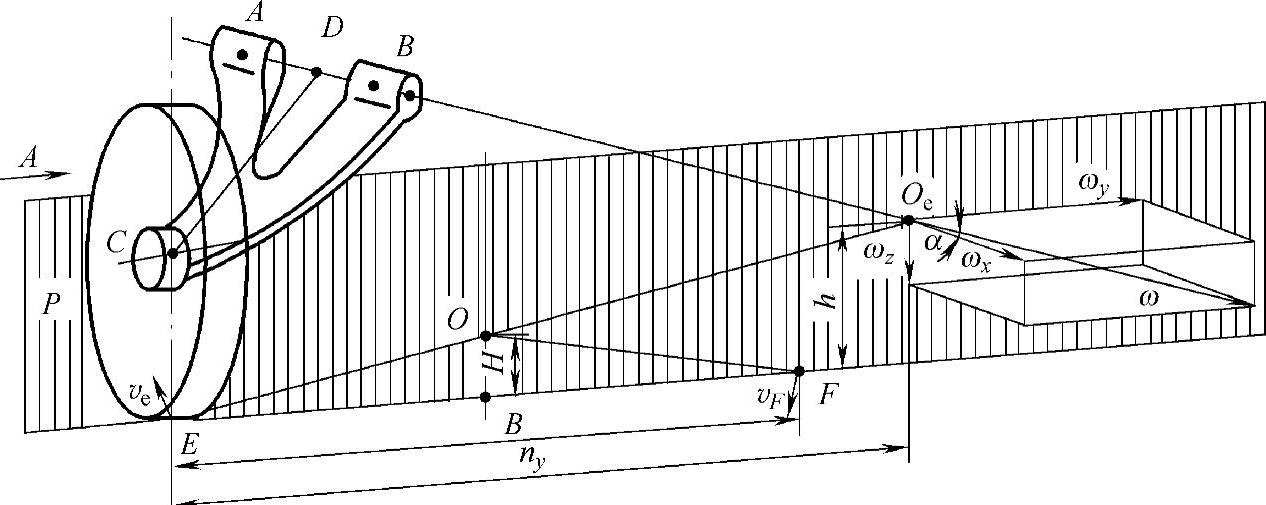
图3-14 半拖臂悬架的悬架中心、侧倾中心和枢轴偏角
1.悬架中心
所谓悬架中心,就是悬架(包括车轮总成)在满载状态下,相对于车身在横向平面(yz)内和纵向平面(xz)内的运动瞬心,也包括摆臂端点D。
(1)横向平面内的悬架中心
如图3-14所示,假设P平面、地平面和车身中心面的交点为坐标原点,其中P平面是过左右车轮着地中心E、F二点且垂直于地平面的平面。图中点Oe就是悬架的悬架中心。它是摆臂枢轴线(悬架轴线)在满载状态下,与P平面的交点。确定了点Oe的位置,就等于确定了侧倾中心点O。
之所以认定点Oe是悬架的悬架中心,是因为点Oe是摆臂枢轴线与P平面的交点,而摆臂枢轴线与摆臂相对于车身运动的角速度矢量ω的方向一致,如果在点Oe将ω按x、y、z三个坐标轴分解为ωx、ωy、ωz三个分量,那么只有ωx垂直于P平面。也就是说,Oe点相对于车身的由ωx引起的速度分量ve处于P平面内,故点Oe就是悬架(包括车轮总成)相对于车身运动的悬架中心。
为确定悬架中心点Oe的位置,只需确定点Oe的离地高度h和至车轮中心线的水平距离ny即可。令枢轴线上A、B两点的坐标分别为XA、YA、ZA和XB、YB、ZB,那么由图3-14的A向视图(xz平面)的几何关系可得

若h为负值,则说明点Oe钻入地下。
由图3-14所示(yz平面)的几何关系可得

式中 B——轮距。
(2)纵向平面内的悬架中心
由确定横向平面内的悬架中心Oe的过程,可以想象纵向平面(xz)的悬架中心Oe′,应该是在满载状态下摆臂枢轴线与Q平面的交点。Q平面是过点E沿x轴轴线方向且垂直于地平面的平面。确定了点Oe′,可为求取力矩中心等参数创造条件。
要确定点Oe′的位置,只需确定该点的x坐标nx和z坐标nz即可。由图3-14的顶视图(xy平面)的关系可得

由图3-14侧视图(xz平面)的几何关系可得

2.侧倾中心
侧倾中心O就是在满载状态下,左、右悬架或者地平面相对于车身的运动瞬心。在车身质心面与横向中性面重合的情况下,侧倾中心就是在P平面内,车轮着地中心E和悬架中心Oe的连线与车身中心线的交点。因此,O点的高度H为

3.枢轴偏角
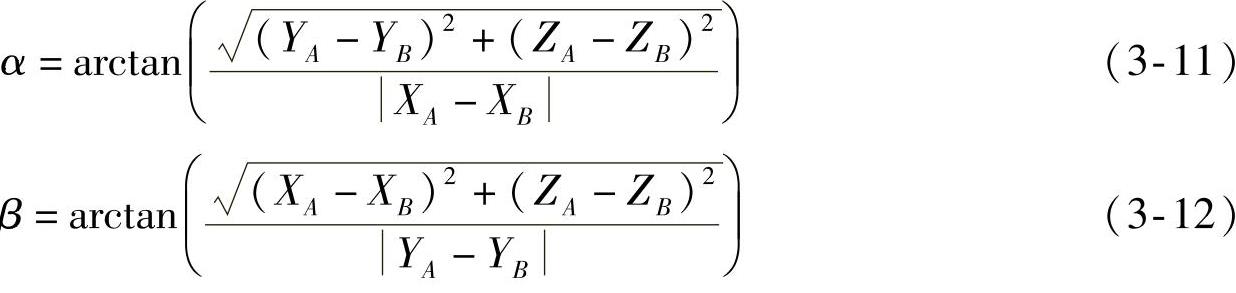
摆臂枢轴线的空间角度是半拖臂悬架的重要参数。它不仅影响悬架的刚度,而且还决定着整车的车身稳定性和操纵稳定性。枢轴线的空间角度是由枢轴线与X、Y、Z三个坐标轴线的夹角α、β和γ构成的。α、β和γ分别称为X、Y、Z三个方向的枢轴偏角。为计算刚度的需要,此处仅列出α(图3-14中角速度矢量ω与其分量ωx之间的夹角)和β(ω与ωy之间的夹角)的计算式为
 (www.daowen.com)
(www.daowen.com)
4.摆臂仰角
摆臂仰角系摆臂CD相对于地平面的夹角,也就是图3-15中的θ。要确定θ,必先确定摆臂端点D的Z坐标ZD,点D是过轮心C引枢轴线AB的垂线的垂足,如图3-15所示。
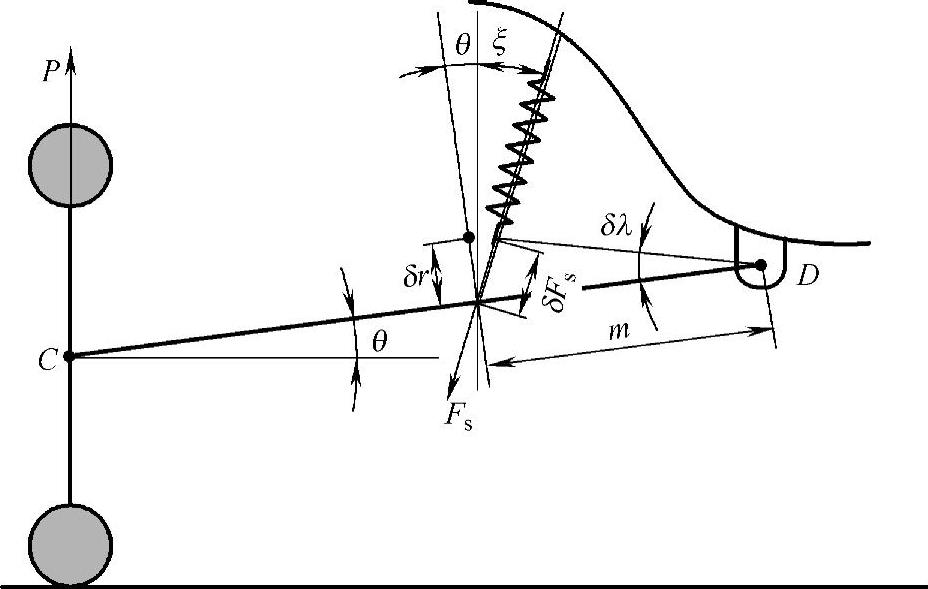
图3-15 半拖臂悬架的拖臂仰角
由于已知A、B、C三点的三维坐标,利用空间三角形△ABC的几何关系,可以求得△ABC垂足D(摆臂端点)的Z坐标为

式中 ∠A——空间△ABC的顶角。 为空间△ABC
为空间△ABC
的边长,其中
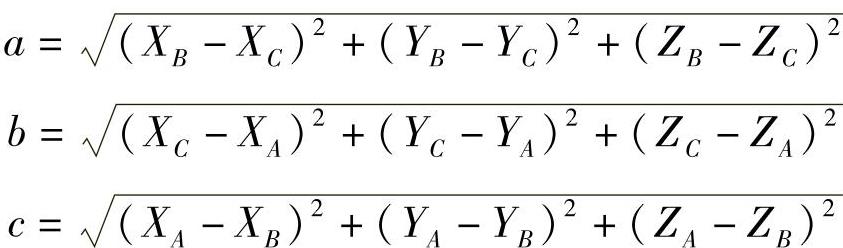
摆臂空间长度为

因此,由图3-15可得摆臂仰角为

摆臂的空间长度 在XY平面的投影长度,也就是杠杆n的长度为
在XY平面的投影长度,也就是杠杆n的长度为

5.弹簧受力
在已知车轮载荷P的情况下,可先求垂直于摆臂CD的力F,然后再求弹簧力Fs。根据图3-15的关系有

所以
由此可得弹簧受力为

即

式中 ξ——螺旋弹簧轴线与垂直平面的夹角。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






