奥迪的Multitronic变速器是在原有无级变速器的基础上安装了多片式链带的传动组件,这种组件大大拓展了无级变速器的使用范围,能够传递和控制峰值高达280N·m的动力输出,其传动比超过了以前各种自动变速器的极限值。该变速器耗能少、反应更快。从车辆的整体性能来看,装有Multitronic变速器的奥迪A62.8L轿车的0~100km/h加速时间比同级普通自动变速器车型快了1.3s,百公里油耗降低了0.9L。Multitronic变速器还采用了全新的电子控制系统,以克服原有无级变速器的不足。在上、下坡时,系统能自动探测坡度,并通过调整传动比增加动力输出或加大发动机的制动转矩来协助车辆行驶。相对于传统的自动变速器,Multitronic变速器具有更高的灵活性,在增加或删除变速模式的时候,只需要更改电脑程序即可改变齿轮的比数和半径,因此可以和多台不同类型不同输出特性的发动机配合使用。
Multitronic R代表奥迪公司的无级自动变速器,01J代表无级自动变速器型号,CHL、CHJ是无级自动变速器代码,2003年以后带有S位(S模式就是一个动力模式,当变速杆选择S位时,变速器传动比转换延迟,同时发动机转速相对高于D位模式,但充分实现了发动机的加速性能)。
奥迪01J型无级变速器主要由减振器缓冲装置、动力装置、速比调节变换器、液压控制单元、电控单元组成,如图5-7所示,零部件如图5-8所示。
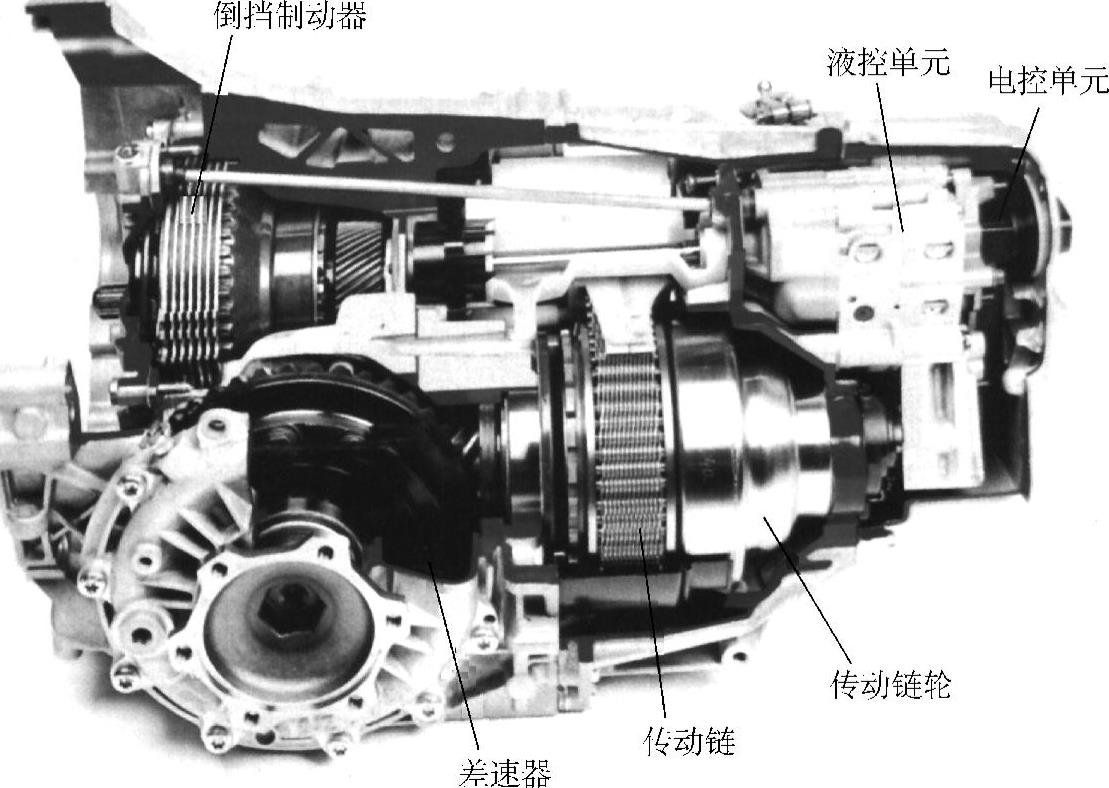
图5-7 01J型CVT结构图
1.各系统的作用
(1)飞轮减振装置 在往复式内燃机中,不均匀的燃烧会引起曲轴扭振,扭振传递到变速器中会引起共振,同时会产生噪声并容易使变速器部件过载,飞轮减振装置和双质量飞轮可减缓发动机与变速器之间因动力连接而产生的扭振,并保证发动机无噪声运转。奥迪V6 2.8L发动机转矩通过飞轮减振装置(图5-9)传递到变速器。四缸发动机比六缸发动机具有更大的不均匀性,所以在四缸发动机上使用了双质量飞轮,图5-10所示为奥迪A41.8L四缸发动机双质量飞轮,在怠速区内发动机产生振动,通过刚性连接变速器吸收振动。
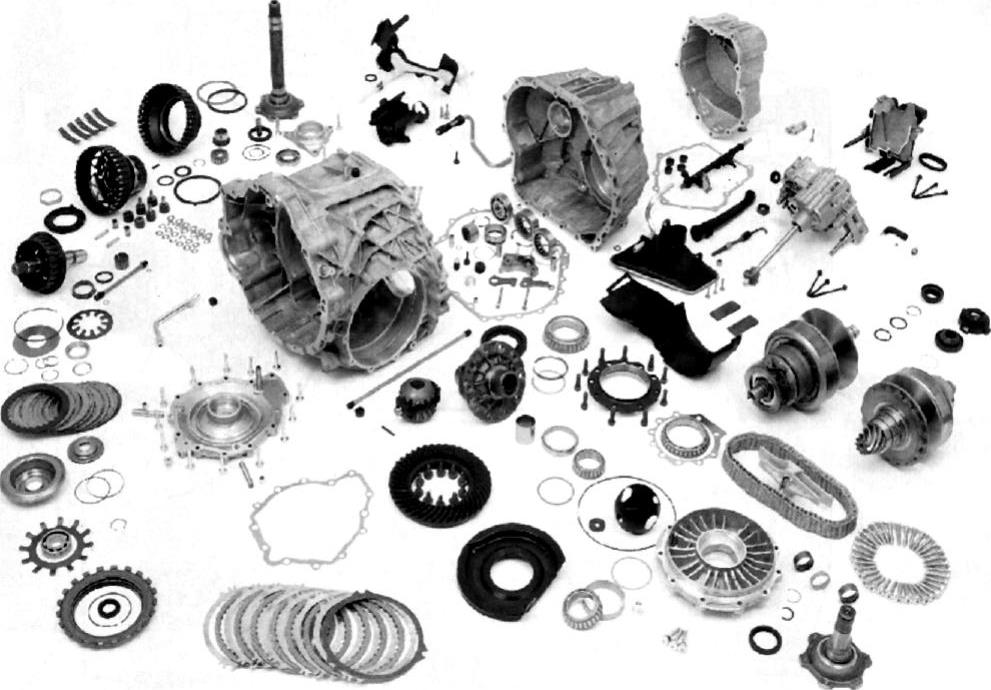
图5-8 01J型CVT零件图
(2)行星轮系的结构 在奥迪01J型无级变速器中行星轮装置为反向齿轮装置,如图5-11所示,其功能是倒挡时改变变速器输出轴的旋转方向。
前进挡时行星轮系的传动比为1∶1,作为输入元件的太阳轮与输入轴和前进挡离合器钢片相连接,作为输出元件的行星架与辅助减速挡齿轮组的主动齿轮和前进挡离合器摩擦片相连接,内齿圈和倒挡制动器摩擦片相连接,倒挡制动器钢片和变速器壳体相连接,如图5-12所示。
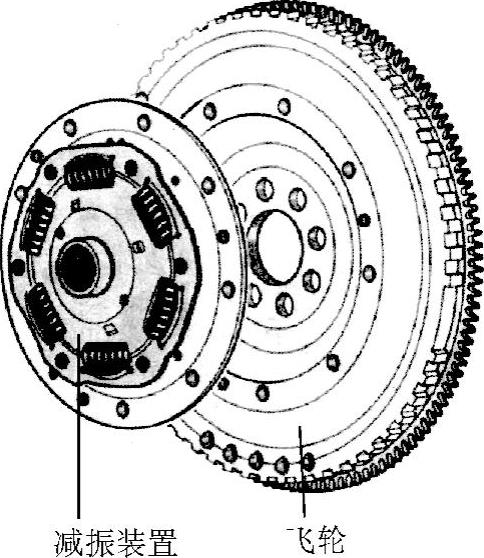
图5-9 飞轮减振装置
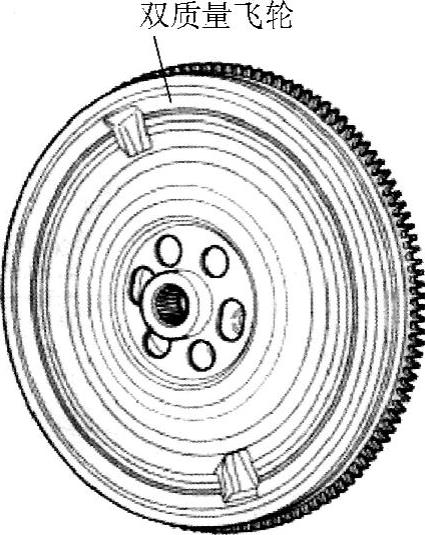
图5-10 双质量飞轮
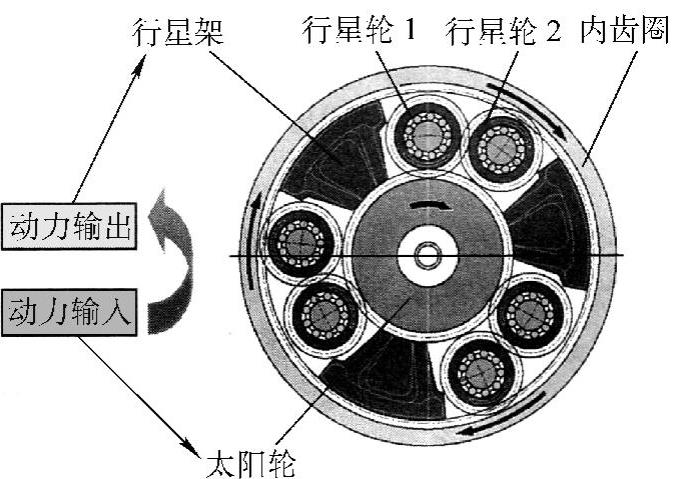
图5-11 行星轮结构
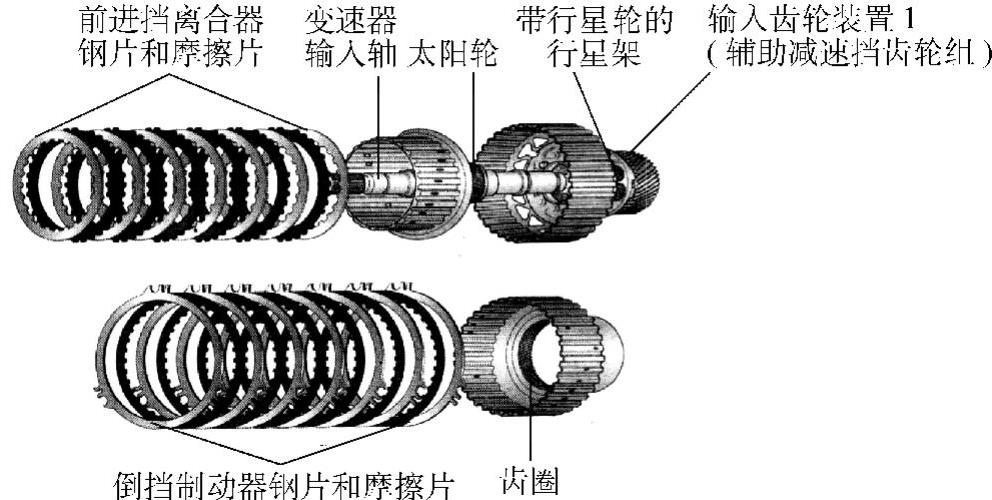
图5-12 前进挡离合器和倒挡制动器
奥迪01J型无级变速器行星轮系前进挡和倒挡的工作状态如图5-13所示。
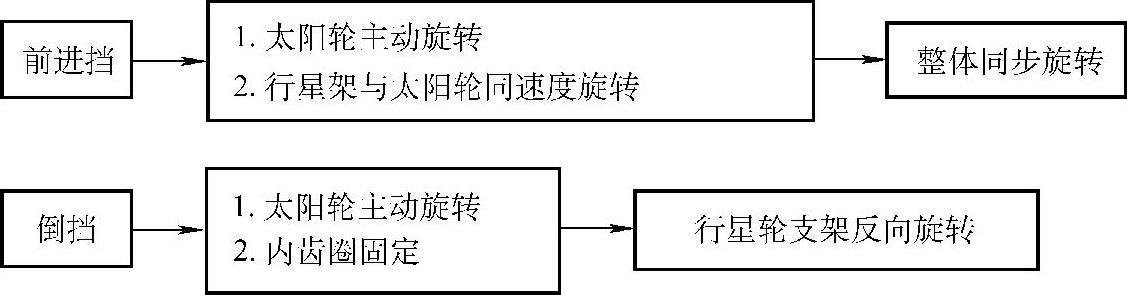
图5-13 奥迪01J型无级变速器行星轮系前进挡和倒挡的工作状态
(3)P/N位时行星轮系的传动路线 如图5-14所示发动机的转矩通过输入轴相连接的太阳轮传递到行星轮系并驱动行星轮1,行星轮1再驱动行星轮2,行星轮2与内齿圈相啮合。车辆尚未行驶时作为辅助减速挡输入部分的行星架(行星轮系的输出部分)是静止的,内齿圈以发动机转速一半的速度怠速运转,旋转方向与发动机相同。
(4)前进挡的传动路线 如图5-15所示前进挡离合器钢片与太阳轮相连接,摩擦片与行星架相连接。当前进挡离合器工作时,太阳轮(变速器输入轴)与行星架(输出)相连接,行星轮系锁死,并与发动机运转方向相同,传动比1∶1。
(5)倒挡的传动路线 如图5-16所示倒挡制动器摩擦片与内齿圈相连接,钢片与变速器壳体相连接。当倒挡制动器工作时,内齿圈固定,太阳轮(输入轴)为主动元件,转矩传递到行星架,由于是双行星轮(其中一个为惰轮),所以行星架就会以与发动机旋转方向相反的方向运转,车辆向后行驶。
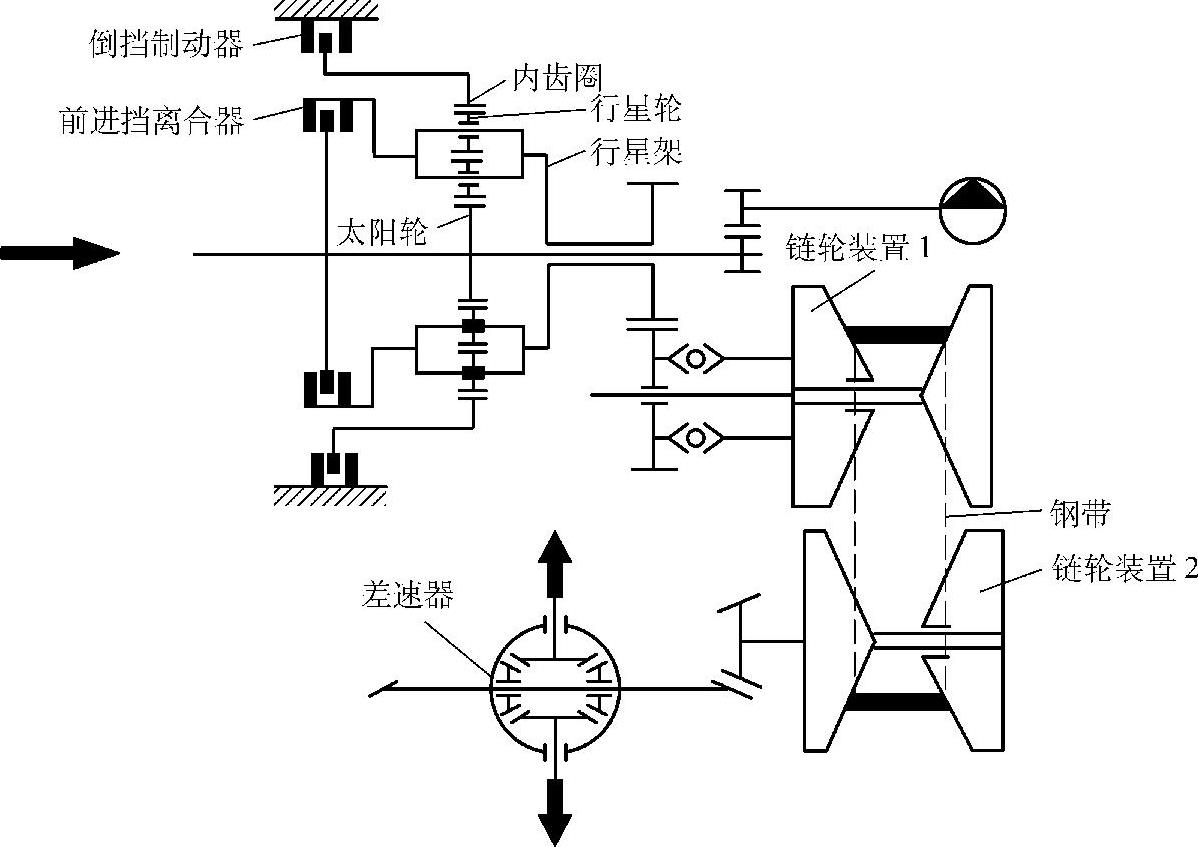
图5-14 P/N位动力流程简图
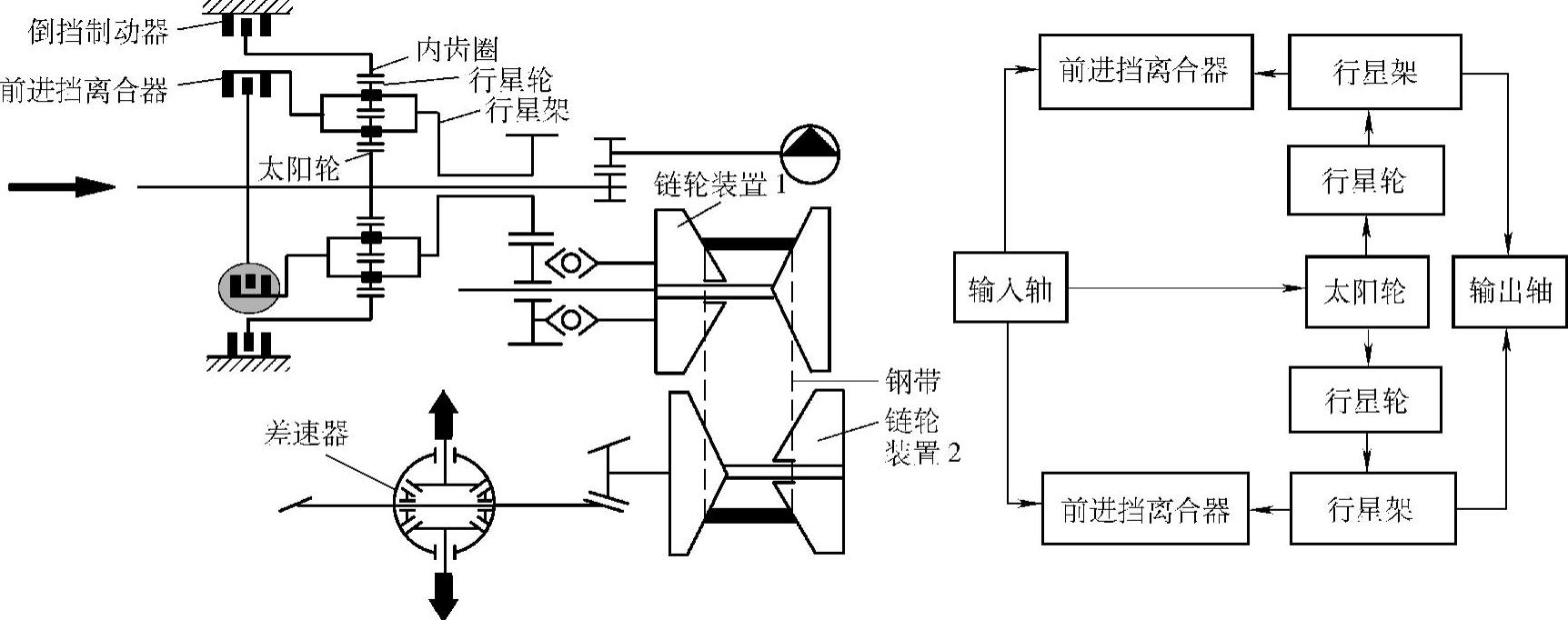
图5-15 前进挡动力流程简图
由于受空间限制,转矩通过辅助减速挡齿轮组(图5-17)传递到变速器。辅助减速挡齿轮组有不同齿数的传动比以适应发动机到变速器的变化,从而使变速器在其最佳转矩范围内工作。
(6)前进挡离合器/倒挡制动器 奥迪01 J型无级变速器的起动装置是前进挡离合器和倒挡制动器(图5-18),并配合使用反向行星架机构来实现前进挡和倒挡,它们只用作起动装置并不改变速比,而在液压或电控有级式自动变速器里它们的功能是实现各挡传动比。其特点为:重量轻、安装空间小、起动特性适应驾驶状态、爬行转矩适应驾驶状态、在过载或非正常使用情况下具有保护功能。起步和转矩传递过程由电子-液压控制单元监控和调整。
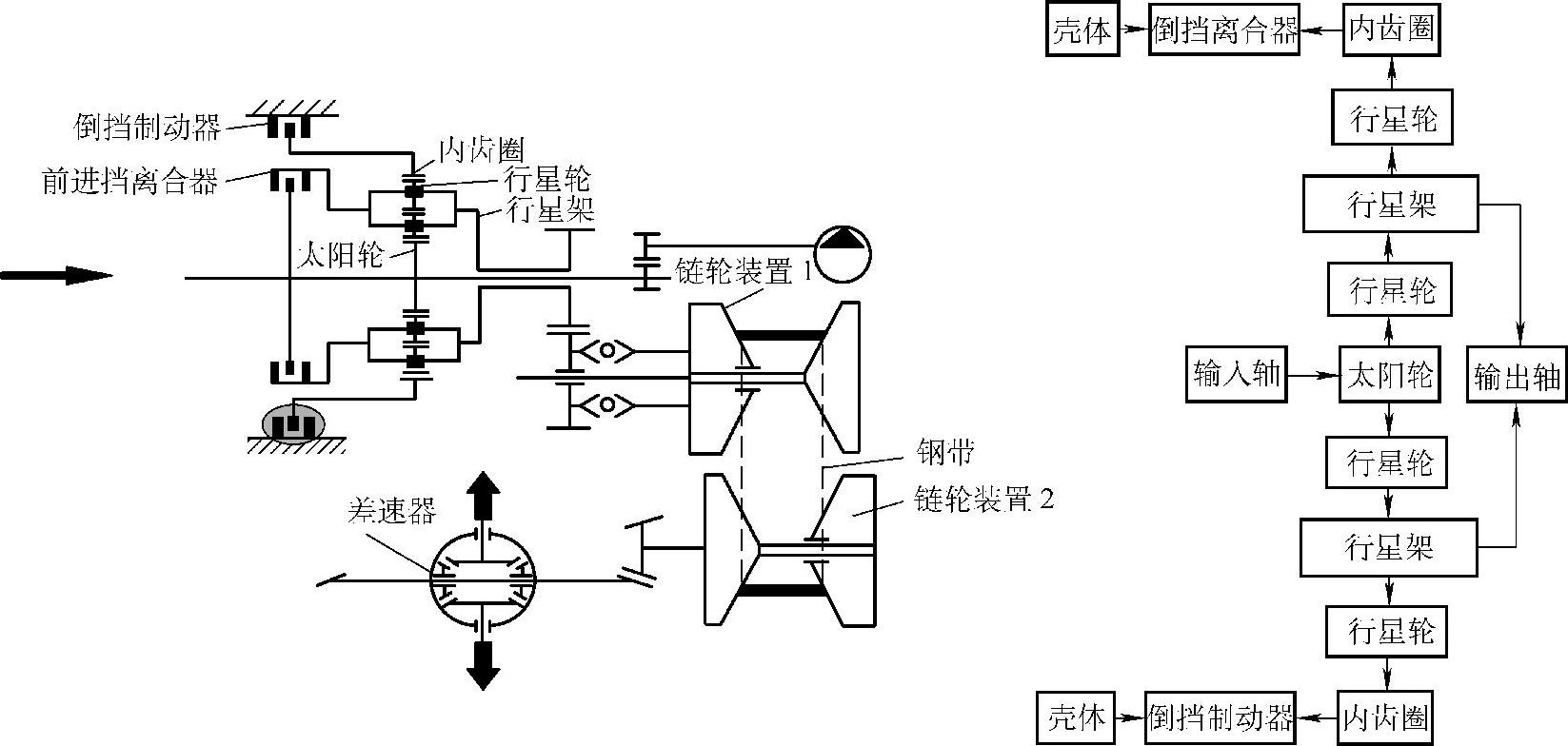
图5-16 倒挡动力流程简图
1)离合器液压控制。离合器压力与发动机转矩成正比,与系统压力无关。液压控制阀体中的VSTV(输导压力阀)始终为N215(压力调节电磁阀)提供一个常压。根据变速器控制单元计算的控制电流值,N215就会调节出一个控制压力,该压力的大小决定KSV(离合器控制阀)的位置。
KSV控制离合器的压力,同时也调整待传递的发动机转矩。KSV的压力由系统压力提供,KSV根据N215的触发信号(电流的大小)产生离合器的控制压力,高控制压力产生高离合器压力。离合器压力通过SIV(安全阀)传递到HS(手动换挡阀),HS的位置改变就会将转矩传递到前进挡离合器(D位)或倒挡制动器(R位)。当变速杆位于P和N位时,HS切断供油,前进挡离合器和倒挡制动器的油路都与油底壳相通。离合器的液压控制如图5-19所示。
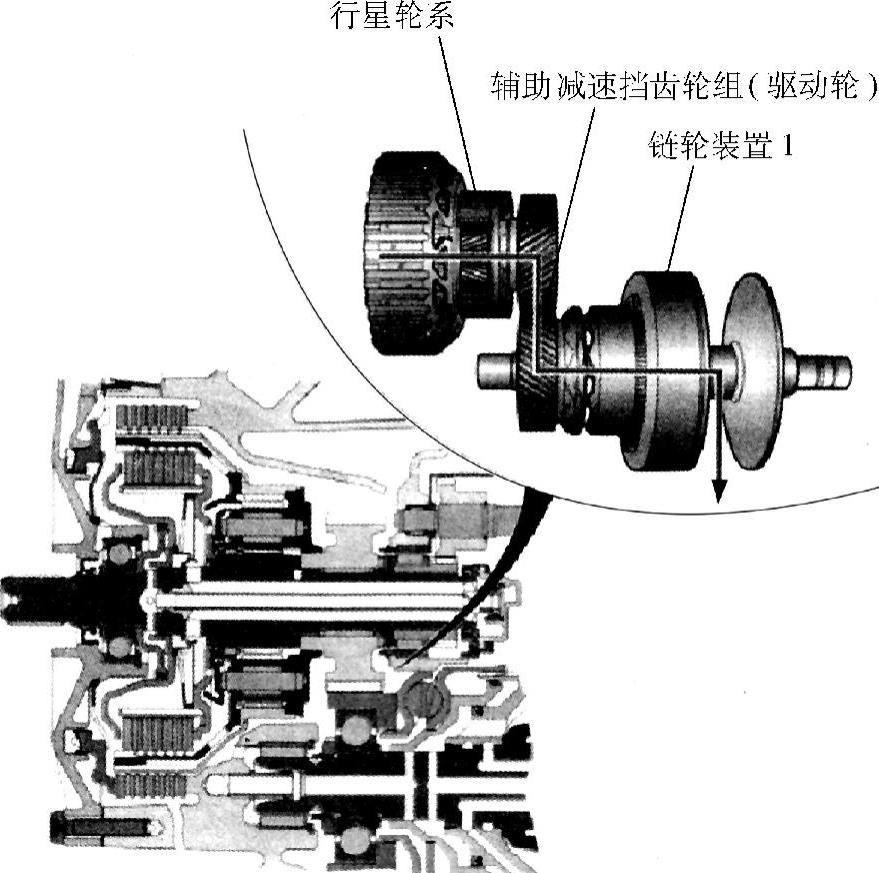
图5-17 辅助减速挡齿轮组
离合器的液压控制流程如图5-20所示。
2)离合器系统保护。离合器系统保护包括防止离合器油压太高的安全切断和防止离合器传递转矩负荷过高的过载保护。当G193(压力传感器)检测到离合器实际压力明显高于电脑所计算出的离合器额定压力时,变速器就会进入安全紧急故障状态。在这种情况下,无论手动换挡阀处于任何位置以及其他系统状态如何,离合器压力都会泄掉。这种安全切断是由SIV来实现的,以确保离合器快速分离,SIV是由N88(压力调节电磁阀)激活的。当离合器控制压力上升到约0.4MPa时,到KSV的供油被切断,油底壳与手动阀的连接通道被打开。离合器安全保护控制如图5-21所示。
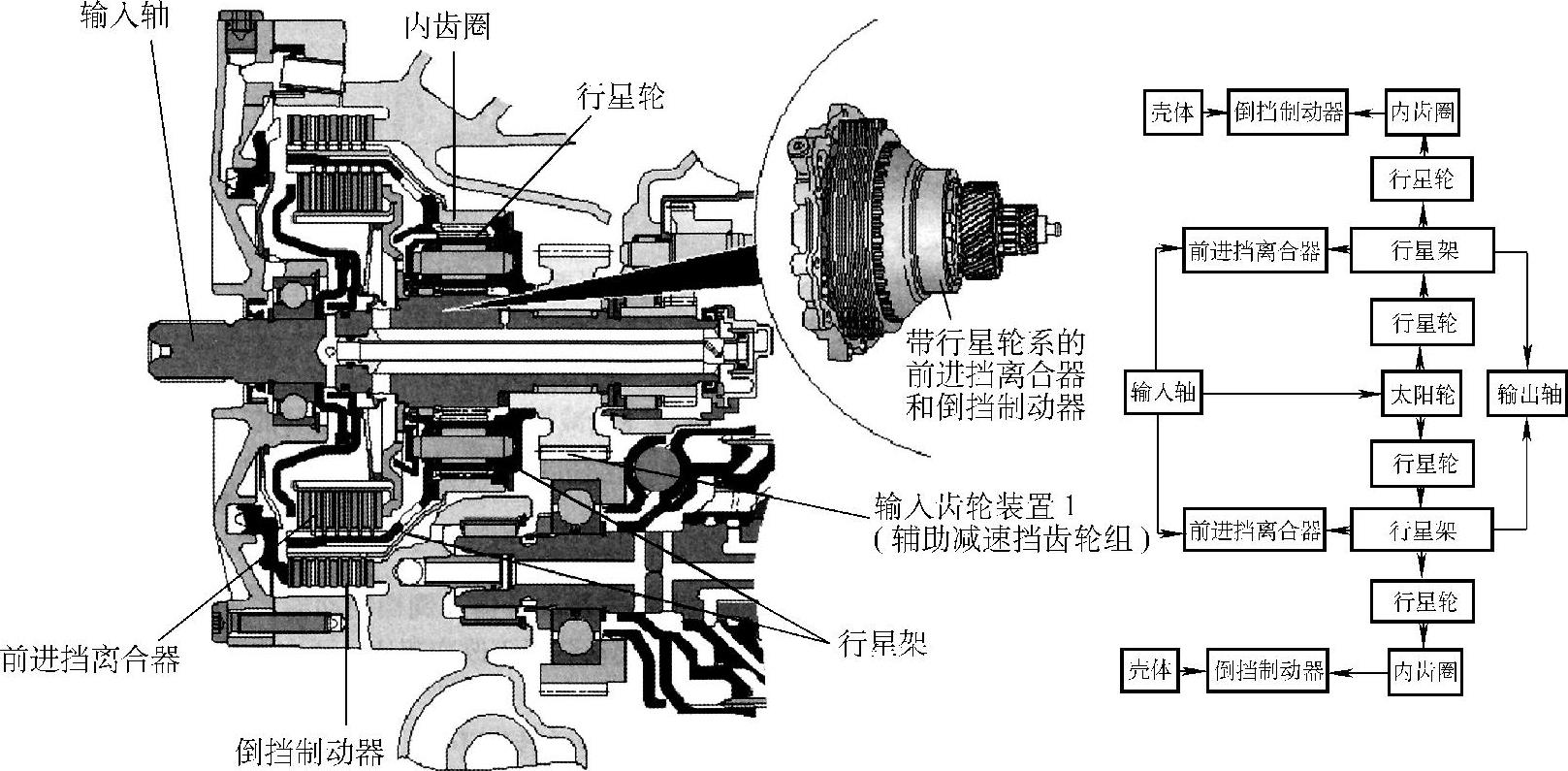
图5-18 前进挡离合器/倒挡制动器及行星轮装置
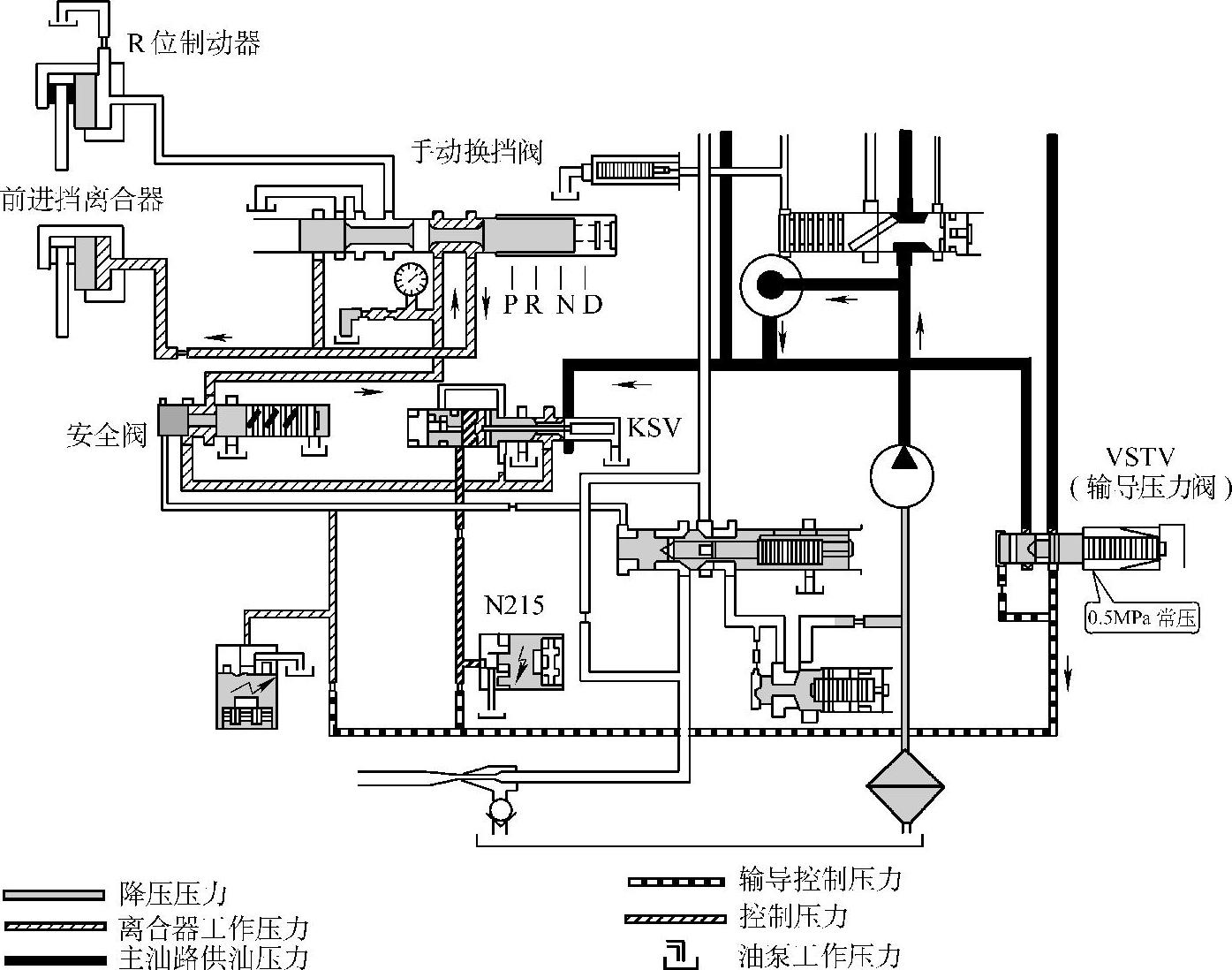
图5-19 离合器液压控制
安全阀:SIV 离合器控制阀:KSV 输导压力阀:VSTV 手动换挡阀:HS 离合器压力调节电磁阀:N215
根据变速器实际工作状态,变速器控制单元计算出离合器打滑温度、发动机转矩以及变速器油温,当控制单元通过油温传感器测得离合器温度因离合器过载而超出标定值时,发动机转矩将减小。减小发动机转矩的目的是降低离合器的工作温度,因此为了防止过热,离合器需要冷却。离合器过载几乎不会出现,只有在发动机转矩减小到怠速转速上限时才可能发生,离合器过载保护控制如图5-22所示。
3)离合器冷却系统
①为了保护离合器不经常工作在高温状态下,离合器由单独的冷却液流来冷却(特别是在恶劣路况下行驶时)。为减少离合器冷却时的动力损失,冷却液流由集成在阀体上的冷却液控制单元在需要时接通。冷却液量通过吸气喷射泵来增加,而不必对油泵的容量有过高的要求。为了优化离合器冷却性能,冷却液仅传递到链轮装置中。前进挡离合器的冷却液和压力油通过变速器输入轴的中间孔道流通,两条油路由内部负管彼此分开。变速器输入轴出油孔上安有润滑油分配器,将润滑油引导到前进挡离合器或倒挡制动器。离合器冷却系统如图5-23所示。
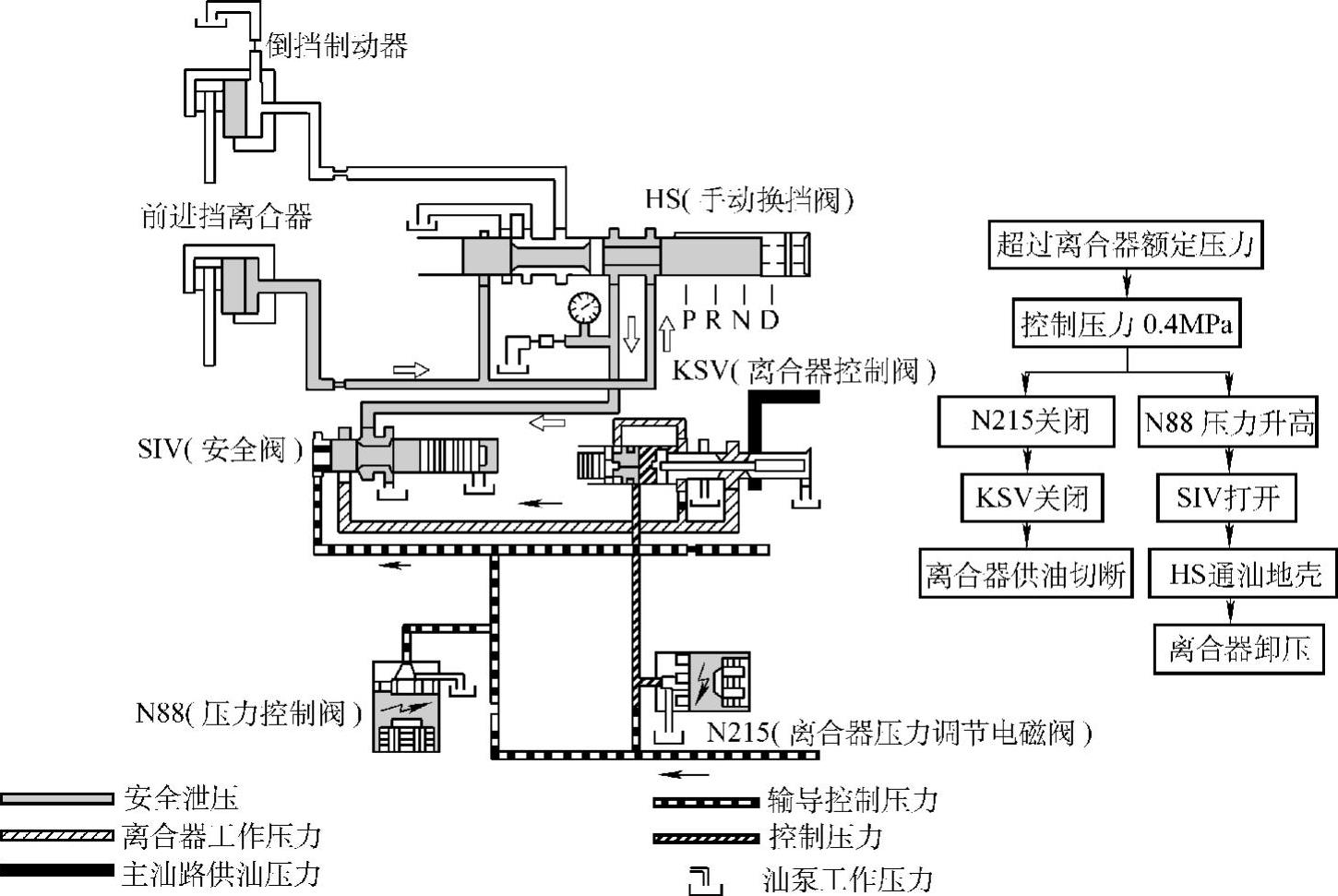
图5-21 离合器安全保护控制
②冷却倒挡制动器。若前进挡离合器不工作,发动机怠速运转或倒挡制动器工作时,润滑油分配器回到其初始位置。这种情况下,冷却油流到润滑油分配器后通过分配器盘流回到倒挡制动器,分配器带轮油道内的部分润滑油流到行星轮系,为其提供必要的润滑。
③冷却前进挡离合器。若前进挡离合器接合,离合器在过载或非正常使用情况下,具有保护功能的缸筒(压盘)将润滑油分配器压回。在此位置,冷却液流经润滑油分配器前端
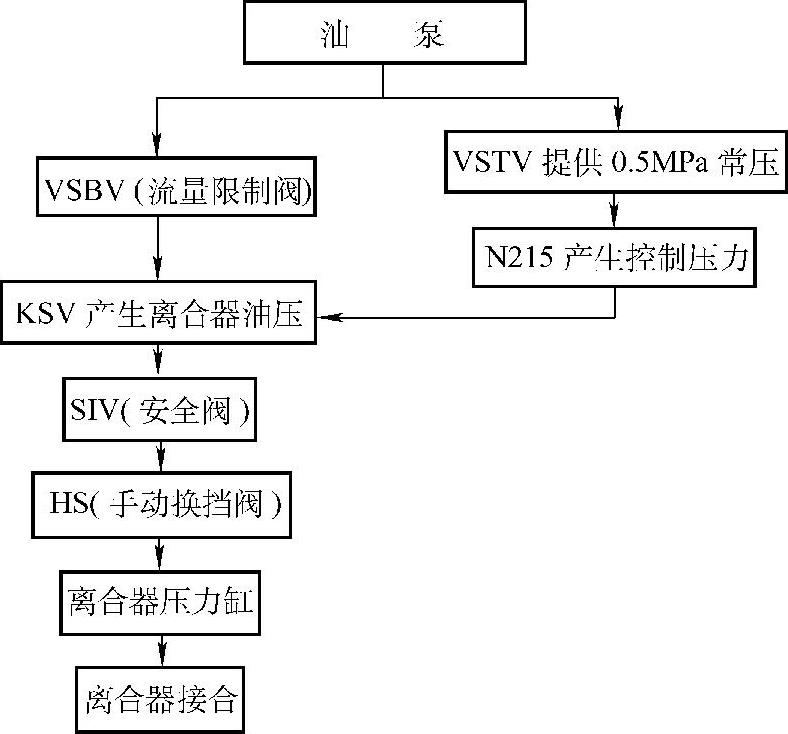
图5-20 离合器液压控制流程
而流入前进挡离合器,如图5-24所示。
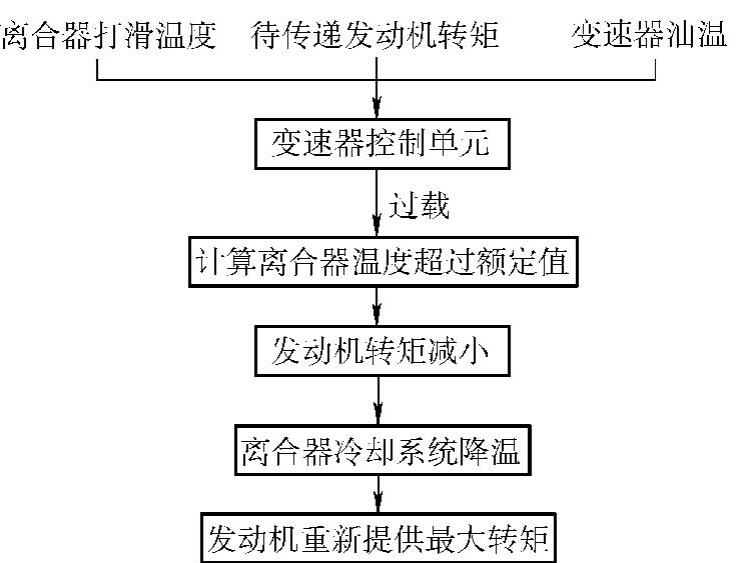
图5-22 离合器过载保护控制
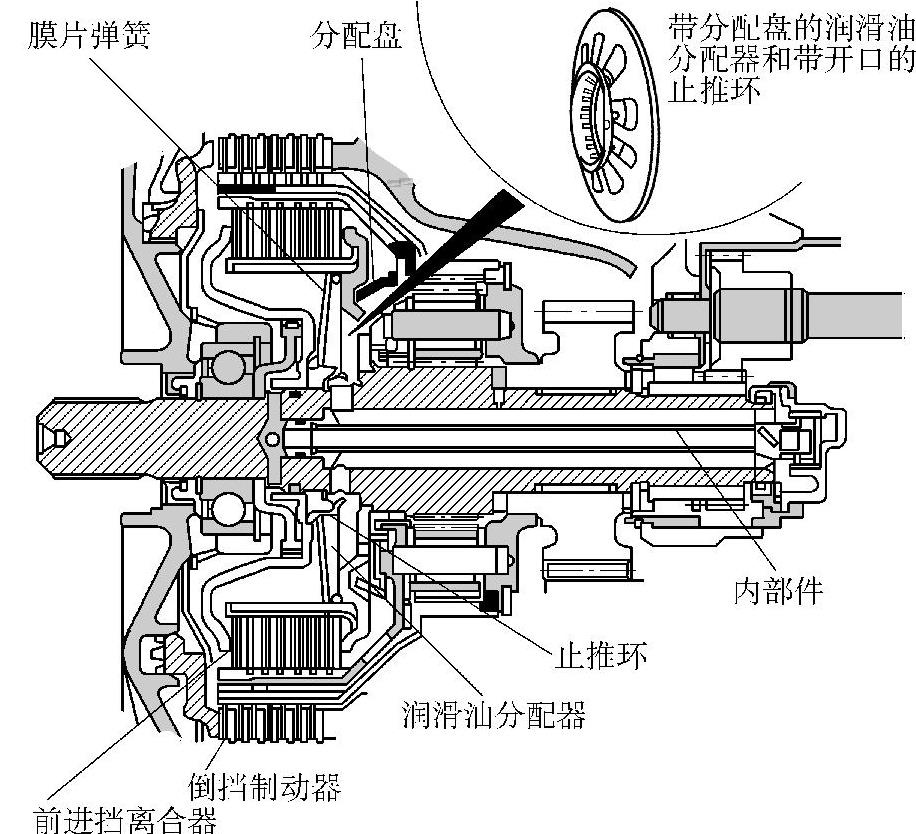
图5-23 离合器冷却系统
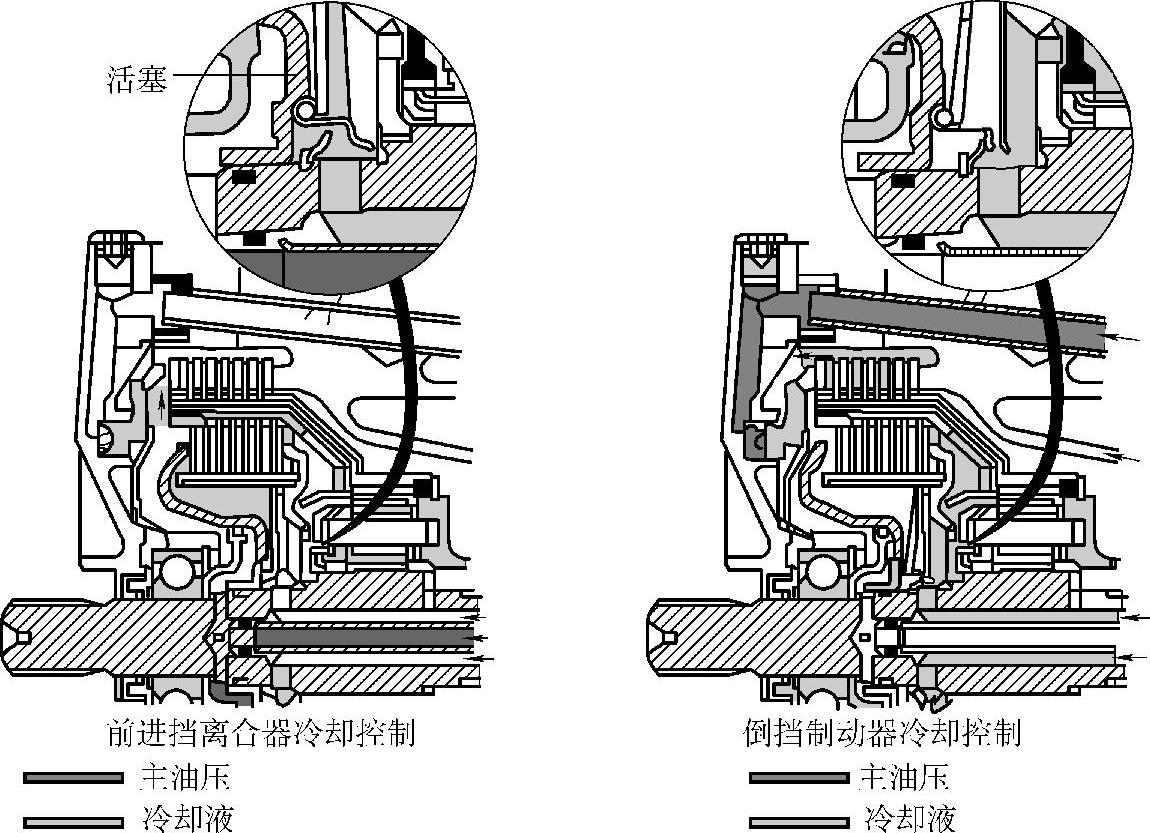
图5-24 前进挡和倒挡冷却控制
④离合器冷却控制。当变速器控制单元通过油温传感器监测到离合器温度过高信号时,离合器冷却系统接通。变速器控制单元向N88提供一个额定电流,该电流产生一个控制压力,控制压力控制KKV(离合器冷却阀),KKV将压力从冷却回油管传到吸气喷射泵,如图5-25所示。
⑤离合器控制。离合器控制包括起动过程控制、电子控制、爬行控制和控制匹配。起动过程中发动机转速主要用于离合器的控制。根据起动特性,变速器控制单元识别出发动机的标定转速,并通过离合器转矩功能来调整发动机转速。离合器起动过程控制如图5-26所示。
变速器控制单元通过发动机转速、变速器输入转速、加速踏板位置、发动机转矩、制动力、变速器油温等参数经逻辑分析后计算出离合器的额定压力,并且确定N215(压力调节电磁阀)的控制电流,从而确定离合器的压力,离合器传递发动机转矩也相应地随控制电流的变化而变化。G193检测液压控制系统中离合器或制动器的实际压力,实际压力与变速器控制单元计算出的额定压力不断进行比较(实际压力与额定压力通过模糊理论被持续监控),若两者差值超过一定范围,便会进行修正。离合器电子控制如图5-27所示。
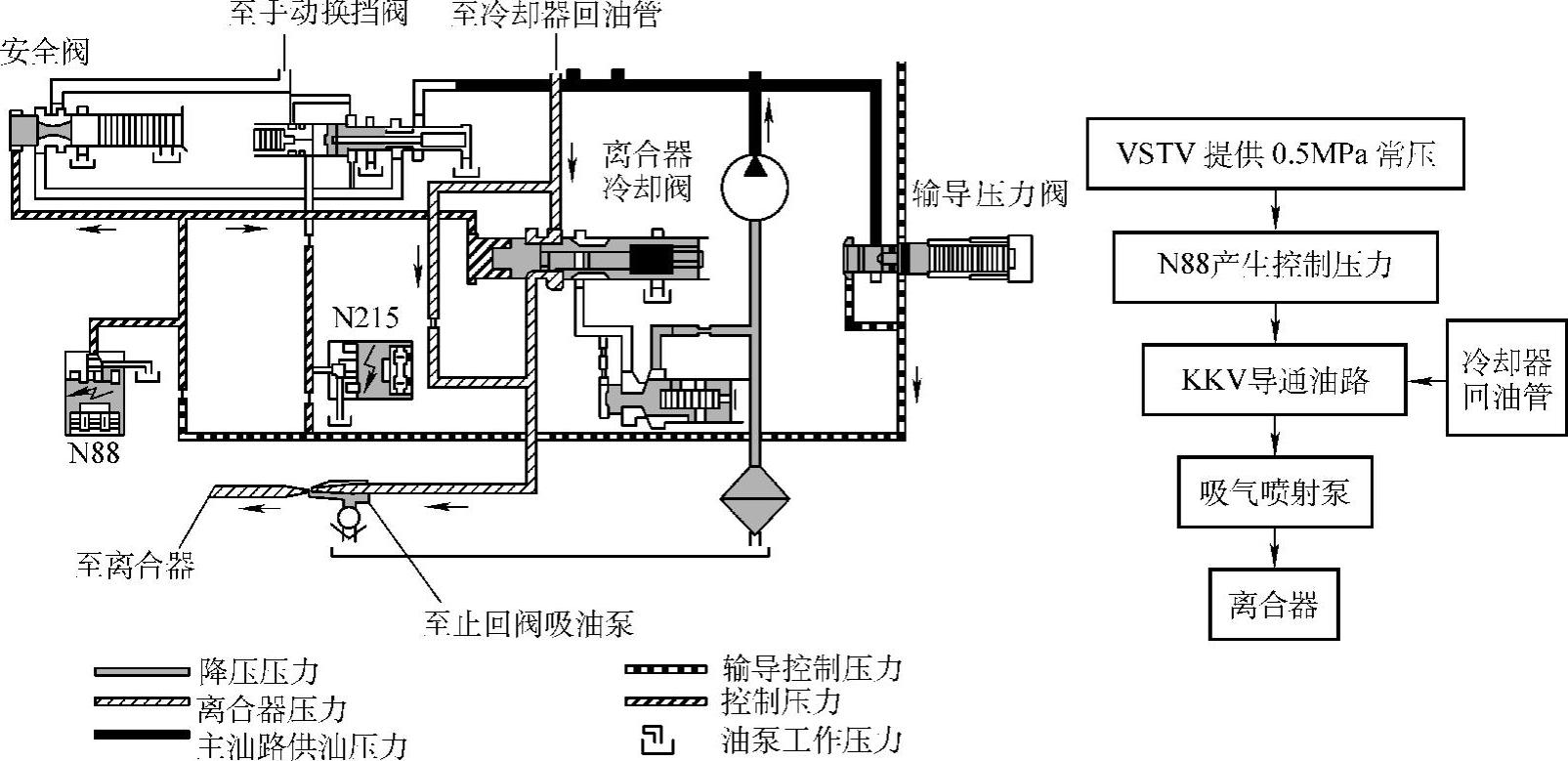
图5-25 液压离合器冷却控制
SIV:安全阀 KKV:离合器冷却阀 VSTV:输导压力阀 N88:压力控制阀 N215:离合器压力调节电磁阀
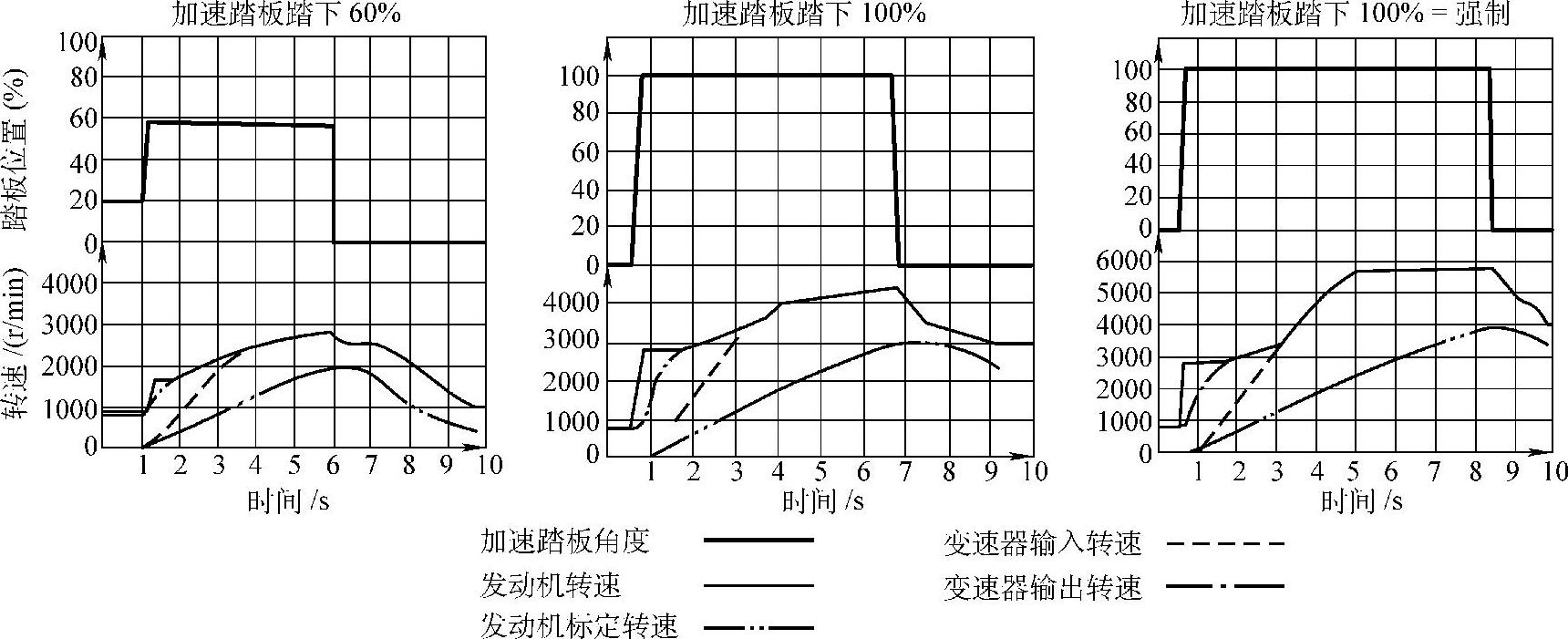
图5-26 离合器起动过程控制
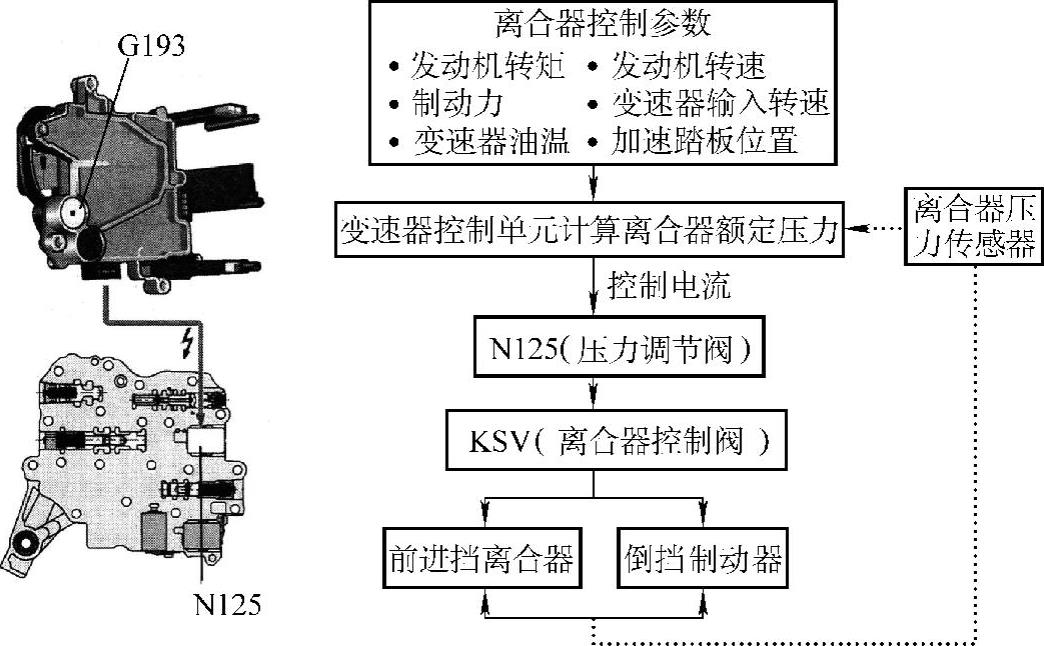
图5-27 离合器电子控制(https://www.daowen.com)
当选择前进挡发动机怠速运转时,爬行控制功能将离合器设定到一个额定的打滑转矩(离合器转矩)。离合器爬行控制的意义在于:当车辆处于静止状态选择前进挡时,爬行控制允许不踩加速踏板,而使车辆缓慢移动,因此增强了驾驶的舒适性;当车辆停于坡路上,制动力不足,车辆回溜时,离合器压力将增大,使汽车停住(坡路制动功能),因此提高了驾驶的安全性;在爬行控制模式下,实现了离合器控制匹配,优化了离合器控制。
在任何工作状态下,系统均需提供精确的离合器压力以保证离合器传递转矩。
F=N×μ
式中,F是离合器摩擦力(离合器传递转矩);N是离合器压力;μ是摩擦系数随变速器油(质量、老化、损耗)、变速器温度、离合器温度和离合器打滑等状况的变化而变化。
为了使任何工作状态下和其寿命期内离合器控制的舒适性保持不变,压力调节电磁阀N215的控制电流和离合器转矩之间的关系必须不断优化。离合器控制匹配如图5-28所示。
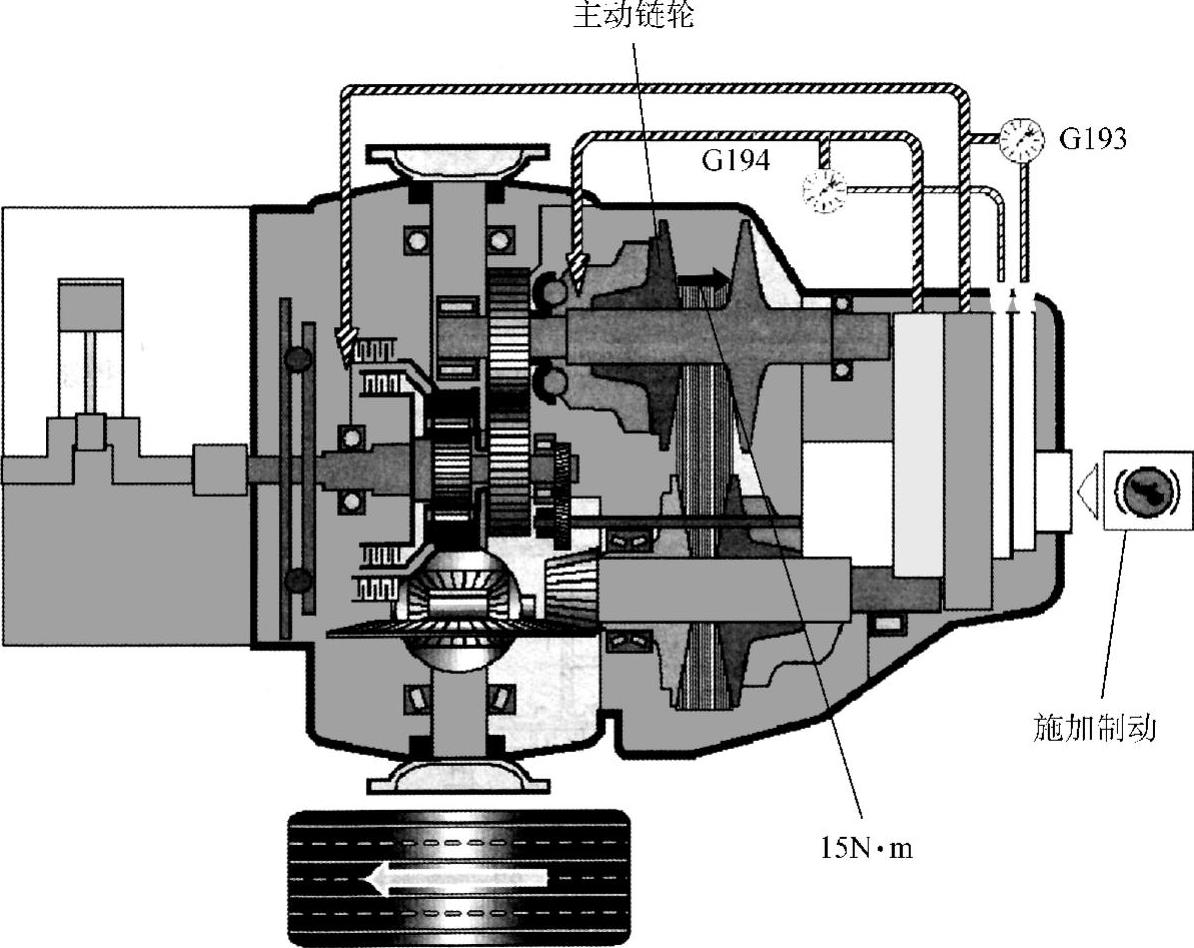
图5-28 离合器控制匹配
为了补偿离合器不同工作状态的影响和优化离合器控制,在爬坡控制模式和部分负荷状态下,压力调节电磁阀N215的控制电流和离合器的转矩相互匹配。在爬坡模式中(施加制动)有一额定的离合器转矩,变速器控制单元监测控制来自压力调节电磁阀N215和来自压力传感器G194的数据(接触压力)之间的关系,并将这些数据存储起来。实际数据用于计算新的特性参数。离合器爬坡模式下的控制匹配如图5-29所示。
离合器部分负荷状态下的控制匹配如图5-30所示。
离合器微量打滑控制曲线图如图5-31所示,微量打滑指打滑率为4~20r/min,因打滑率小,离合器片不会烧蚀,也不影响燃油经济性。
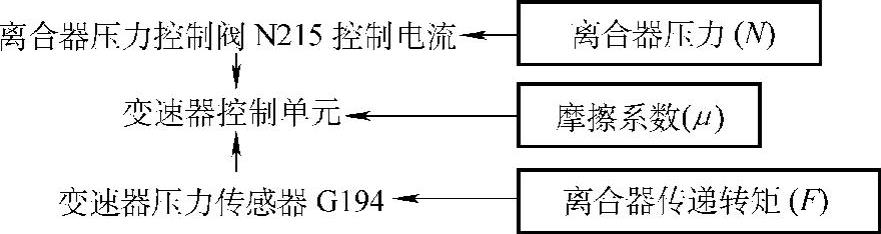
图5-29 离合器爬坡模式下的控制匹配

图5-30 离合器部分负荷状态下的控制匹配
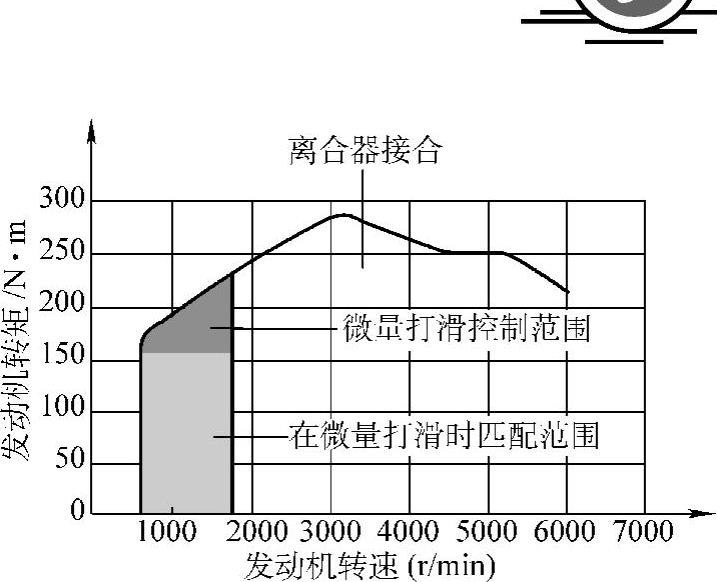
图5-31 离合器微量打滑控制曲线图
2.速比系统
无级变速器的关键部件是速比变换器(变速器),如图5-32所示,奥迪01J型无级变速器由两组滑动锥面链轮和作用在其中间的V形传动钢链组成,其中每一组滑动链轮中又有一可沿轴向移动的链轮,由于链轮的轴向移动,改变了接触链轮与传动链之间的跨度半径,最终实现传动比的变化。
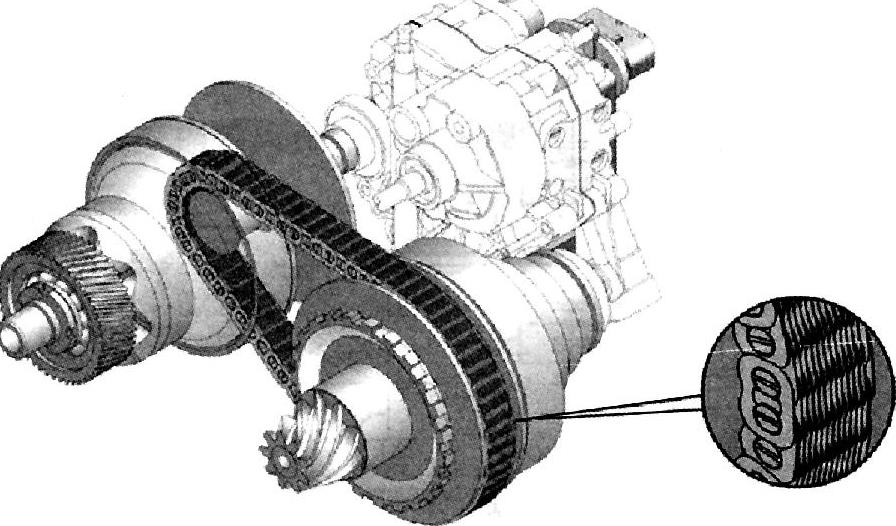
图5-32 速比变换器
速比变换器是由两个带锥面的链轮盘组成,即主动链轮装置和从动链轮装置以及工作于两个锥形链轮组之间的V形槽内的专用传动链组成。主动链轮由发动机通过辅助减速挡齿轮驱动,发动机转矩传动链传递到从动链轮装置,并由此传给主减速器。每组链轮装置中的一个链轮可沿轴向移动,来调整传动链的跨度尺寸和改变传动比,两组链轮装置必须同时进行,这样才能保证传动链始终处于张紧状态,并有足够的传动链和链轮之间的接触压力。速比变换原理如图5-33所示。
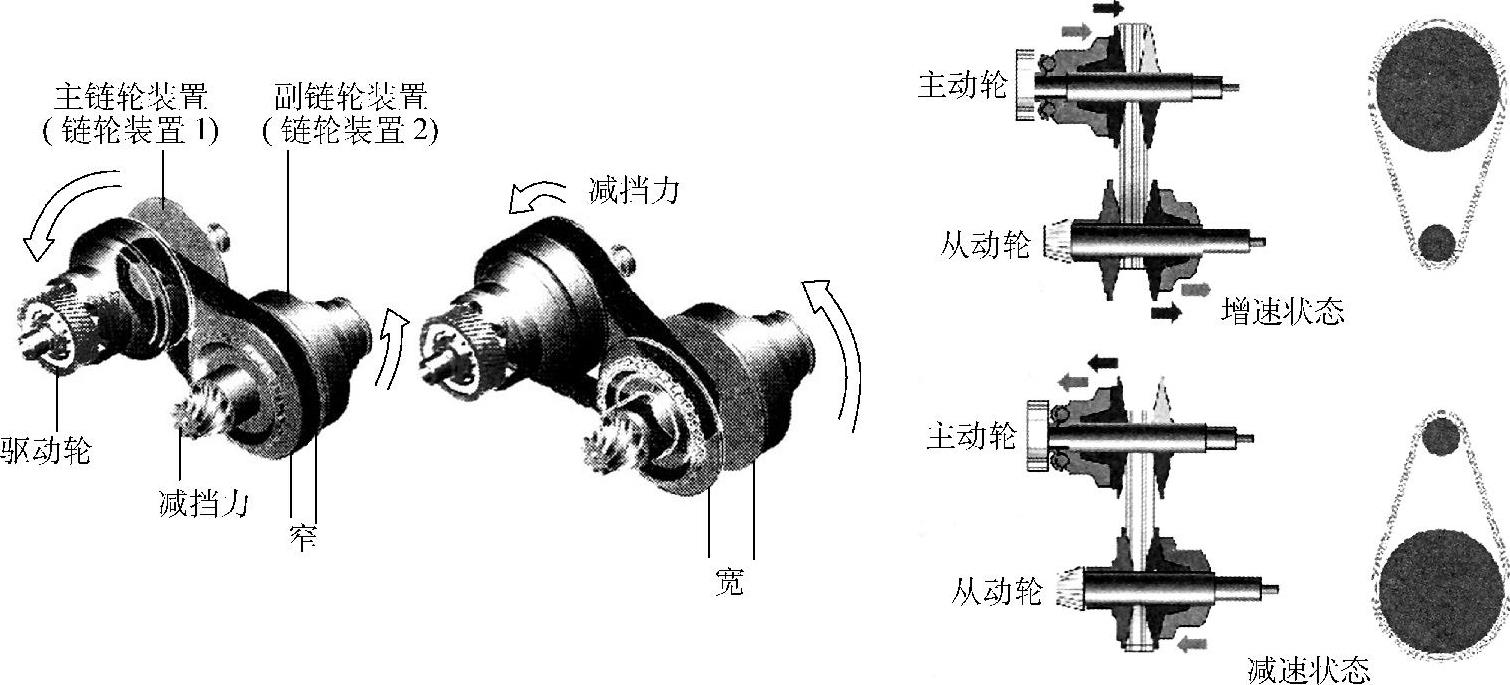
图5-33 速比变换原理
3.速比变换器(变速器)的特点和功能
无级变速器的速比变换器主要由三部分组成:主动锥形链轮、传动金属链和从动锥形链轮,如图5-34所示。
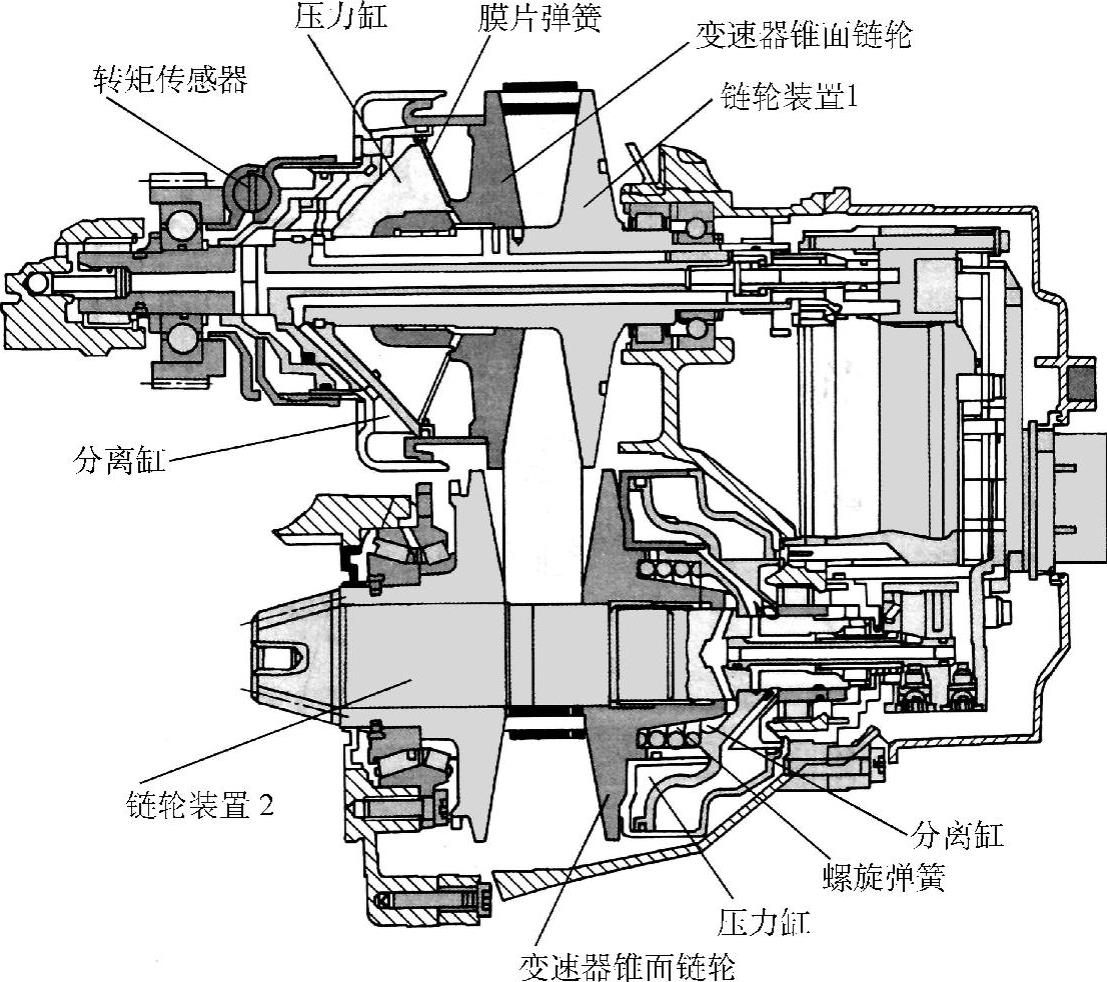
图5-34 CVT速比变换器的组成
奥迪Multitronic变速器的工作模式基于双活塞原理,该变速器的特点是利用少量的压力油就可以很快地进行换挡,这可以保证在相对低压时,锥面链轮与传动链之间有足够的接触压力。在链轮装置1和链轮装置2上各有一个保证传动链轮和传动链之间正常接触压力的压力缸和用于调整变速比的分离缸。为了有效地传递发动机转矩,锥面链轮和传动链之间需要很高的接触压力,接触压力通过调节压力缸内的油压产生。压力缸表面积很大,能够在低压时提供所需的接触力。液压系统泄压时,主动链轮膜片弹簧和从动链轮的螺旋弹簧产生一个额定的传动链条基础张紧力(接触压力)。在卸压状态下,变速器起动转矩变速比由从动链轮的螺旋弹簧力调整。
(1)换挡控制
1)电子控制部分。奥迪Multitronic变速器控制单元有一动态控制程序(DRP),用于计算额定的变速器输入转速,为了在每个驾驶状态下获得最佳齿轮传动比,驾驶员输入信息车辆实际工作状态要被计算在内。根据边界条件,动态控制程序(DRP)计算出变速器额定输入转速。变速器G182(输入转速传感器)监测主动链轮1处的实际转速。那么变速器控制单元会根据实际值与设定值进行比较,并计算出N216(压力调节电磁阀)的控制电流,这样N216产生液压换挡阀的控制压力,该压力与控制电流几乎是成正比的。控制单元通过检查来自变速器G182和变速器G195(输出转速传感器)及发动机转速信号来实现对换,如图5-35所示。速比变换过程如图5-36所示。
2)液力换挡控制(增速与减速)。液压控制阀体中的VSTV(输导压力阀)向N216提供一个约0.5MPa的常压,N216根据变速器控制单元计算的控制电流产生控制压力,该压力的大小会影响UV(减压阀)的位置。根据控制压力,UV将调节出来的压力传递到主动链轮和从动链轮的分离缸。当调节压力在1.8~2.2MPa之间时,UV处于关闭状态。当控制压力低于1.8MPa时,调节压力通过UV传递到主动链轮的分离缸,同时从动链轮的分离缸与油底壳接通,变速器向超速变速比的方向换挡,如图5-37所示。
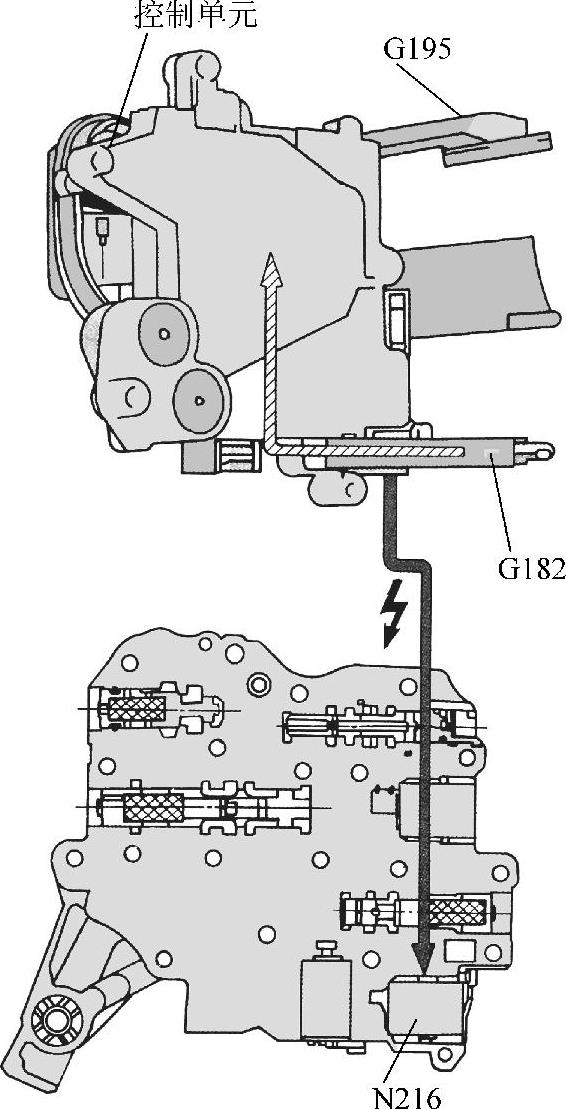
图5-35 速比变换控制
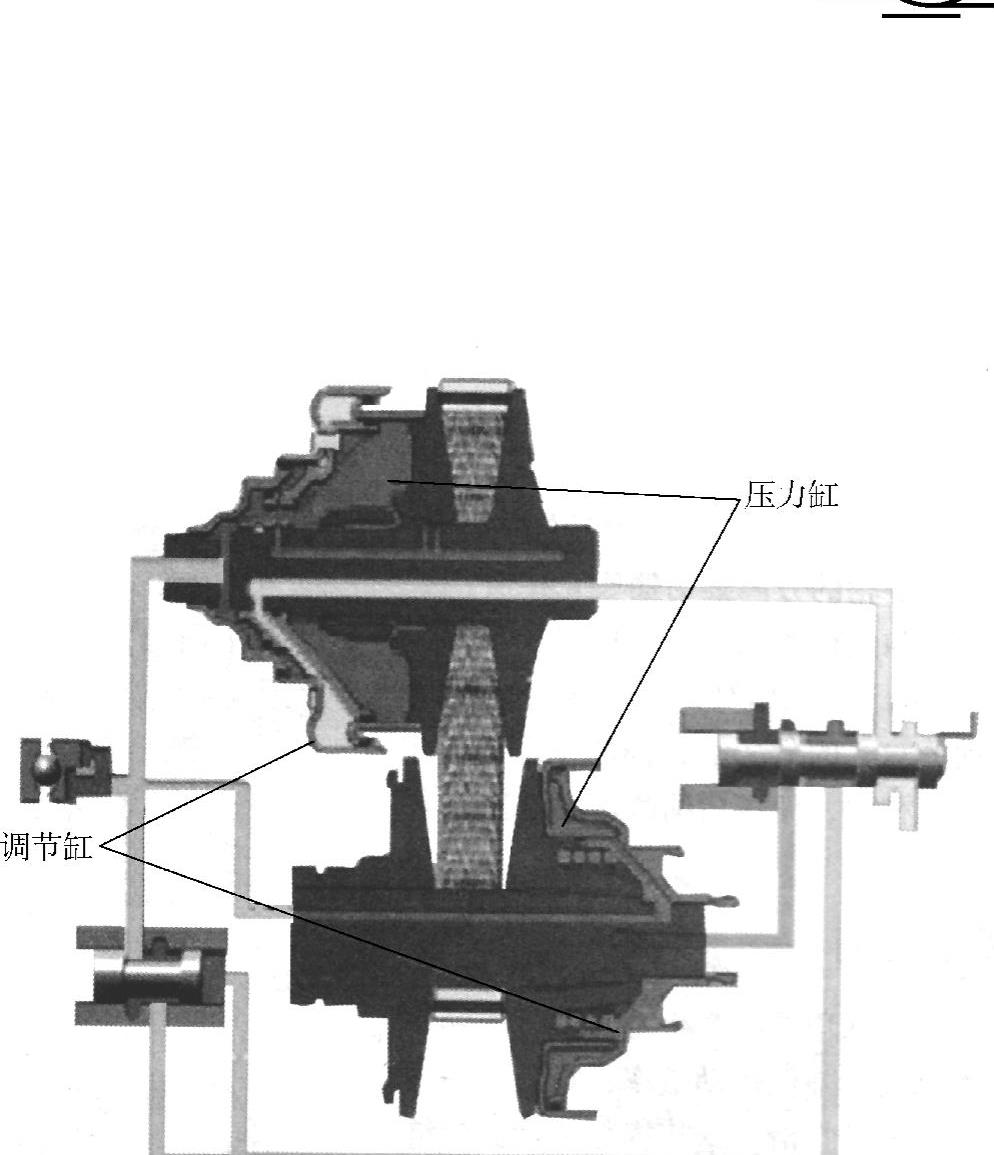
图5-36 速比变换过程
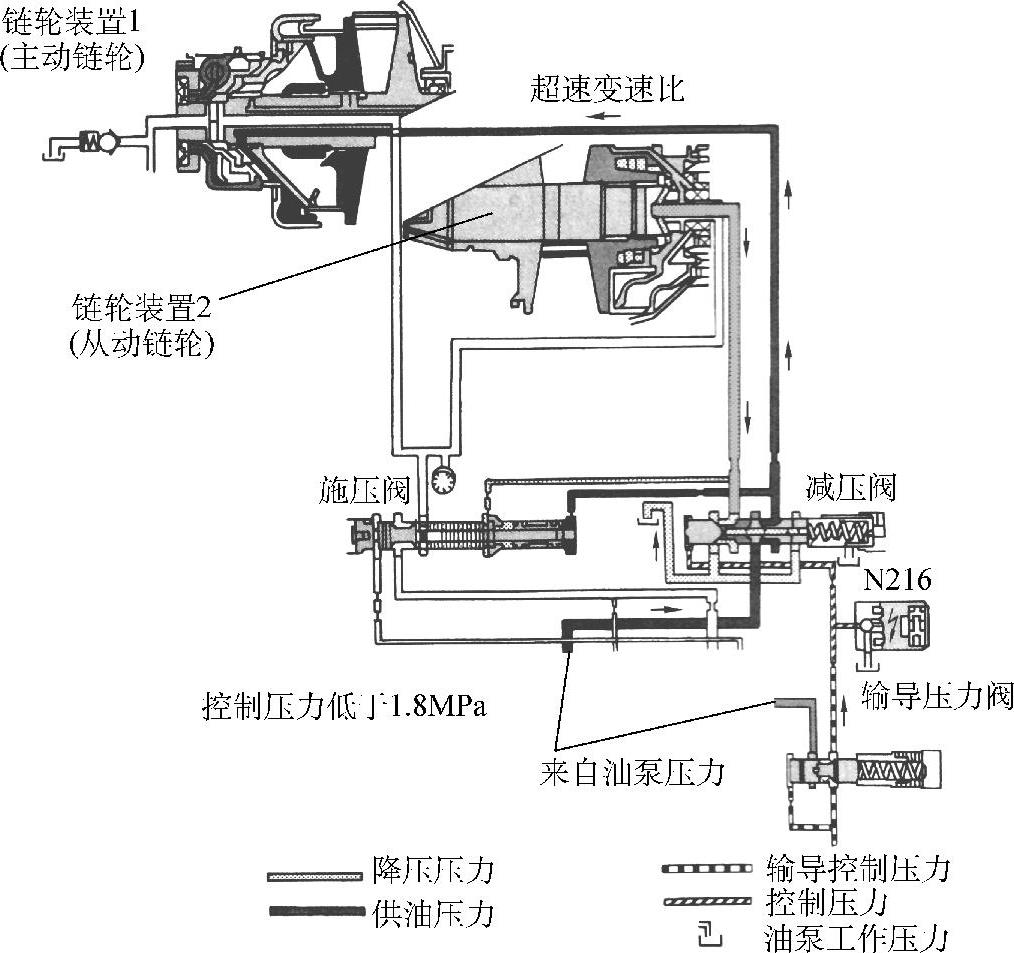
图5-37 增速控制
当调节压力高于2.2MPa时,调节压力通过UV传递到从动链轮的分离缸,同时主动链轮的分离缸与油底壳相通,变速器向减速变速比的方向换挡,如图5-38所示。
(2)接触压力控制 压力缸中合适的油压最终产生锥面链轮接触压力,若接触压力过大会降低传动效率;若接触压力过低,传动链会打滑,这将损坏传动链和链轮。因此机械式转矩传感器的目的就是根据要求建立起尽可能精确、安全的接触压力。液力/机械式转矩传感器集成在主动链轮内,静态和动态高精确度地监控传递到压力缸的实际转矩,并建立压力缸的正确油压。
机械式转矩传感器主要部件为两个滑轨架,每个支架有7个滑轨,滑轨中装有7个滚子如图5-39所示。
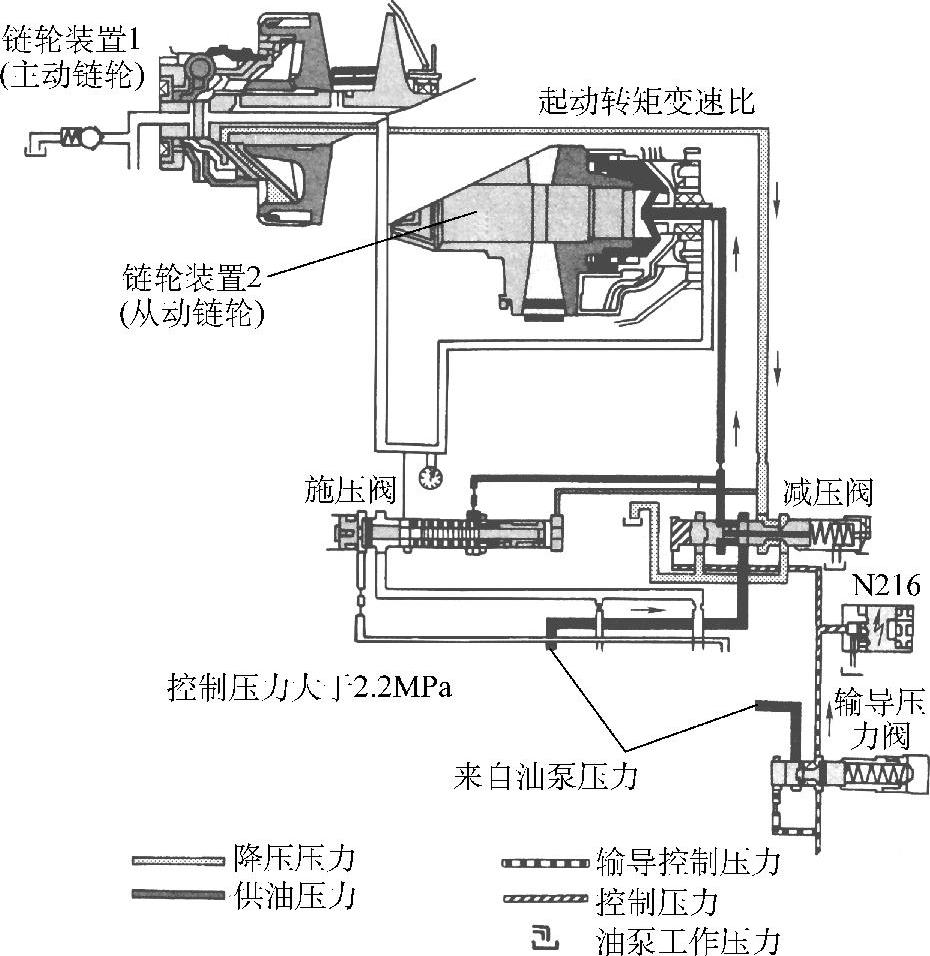
图5-38 减速控制
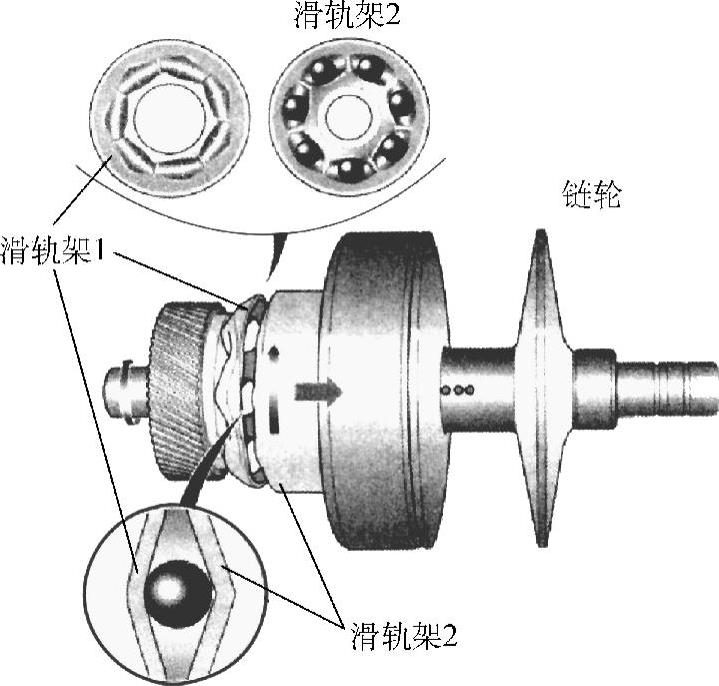
图5-39 转矩传感器的组成
如图5-40所示滑轨架1装于主动链轮1的输出齿轮中(辅助减速挡输出齿轮),滑轨架2通过内花键与主动链轮1连接,并可以轴向移动且由转矩传感器活塞支撑。转矩传感器活塞调整接触压力,并形成两个压力腔:转矩传感器腔1和腔2。转矩传感器产生的轴向力作为控制力,与发动机转矩成正比,压力缸中建立起来的压力与控制力成正比。转矩传感器支架彼此间可径向旋转,将转矩转化为轴向力(因滚子和滑轨的几何关系),此轴向力施加于滑轨支架2,并移动转矩传感器控制凸缘关闭或打开转矩传感器腔输出端,如图5-40所示。
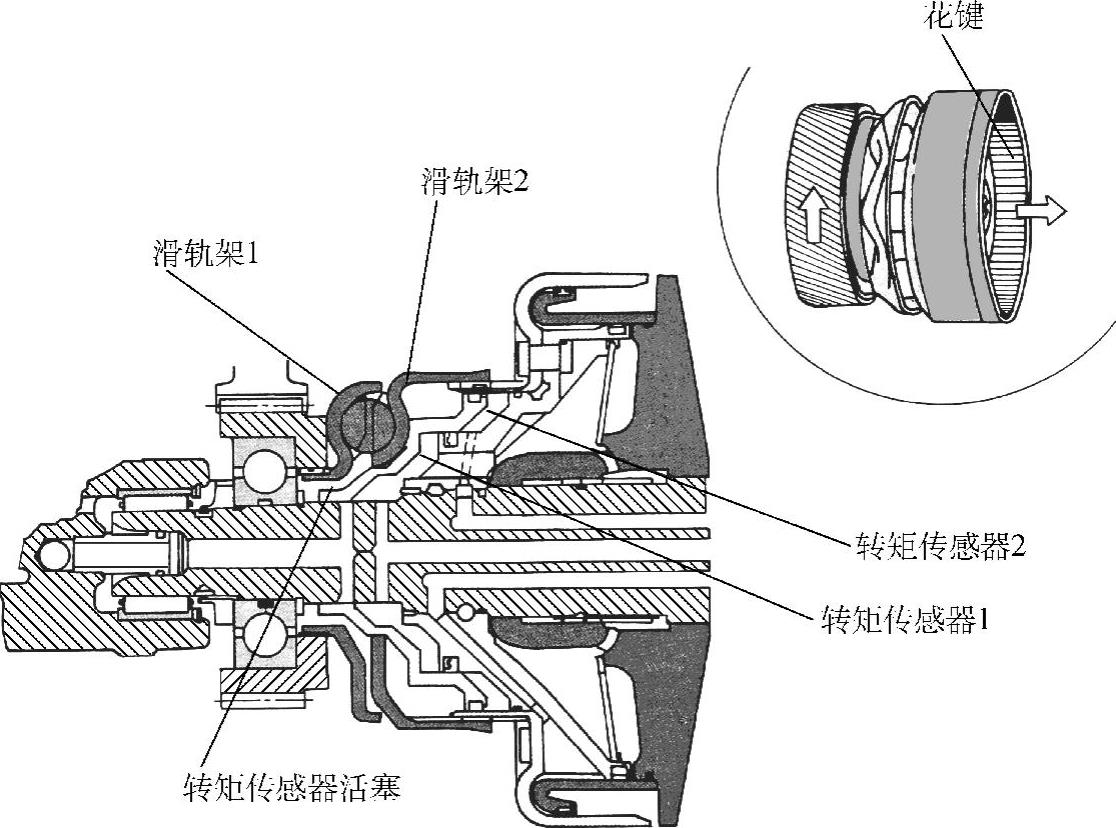
图5-40 转矩传感器工作原理
输入转矩低时:
转矩传感器腔1直接与压力缸相通。发动机转矩产生的轴向力与压力缸内的压力达到平衡。在汽车稳定运行的情况下,出油孔只部分关闭,打开排油孔(转矩传感器)后压力下降,出油孔进油压力降低,直至恢复压力平衡,如图5-41所示。
输入转矩高时:
转矩达到峰值时,控制凸缘完全关闭出油孔,若转矩传感器进一步移动,将会起到油泵作用,此时被排出的油使压力缸内的压力迅速上升,这样就毫无延迟地调整接触压力。锥面链轮产生的接触压力不仅取决于输入转矩,还取决于传动链跨度半径,此二者确定了变速器的实际传动比,如图5-42所示。
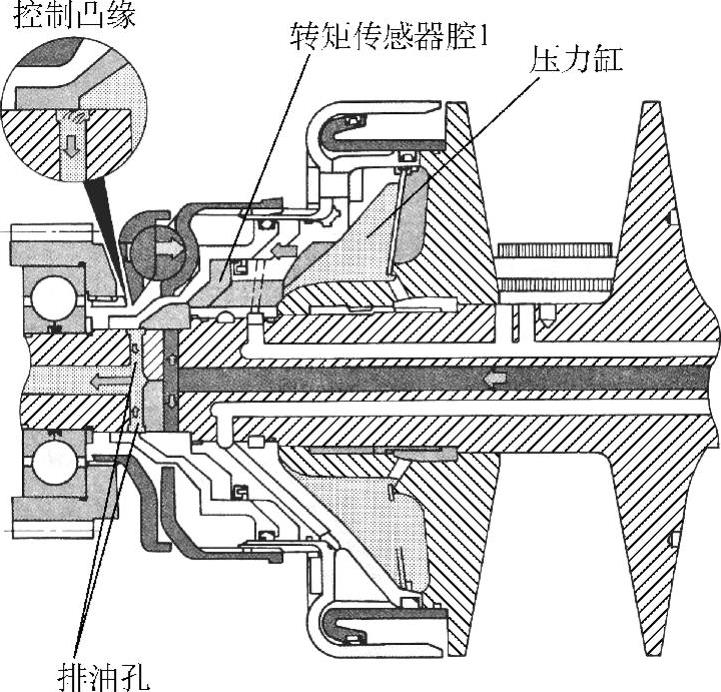
图5-41 低转矩输入时的控制
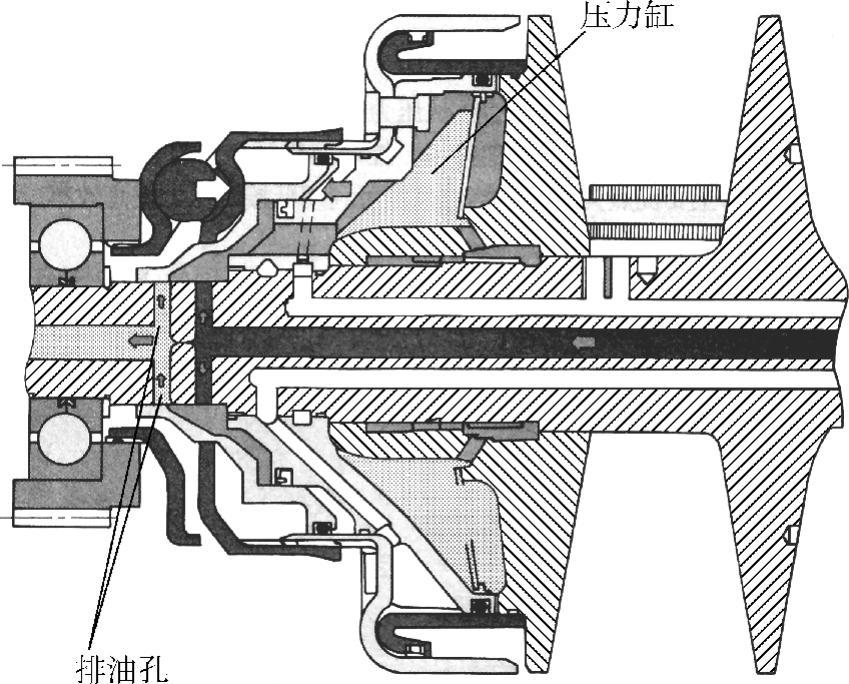
图5-42 高转矩输入时的控制
低速行驶时:
与传动比有关的接触压力在转矩传感器腔2内被调整。提高或降低转矩传感器腔2内的压力,压力缸内的压力也发生变化。转矩传感器腔2内的压力受链轮装置1轴上的两个横向孔控制。该孔通过变速器链轮的轴向移动关闭或打开。当变速器位于起动转矩挡(低速挡)时,横向孔打开(转矩传感器腔2泄压),如图5-43所示。
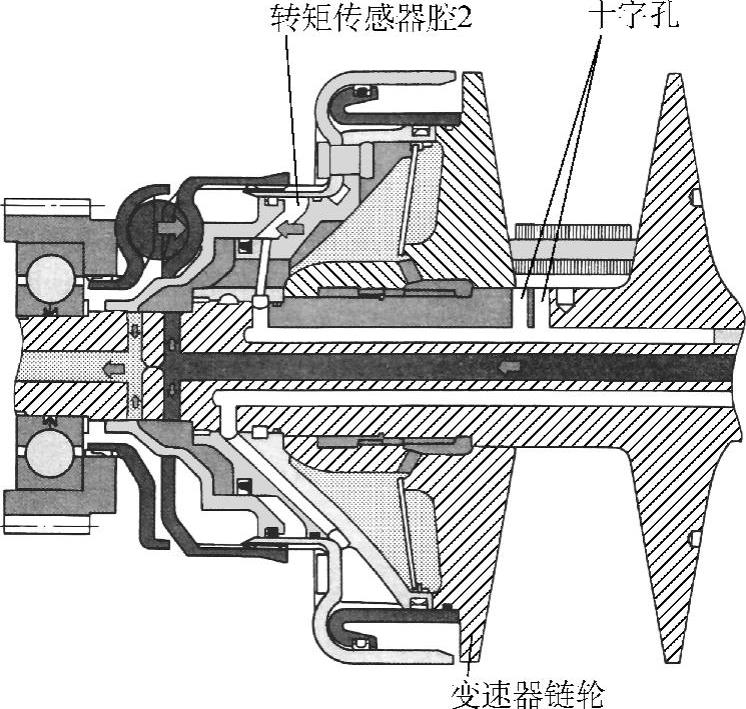
图5-43 低速行驶时的控制
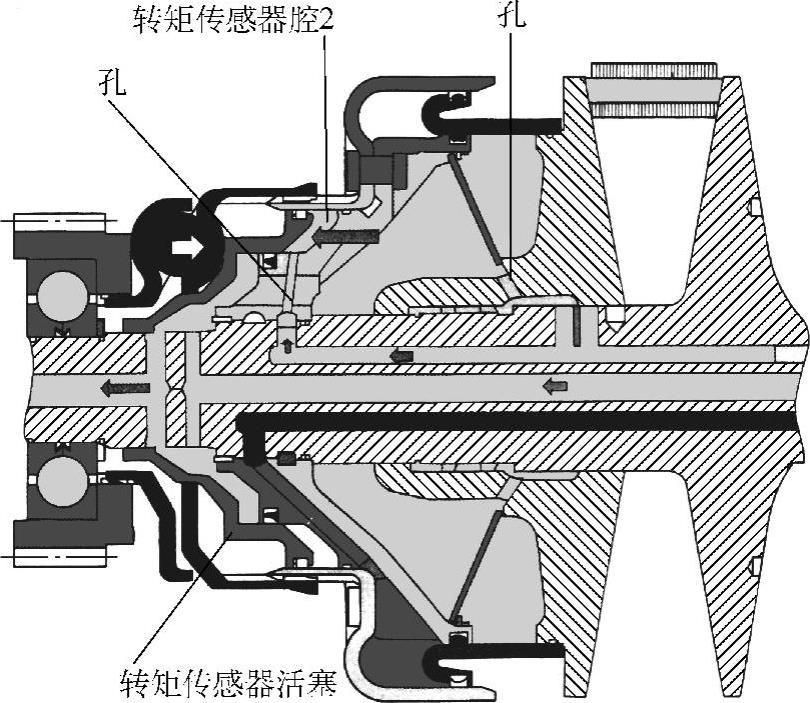
图5-44 高速行驶时的控制
高速行驶时:
如图5-44所示,当变速器换到高转速挡时,横向孔立即关闭,左侧横向孔打开,油通过相关的可变锥面链轮孔,该孔与压力缸相通,此时油压从压力缸传入转矩传感器腔2,该压力克服转矩传感器的轴向力并将转矩传感器活塞向左移动,控制凸缘进一步打开出油孔减小压力缸内的油压。双级压力适配的主要优点为中间挡位范围可利用低接触压力提高效率。
(3)动态压力控制 位于链轮装置2上的飞溅润滑油盖是该变速器的又一个独特的结构,它可阻止压力缸建立起动态压力。在发动机转速很高时,压力缸内变速器油承受很高的旋转离心力,使其压力上升,此过程称为动态压力建立。动态压力建立不是所希望的,因其不恰当地提高了接触压力,并对传动控制产生有害影响。封闭在飞溅润滑罩盖内的油承受与压力缸内油相同的动态压力,这样,压力缸内的动态压力得到补偿。飞溅润滑油腔通过润滑油喷射孔直接从液压单元处获得润滑油,通过此孔,润滑油连续喷入飞溅润滑油腔入口。飞溅润滑油腔容积减少(当改变传动比时),使润滑油从供油入口排出,如图5-45所示。
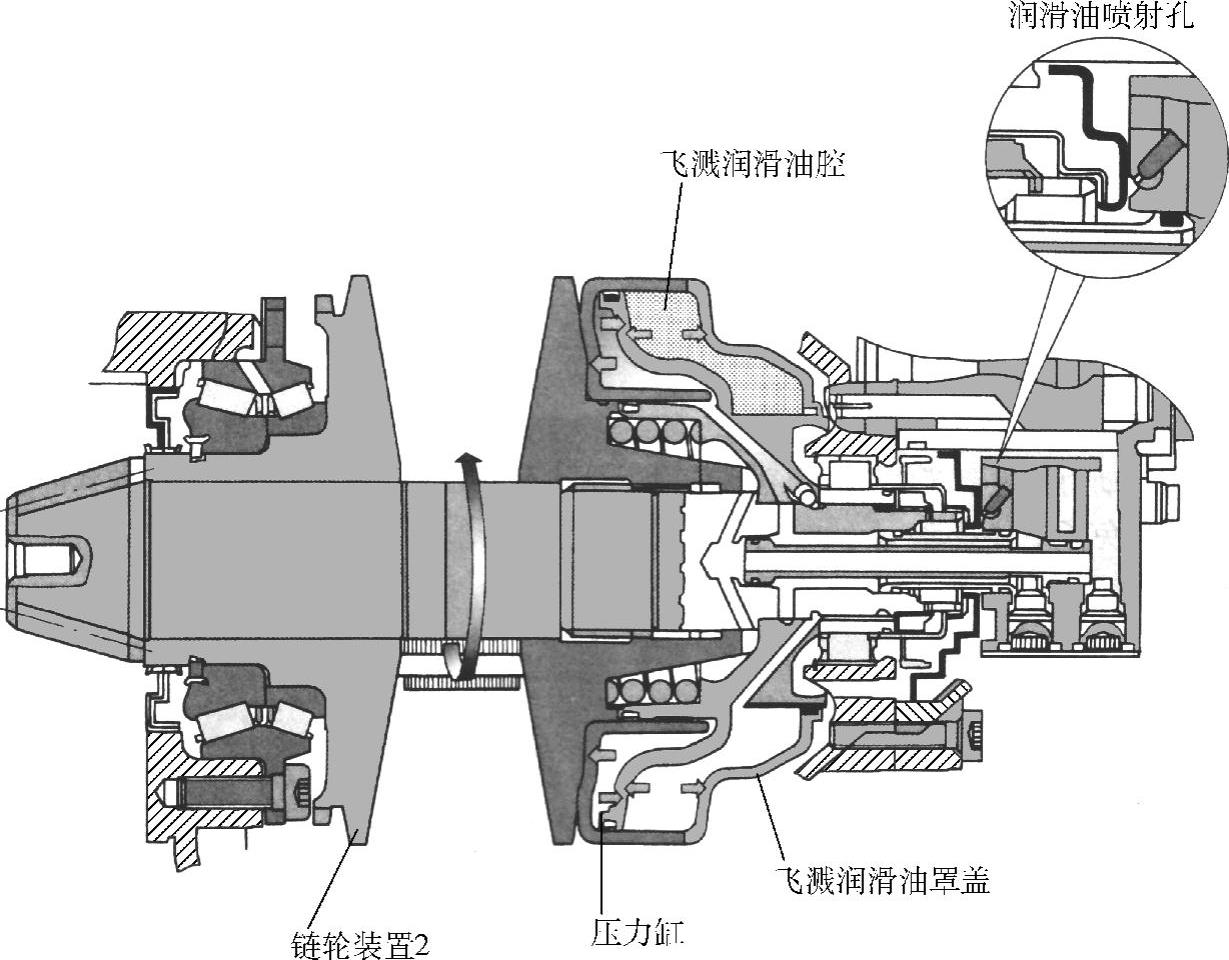
图5-45 动态压力控制
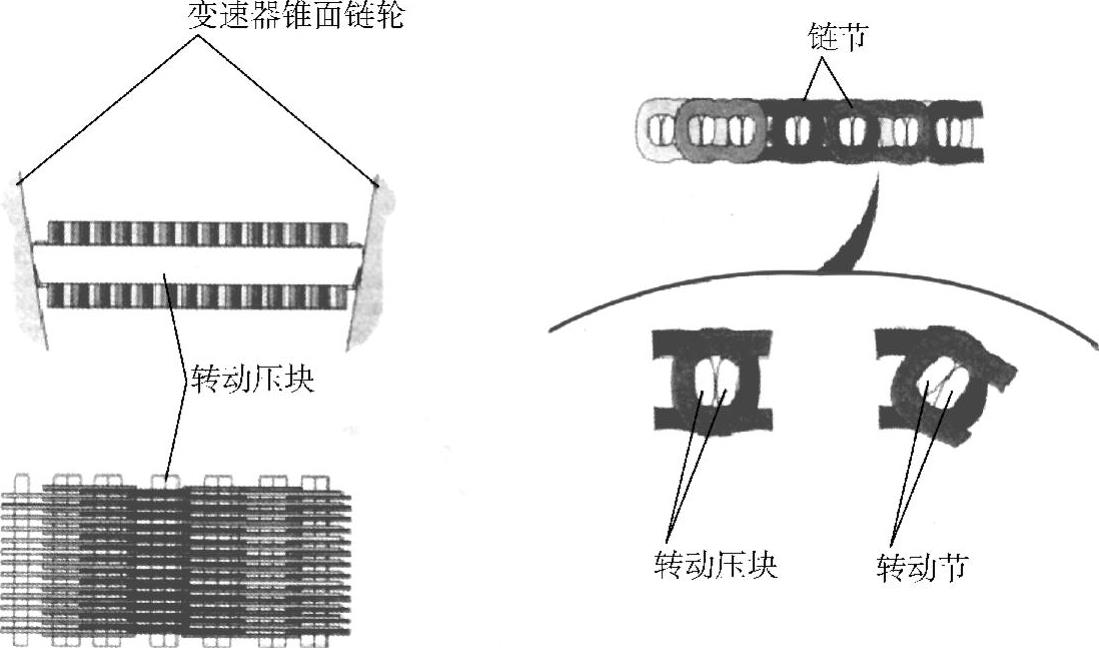
图5-46 传动链
(4)传动链 它是Multi-tronic变速器的关键部件,如图5-46所示,传动链较以前的滑动带或V形带具有转矩大和效率高等特点。每个转动压块永久性连接到一排连接轨上,通过这种方式,转动压块不可扭曲,两个转动压块组成一个转动节。转动压块相互滚动,其在锥面链轮跨度半径范围内驱动传动,几乎没有摩擦。在这种情况下,尽管转矩和弯曲角度大,动力损失和磨损却降到最小,使其寿命延长并提高了效率。传动链是由两种不同长度的链节构成的,其目的是防止共振并减小运动噪声。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




