“PL”(PLine多段线)的应用较广,可以绘制多种图形,这里列举了五种常用类型,很多图案的绘制要输入子命令,在执行命令过程中,选择合适的子项目,进行设置后才可以绘制不同样式的图形。
(1)命令行输入“PL”,确定,要求指定图形的点,任意给定几个点就可以得到如图4-2a所示。
(2)重复执行“PL”命令,任意给定第一点,然后输入“W”(Width),设置线的宽度。注意,一条线段有两个点,起点和终点,那么确定线的宽度就会有起点宽度和终点宽度,因而接着给定起点宽度比如100,确定,终点宽度也是100,确定,这样就可以继续给定任意几个点而得到如图4-2b所示。
提示1:
执行“PL”线设置参数时,需要先指定多段线的第一点后再输入对应的参数。这一点与矩形命令不同。
提示2:
在输入宽度的时候,可以输入数值确定宽度,也可以用鼠标在绘图区域连续单击两点来确定宽度。
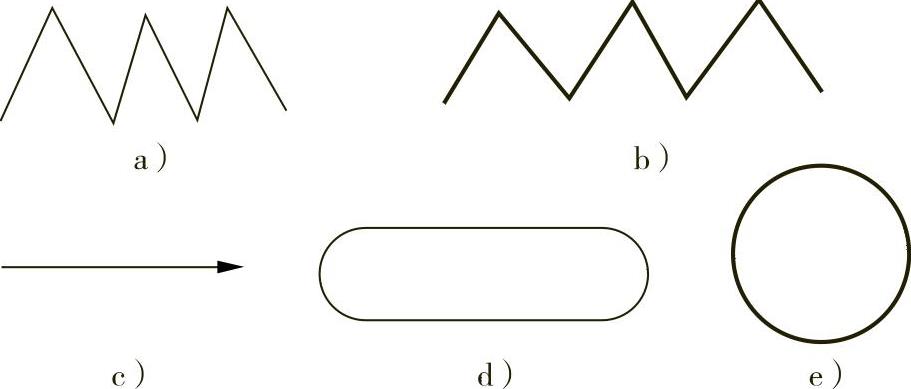
图4-2
【命令步骤】
命令:PL
PLINE
指定起点: (单击任意点)
当前线宽为0.0000
指定下一个点或[圆弧(A)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入W)
指定起点宽度<0.0000>: (输入100)
指定端点宽度<100.0000>: (按〈Enter〉键确定也是100)
指定下一个点或[圆弧(A)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (单击下一个任意点)
(3)重复执行“PL”命令,任意给定第一点,输入“W”,确定,更改线宽为0,确定,打开正交模式,指定下一点输入3000,然后再输入“W”,确定,设置宽度,起点宽度输入0,确定,端点宽度为300,确定,然后向起点方向指定另外一点输入600,形成如图4-2c所示的箭头样式,确定。注意此时要保证在正交模式打开的情况下绘制图形。
提示:
“PL”多段线绘制箭头时,也可以设置起点宽度为300,结束点宽度为0,只是在绘制线的方向上有所不同。
【命令步骤】
命令:PL
PLINE
指定起点: (单击任意点)
当前线宽为100.0000
指定下一个点或[圆弧(A)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入W)
指定起点宽度<100.0000>: (输入0)(www.daowen.com)
指定端点宽度<0.0000>: (按〈Enter〉键确认也是0)
指定下一个点或[圆弧(A)/半宽(H)/长度(L)/放弃(U)/宽度(W)]:<正交开> (输入3000)
指定下一点或[圆弧(A)/闭合(C)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入W)
指定起点宽度<0.0000>: (按〈Enter〉键默认0)
指定端点宽度<0.0000>: (输入300)
指定下一点或[圆弧(A)/闭合(C)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入600)
(4)重复执行“PL”命令,任意给定第一点,输入“W”,更改线宽为0,确定,指定第二点输入3000,再输入“A”(Arc圆弧),确定,此时多段线成为圆弧段,指定圆弧的下一点输入(@0,-1000),然后再输入“L”(Line),确定,指定下一点输入3000,绘制直线段,再次输入“A”圆弧命令,捕捉起点作为圆弧的结束点,按〈Enter〉键结束得到如图4-2d所示。
【命令步骤】
命令:PL
PLINE
指定起点: (单击任意点)
当前线宽为300.0000
指定下一个点或[圆弧(A)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入W)
指定起点宽度<300.0000>: (输入0)
指定端点宽度<0.0000>: (按〈Enter〉键确认也是0)
指定下一个点或[圆弧(A)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入3000)
指定下一点或[圆弧(A)/闭合(C)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入A)
指定圆弧的端点或
[角度(A)/圆心(CE)/闭合(CL)/方向(D)/半宽(H)/直线(L)/半径(R)/第二个点(S)/放弃(U)/宽度(W)]: (输入@0,-1000)
指定圆弧的端点或
[角度(A)/圆心(CE)/闭合(CL)/方向(D)/半宽(H)/直线(L)/半径(R)/第二个点(S)/放弃(U)/宽度(W)]: (输入L)
指定下一点或[圆弧(A)/闭合(C)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入3000)
指定下一点或[圆弧(A)/闭合(C)/半宽(H)/长度(L)/放弃(U)/宽度(W)]: (输入A)
指定圆弧的端点或
[角度(A)/圆心(CE)/闭合(CL)/方向(D)/半宽(H)/直线(L)/半径(R)/第二个点(S)/放弃(U)/宽度(W)]: (捕捉起点)
(5)重复执行“PL”命令,任意给定第一点,输入“W”,确定,更改线宽为100,确定,指定起点,然后输入“A”,确定,给定圆弧终点输入(@0,-2000),然后捕捉起点,确定。这样就可以得到如图4-2e所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




