制动系统在汽车的安全方面扮演着至关重要的角色。20世纪80年代后期,随着电子技术的发展,世界汽车技术领域最显著的成就就是防抱制动系统(Anti-lock Braking System,简称ABS)的实用与推广。ABS集微电子技术、精密加工技术、液压控制技术为一体,是机电一体化的高技术产品。它的安装大大提高了汽车的主动安全性和操纵性。随着人们对制动性能要求的不断提高,防抱死制动系统(ABS)、牵引力控制系统、电子稳定性控制程序、主动碰撞技术等功能逐渐融入制动系统中,越来越多的附加机构安装于制动线路上,使制动系统的结构更加复杂,也增加了液压管路泄漏的隐患以及装配、维修的难度。因此结构更简捷、功能更可靠的制动系统呼之欲出。随着电子,特别是大规模、超大规模集成电路的发展,制动系统的形式也将发生变化。制动能量回收系统(Brake Energy Recovery System,BERS)是未来制动控制系统的发展方向。BERS制动力矩为:
M=rF=rmgsinα(6-1)式中,M为力矩设计值;r为有效车轮半径;F为实际受力;m为车轮所承受的质量;g为重力加速度;α为路面倾斜角。
输入计算参数:
M=J/r2w(6-2)式中,J为试件所承受的转动惯量;rw为有效车轮半径。当输入倾斜角设计值后,系统会按下式计算:
M=gJsinα/rw(6-3)
式中, 其中G为斜率。
其中G为斜率。
采用惯性式BERS实验台对BERS进行测试。其主要部件有实验工作站、飞轮装置和直流电机驱动单元。通过水平装配的压力传感器测出试件和实验台所产生的力矩。飞轮装置是用来模拟车辆转动惯量,从而模拟车辆的道路驾驶情况,它的传动轴上连有一个用来装夹制动盘或制动鼓的法兰,还有飞轮片的离合装置。飞轮装置在加速或减速的过程中,会产生加速度或制动力矩,设置飞轮模拟质量要依据该类型车辆的有关参数计算出被试BERS所承受的惯量来确定。BERS实验总体设计如图6-1~图6-3所示,主要组成有实验BERS、试验车和试验台架等。BERS系统转动惯量由下式校准:
J=LVmr2(6-4)式中,J为转动惯量(kg·m2);LV为相关试样所分配到的比例负载;m为车辆质量(kg);r为动态车轮半径。
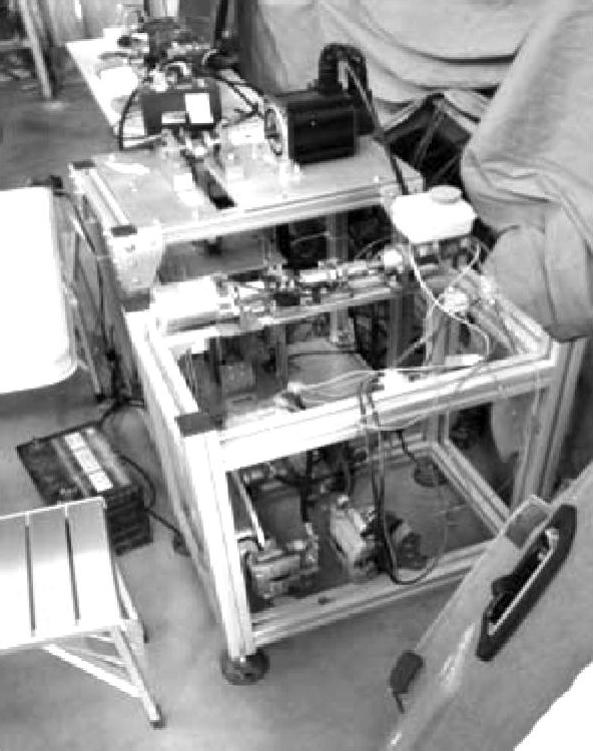
图6-1 制动能量回收机电耦合系统

图6-2 BERS实验车
 (www.daowen.com)
(www.daowen.com)
图6-3 BERS控制策略仿真实验台架
力矩为
Ms=Ma-Mb-Mr(6-5)
式中,Ms为转动轴上的计算总力矩(Nm);Ma为直流电机转矩;Mb为BERS的制动力矩;Mr为实验台摩擦力矩。
对角速度进行积分求出转速:
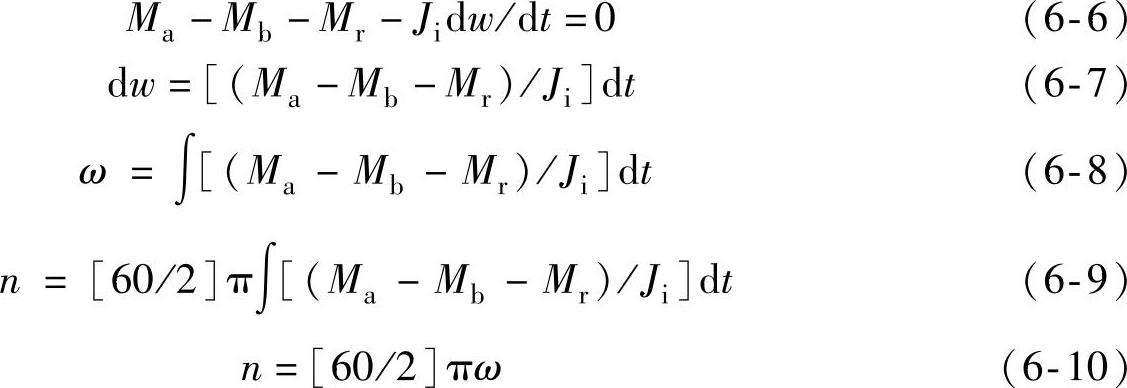
式中,Ji为转动惯量(kgm2);ω为角速度(rad/s);n为每分钟转数(r/min);t为时间(s)。

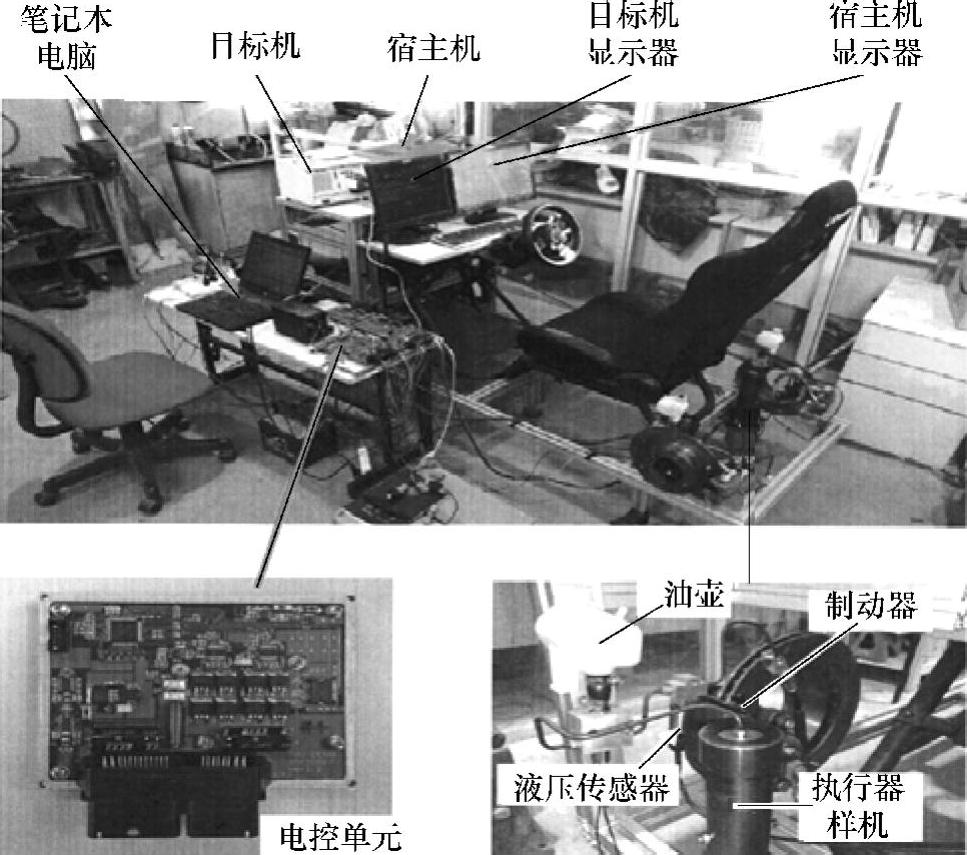
图6-4 BERS特性分析实验台
a)BERS台架仿真装置 b)BERS软件环境仿真装置 c)SCHENCK(PWD-C/V-75-200)惯性测功机
由BERS台架仿真、BERS软件环境仿真装置和SCHENCK(PWD-C/V-75-200)惯性测功机,构成动态BERS特性分析,如图6-4所示。该实验系统适用于电动车辆BERS总成的动态功能测试,根据BERS性能要求,进行实车动态仿真,对BERS的总成进行全方位的功能测试。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





