复杂路面条件下BERS对驱动轮滑转率的控制需要基于驾驶人加速驾驶意图判断结果合理协调发动机转矩干预和主动制动来实现。根据轮胎的附着特性曲线(图7-31),当车轮的滑转率在10%~35%的范围内,轮胎纵向和侧向力均在较高水平。BERS系统通过发动机输出转矩控制和主动制动控制调节驱动轮滑转率在这一范围内,在实现驱动稳定性的前提下提高电动车辆的加速性能。
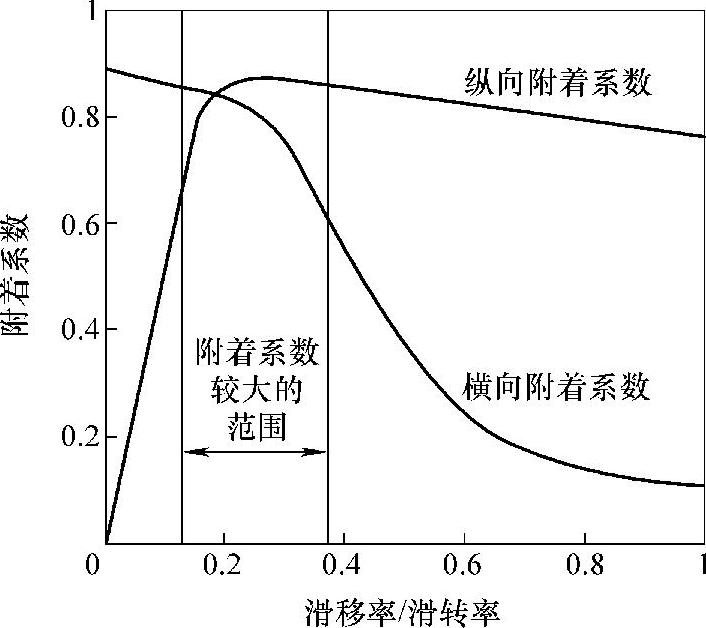
图7-31 纵向和侧向附着系数与滑转率的关系
考虑到制动能量控制的优点是无须了解被控对象的力学模型,只需根据经验调节控制参数即可获得满意效果。由实际路况、驱动轮工况变化,设计了可变参数的自适应制动能量控制器,来克服传统制动能量控制的不足。在分析时,考虑到电动汽车前后载荷的转移,忽略行驶过程中的滚动阻力和空气阻力及坡道阻力的影响,建立包括4轮转动、车身俯仰运动和纵向运动的4轮6自由度整车模型。微分方程如下:
整车纵向:
整车俯仰:
四轮转动:



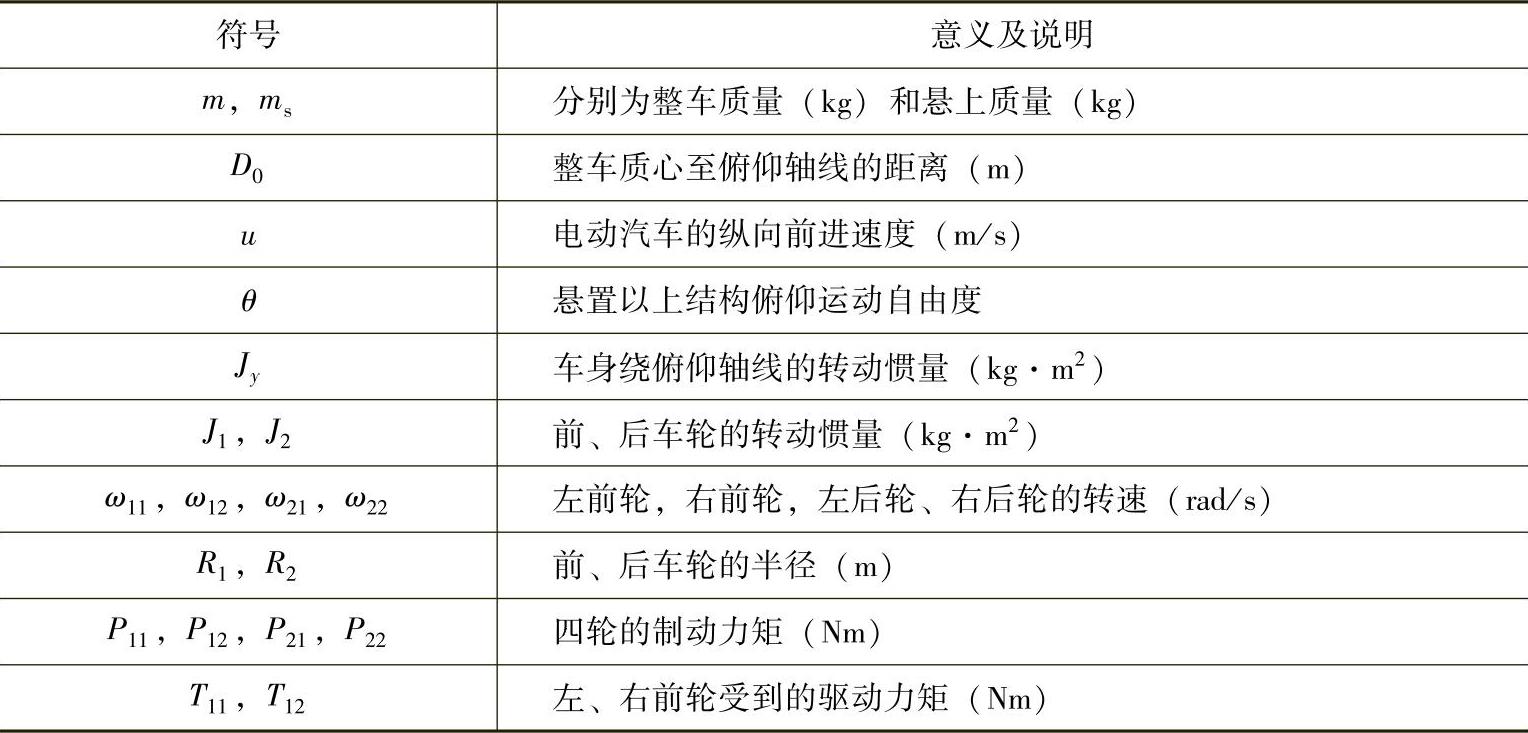
式中参数意义见表7-1。
表7-1 车辆动力学模型参数
考虑纵向受力情况,轮胎模型采用魔术公式,纵向力表述为

式中,D为峰值因子;C为形状因子;B为刚度因子;E为曲率因子;λ为车轮滑转率。在BERS中,驱动轮滑转率定义为

式中,vref为参考车速;ω为车轮的角速度。
魔术公式中各因子的表达为
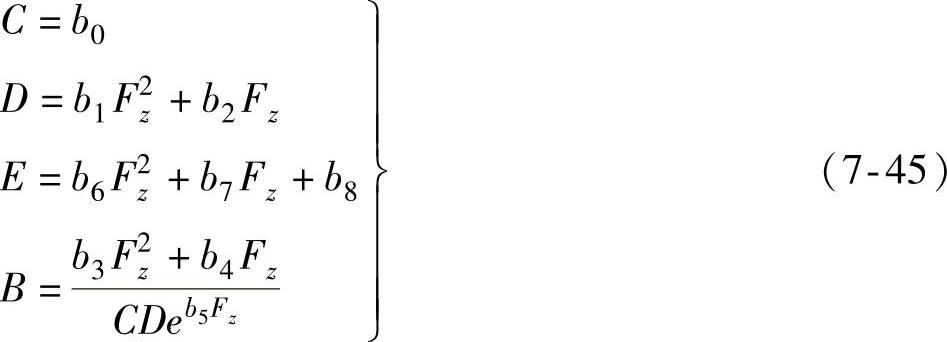
式中,Fz为垂直载荷;b0~b8为轮胎模型特性系数,采用利用附着系数变化率估算路面附着系数,如图7-32所示。
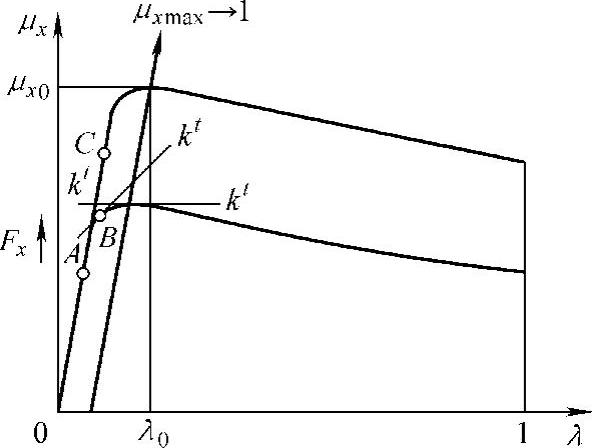
图7-32 路面附着识别示意图
最优目标滑转率估算是滑移率控制的基础,最优滑转率与路面附着相关,体现了最终的路面附着能力的利用率。根据附着系数-滑移率特性曲线(图7-33),路面峰值附着系数和最优滑转率λs之间可近似为线性关系:

式中,A0、A1为系数,可以通过轮胎试验标定。此处A0=0.05,A1=0.3。
系统控制逻辑结构如图7-35所示,驾驶人输入节气门开度和档位控制,发动机模型采用MAP图实现,根据节气门开度和转速信号可得驾驶人期望的转矩;当期望的转矩远大于路面最大驱动力矩时,车轮出现滑转,控制器根据轮速传感器信息实时计算路面附着系数和最优目标滑转率。
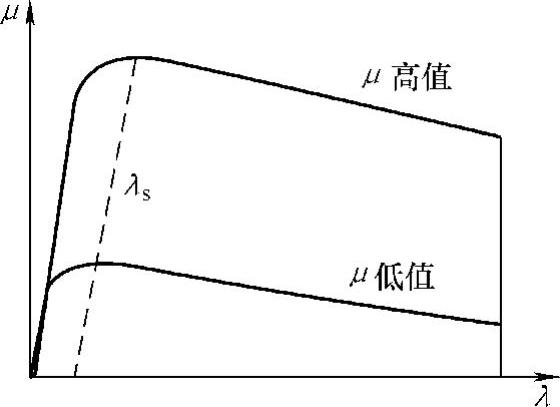
图7-33 最优滑转率和路面附着关系
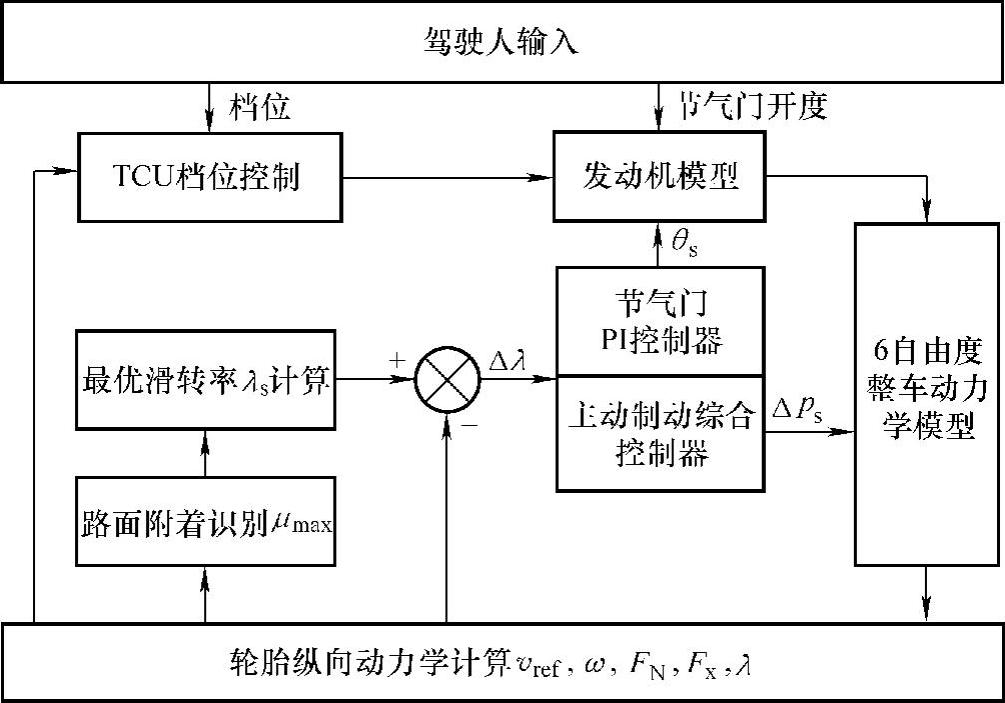
图7-34 BERS的控制逻辑
采用节气门的PI控制方式,被控变量选用既反映滑转率又便于观测的轮速,设最优目标滑转率为λs,参考车速为vref,则目标轮速的计算公式为(https://www.daowen.com)

令两驱动轮轮速平均值为vr=(v11+v12)/2,则偏差e(k)=vrt(k)-vr(k)。目标节气门开度θs(k)是实现目标滑转率的节气门开度,采用PI控制器实现:

式中,比例系数Kp较大时,系统的响应速度快,调节精度高,但是过大的比例系数会导致系统不稳定。积分系数Ki较大时,系统的静态误差消除较快,但取值过大会在响应过程的初期产生积分饱和现象,从而引起系统的较大超调。
目标干涉压力ps为实现最优目标滑转率的干涉压力值,增量式制动能量控制器计算出目标干涉压力的变化速率Δps(k)为

式中,Kp、Ki、Kd分别是比例系数、积分系数和微分系数。
采用动力性自动换档策略且换档过程中无动力中断,车辆初始速度均为1m/s。路面为低附到高附变换的对接路面,路面附着系数前2s为0.2,后2s为1.0,起步加速。仿真结果如图7-35和7-36所示,图中线段1代表车速,线段2、3分别代表左前、右前驱动轮轮速,线段4、5分别代表左前、右前轮缸内的主动干涉压力,6为加速踏板开度,7为电子节气门开度。
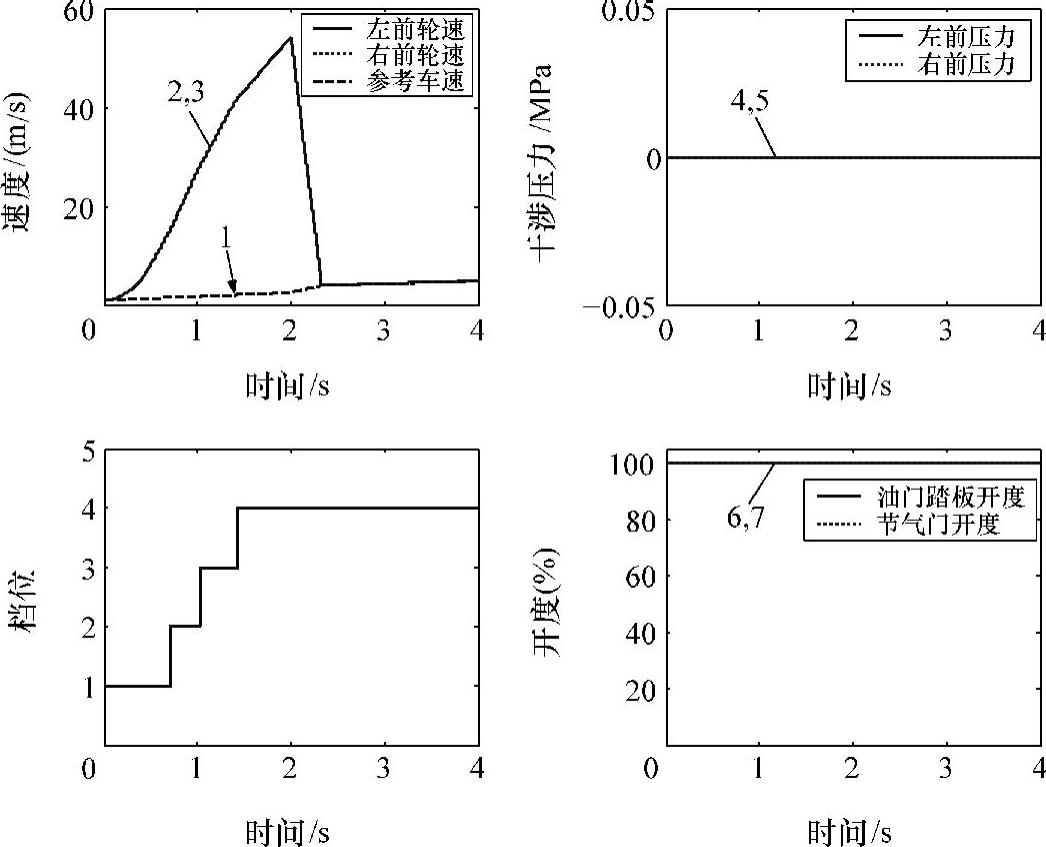
图7-35 附着系数低→高对接水平路面起步加速(无BERS控制)
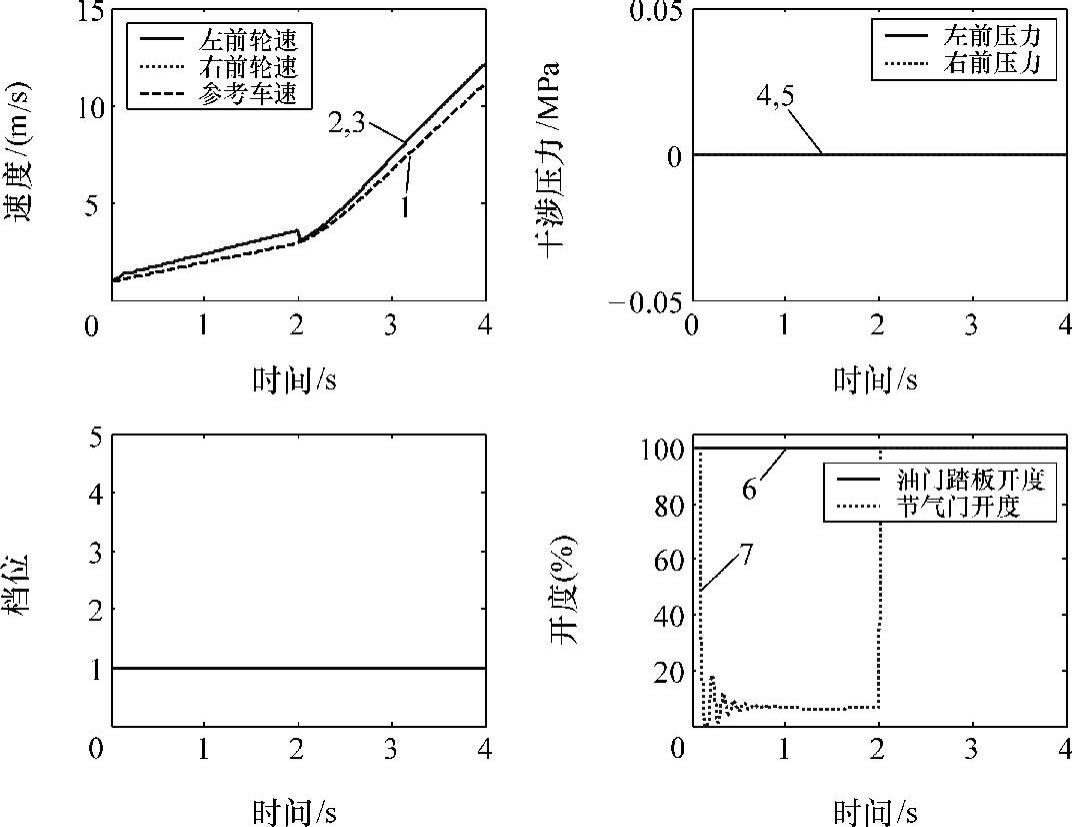
图7-36 附着系数低→高对接水平路面起步加速(有BERS控制)
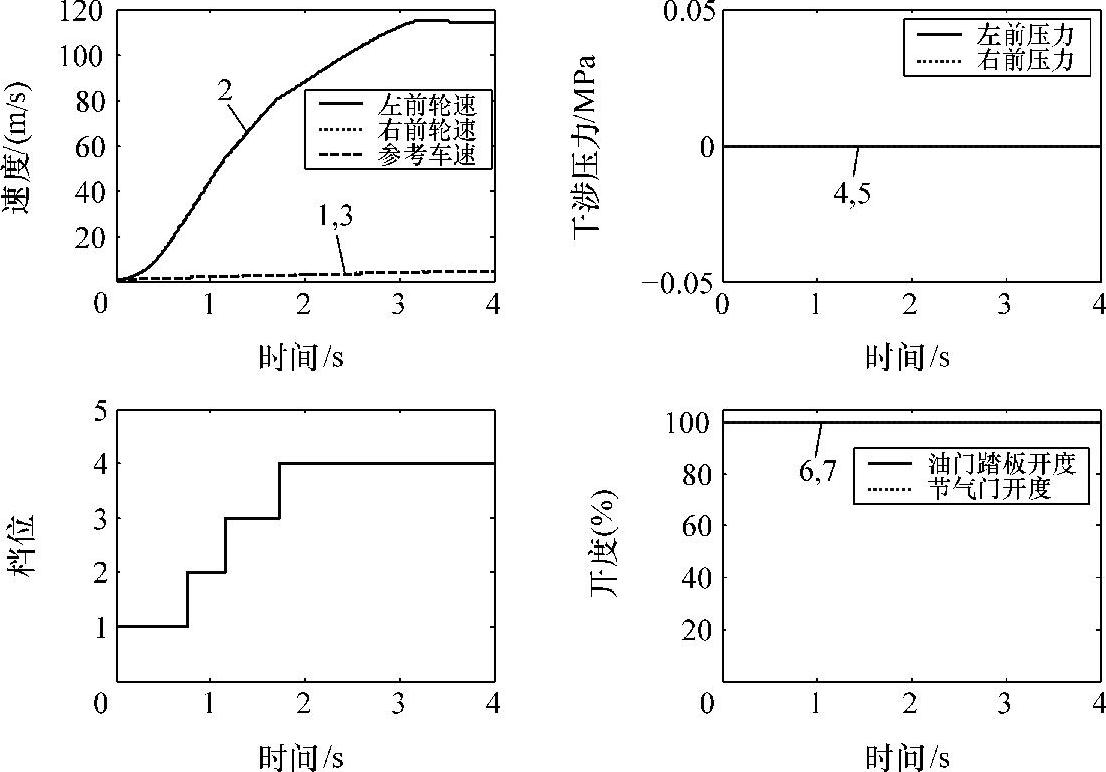
图7-37 水平对开路面起步加速(无BERS控制)
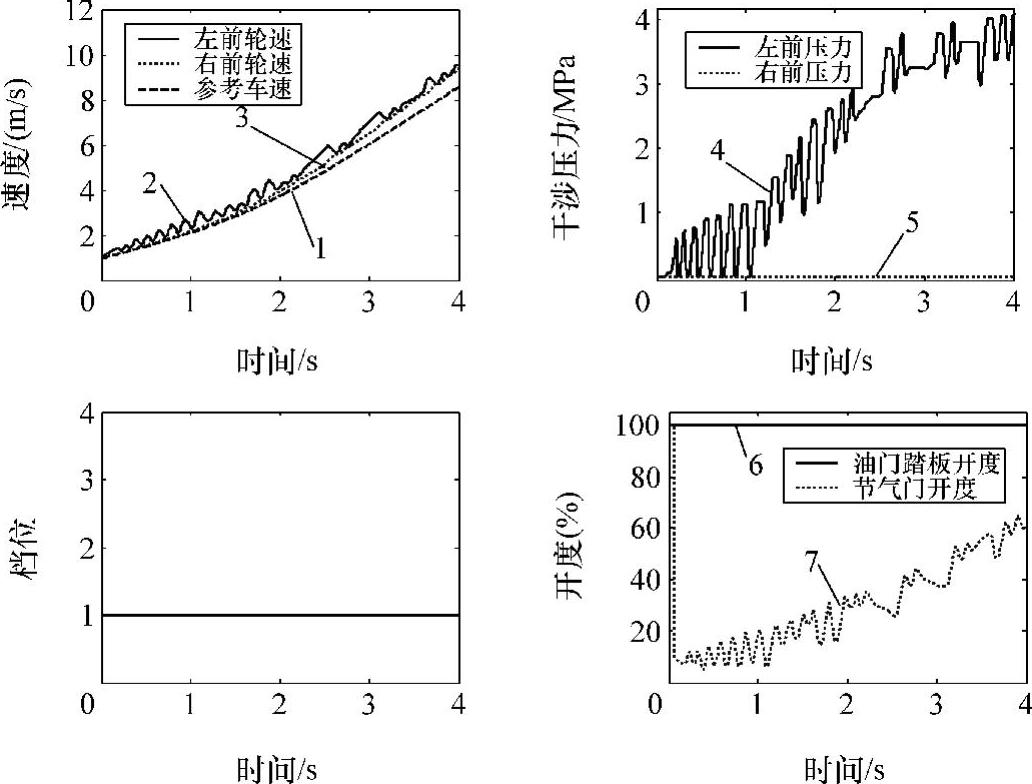
图7-38 水平对开路面起步加速(有BERS控制)
由图7-35可知,无BERS控制时,车辆在2s内处于低附着路面上,驱动轮滑转严重,自动变速器档位由1档升高到4档,后续加速能力受到限制,仿真结束时末速度为4.93m/s,行驶距离为12.10m。由图7-36可知,有BERS控制时,驱动轮滑转率受到控制,档位保持在1档,仿真结束时末速度为11.12m/s,行驶距离为17.40m,分别提高125.56%和43.80%。水平对开路面起步加速仿真中附着系数设为左侧路面0.2,右侧路面1.0,结果如图7-37和图7-38所示。在图7-37中,无BERS控制时,低附侧驱动轮获得的驱动力远大于路面附着力,驱动轮发生严重滑转,车辆从1档逐步升高到4档,仿真结束时末速度为4.78m/s,行驶距离为12.0m。图7-38所示有BERS控制时,在低附侧施加主动压力干涉后,低附侧所能利用的驱动力矩增大,高附侧驱动轮可以施加更大的驱动力矩,以充分利用该侧的路面附着能力,试验中驱动轮无过度滑转,仿真末速度为8.55m/s,行驶距离为16.5m,分别提高78.87%和37.5%。
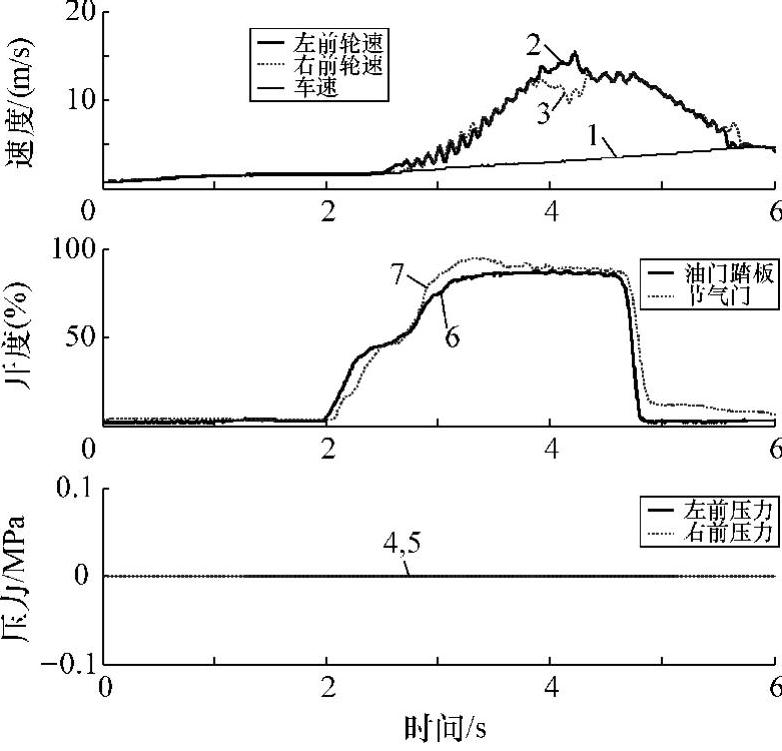
图7-40 低附路面实车试验(无BERS控制)
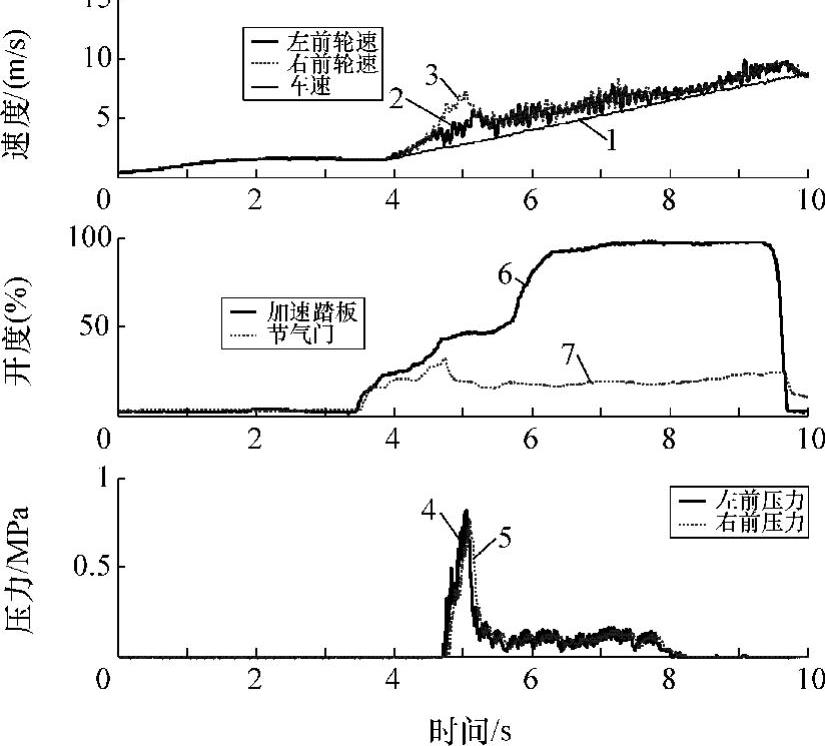
图7-41 低附路面实车试验(有BERS控制)

图7-39 试验车辆
采用发动机节气门干涉和主动压力干涉,既提高车辆行驶的动力性能又保证车辆行驶的侧向稳定性。实车试验路面附着系数在0.25左右;对开路面高附侧为水泥路面,由于路面比较潮湿,高附侧路面附着系数约0.6。图7-39所示为试验车辆。
图7-40是无BERS控制时的试验结果。试验过程中变速器档位保持在1档,加速踏板开度较大,节气门几乎全开,两驱动轮滑转严重,在车速低于3.2m/s时驱动轮轮速已经达到了15.4m/s以上。图7-41是有BERS控制时的试验结果。试验过程中变速器档位保持在1档,加速踏板开度较大,开始时节气门开度随着加速踏板开度增大而增大,当驱动轮出现轻微滑转时,节气门开度不再跟随加速踏板开度增大而增大,而进入变化较为平稳的控制阶段,为了迅速控制驱动轮的滑转,进行一定程度的主动压力干涉。图7-42是对开路面上无BERS控制时的试验结果。车辆左侧车轮在高附着路面上,右侧车轮在低附着路面上。试验过程中加速踏板开度较大,接近95%开度,节气门开度几乎达到100%。由于右侧车轮在低附着路面上,因而右侧车轮出现了滑转,在车速不到6m/s时右侧驱动轮轮速已经超过23m/s。在此过程中驾驶人可以听见驱动轮滑转发出的尖锐声音,驾驶舒适性较差。图7-43是对开路面上有BERS控制时的试验结果。当驱动轮出现滑
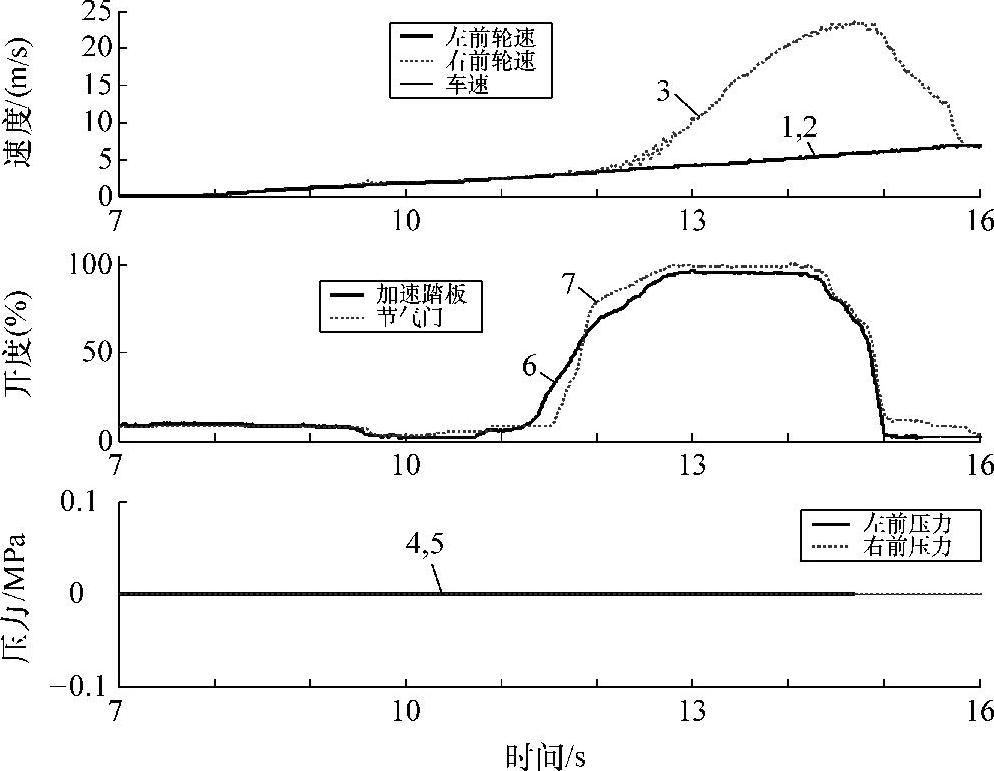
图7-42 对开路面实车试验(无BERS控制)
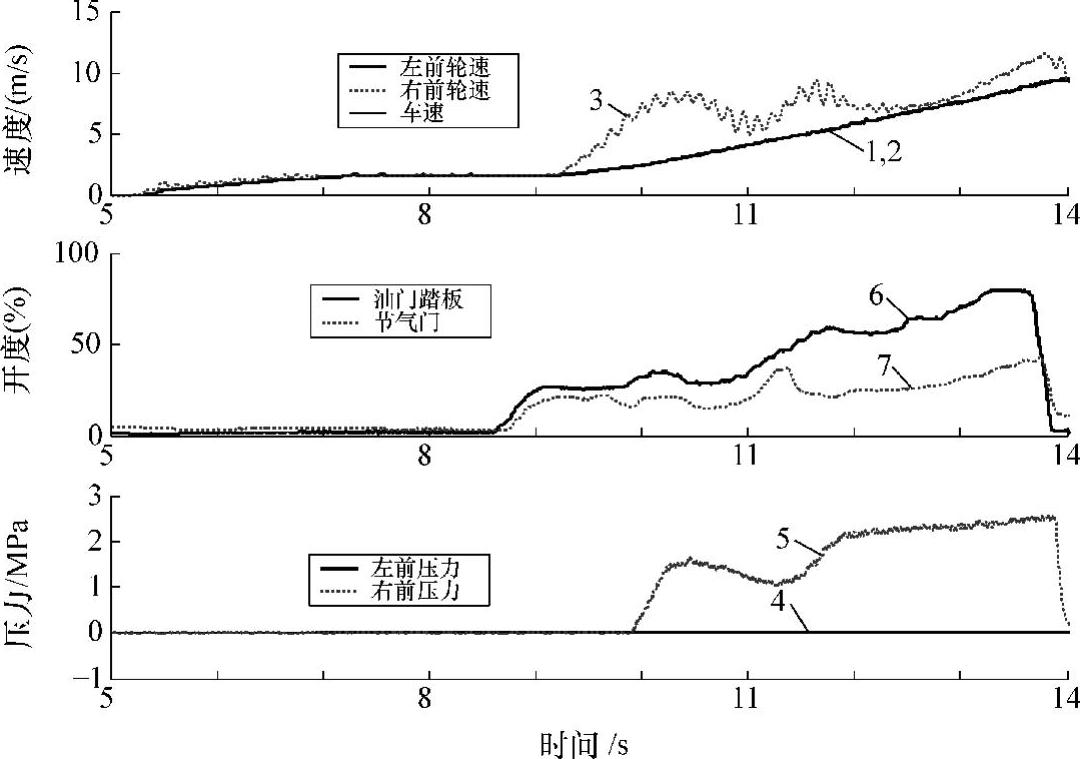
图7-43 对开路面实车试验(有BERS控制)
转趋势时,节气门开度不再随着加速踏板开度增大而增大,而是进入变化较为平稳的控制阶段。在对开路面上只有低附侧驱动轮会出现滑转,通过对低附侧驱动轮进行主动压力干涉来提高车辆的加速能力,在此过程中低附侧驱动轮受到的主动干涉压力较大,最大干涉压力值达到2.5MPa。
复杂路面条件下的BERS有可变参数制动能量控制器控制策略。该策略能够对BERS工作中路面附着条件的变化进行自适应的调整控制参数,从而获取良好的整车驱动性能和行驶稳定性,具有实际应用价值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





