臂架系统液压回路包括油源回路、臂架变幅回路、臂架回转回路和支腿动作回路,而油源回路又可分为定量泵供油系统和带负载敏感阀的变量泵供油系统,以下我们分别介绍。
(一)油源回路
如前所述,油源回路分为定量泵供油系统和带负载敏感阀的变量泵供油系统,但这两种系统均为负载敏感系统,其区别在于定量泵供油系统中的臂架泵提供固定的流量,而负载所需要的流量由多路阀控制块中三通流量阀来调节;而变量泵供油系统由变量臂架泵直接根据不同负载的需要,输出不同的流量。
在油源回路中是由多路阀的各片换向滑阀规定该滑阀A、B油口的最大流量,当然在应用中臂架泵的最大流量不可能大于等于各片换向滑阀流量的总和,这就意味着当多个臂架液压缸组合动作时,如需要的总流量大于了臂架泵的最大流量,则各片换向滑阀各油口不可能达到规定的流量,在这种工况下,流量优先流向负载小的臂架液压缸。
1.定量泵供油系统
图4-54所示为定量泵供油系统的液压原理图,其中多路阀由控制块4、换向滑阀5~10和终端块11组成。
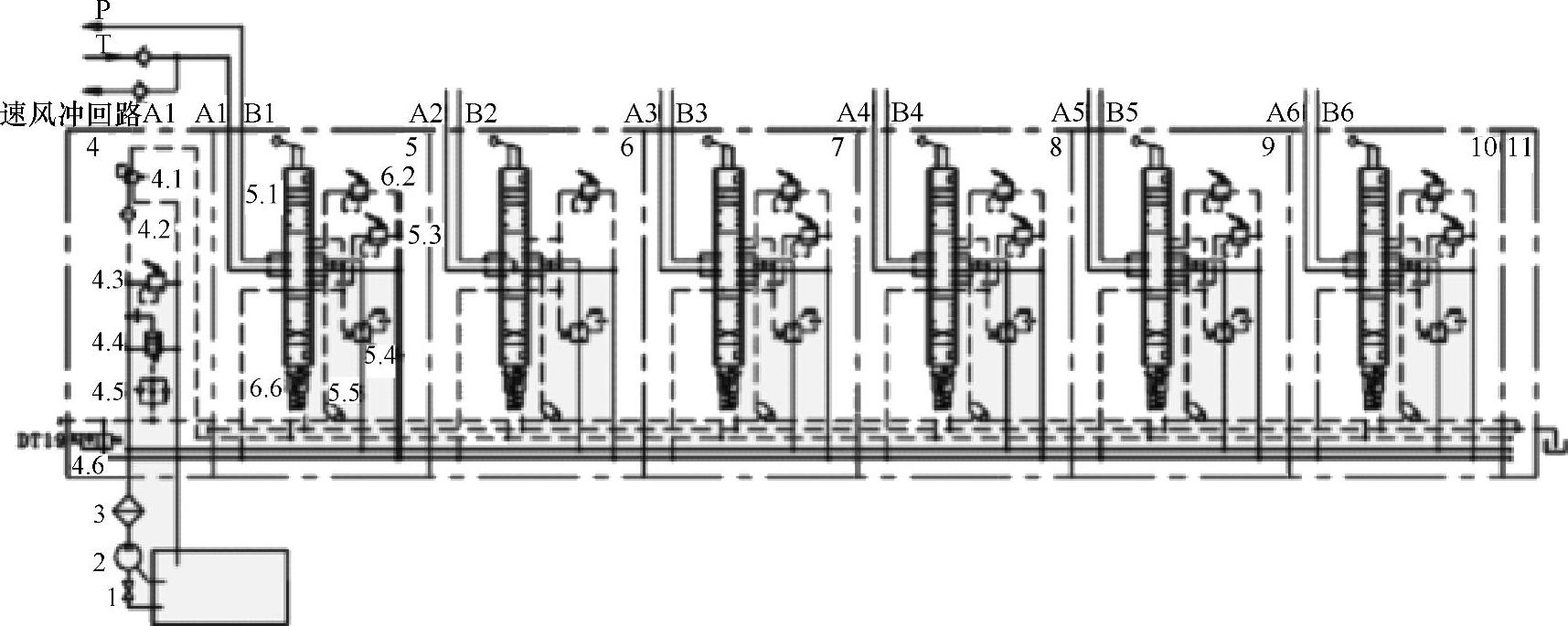
图4-54 定量泵供油系统
9—3#臂架油缸换向滑阀 10—4#臂架油缸换向滑阀 11—终端块 4—控制块 4.1—减压阀 4.2—过滤器 4.3—主溢流阀 4.4—三通流量阀 4.5—阻尼器 4.6—旁通阀 5—换向滑阀 5.1—滑阀阀芯 5.2、5.3—二次溢流先导阀 5.4—二通流量阀 5.5—梭阀 5.6—电比例阀
多路阀控制块4包括减压阀4.1、过滤器4.2、主溢流阀4.3、三通流量阀4.4、阻尼器4.5和旁通阀4.6组成。其中减压阀4.1的作用是为各换向滑阀中的电比例阀提供低压控制油;主溢流阀4.3的作用是调定多路阀的最高压力;三通流量阀4.4的作用是根据各换向滑阀反馈来的最大压力确定其阀芯的位置,从而确定通过其到达各换向滑阀的流量;阻尼器4.5的作用是控制响应的速度和稳定性;旁通阀4.6的作用是控制系统是否带载,当其不得电时,各换向滑阀的动作不会导致输出流量和压力过大。
对于换向滑阀,我们以换向滑阀5来介绍,因为各换向滑阀区别只在于油口额定流量不一致。换向滑阀5包括滑阀阀芯5.1、二次溢流先导阀5.2及5.3、二通流量阀5.4、梭阀5.5和电比例阀5.6。其中滑阀阀芯5.1的作用是决定压力油的方向和对应油口流量的大小,二次溢流先导阀5.2及5.3的作用是决定油口A、B最大压力值,但其只是先导阀,而是通过调节三通流量阀4.4来最终调定压力;二通流量阀5.4的作用是保证滑阀阀芯5.1的进出油口的压差恒定,从而确保输出稳定的额定流量;梭阀5.5的作用是与其他滑阀的梭阀一起将最大的压力油反馈给三通流量阀4.4,从而调节流量;电比例阀5.6的作用是提供电比例控制。
2.带负载敏感阀的变量泵供油系统
图4-55所示为带负载敏感阀的变量泵供油系统的液压原理图,其中多路阀由控制块4、换向滑阀5~11和终端块12组成。
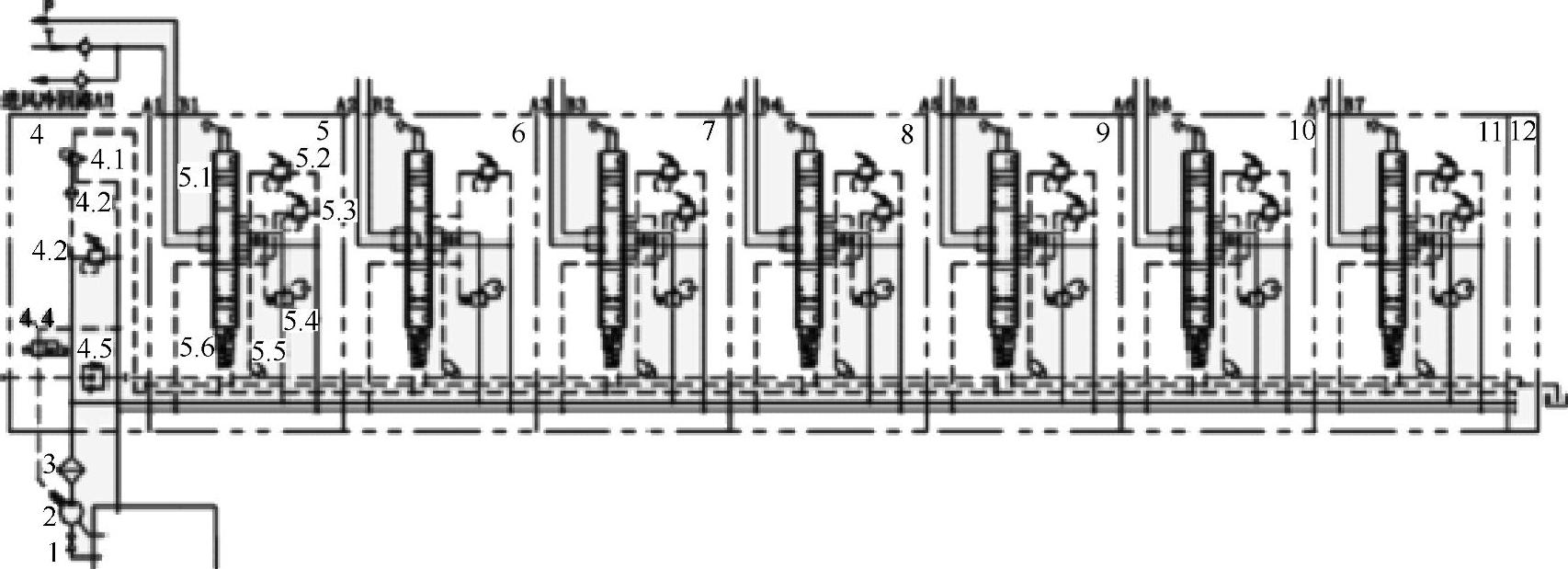
图4-55 带负载敏感阀的变量泵供油系统
1—球阀 2—定量臂架泵 3—高压过滤器 4—控制块 5—支腿换向滑阀 6—回转换向滑阀 7—1#臂架液压缸换向滑阀 8—2#臂架液压缸换向滑阀 9—3#臂架液压缸换向滑阀 10—4#臂架液压缸换向滑阀 11—5#臂架液压缸换向滑阀 12—终端块 4.1—减压阀 4.2—过滤器 4.3—主溢流阀 4.4—旁通阀 4.5—阻尼器 5.1—滑阀阀芯 5.2、5.3—二次溢流先导阀 5.4—二通流量阀 5.5—梭阀 5.6—电比例阀
多路阀控制块4包括减压阀4.1、过滤器4.2、主溢流阀4.3、旁通阀4.4、阻尼器4.5。从中不难看出,它与定量泵系统中多路阀控制块的区别在于无三通流量阀,实际上调节流量的三通流量阀只是与变量泵集成在一体而已。换向滑阀的功能和组成与前面讲过的一样,这里就不再阐述。(www.daowen.com)
(二)臂架变幅回路
如图4-56所示为1#臂架液压缸平衡回路的液压原理图,其中包括平衡阀1、单向阻尼阀2、单向阻尼阀3和1#臂架液压缸4。平衡阀1的作用是在臂架液压缸运动过程中起平衡负载和控制及稳定运动速度,而在臂架液压缸不动作时起液压锁用;单向阻尼阀2和3的作用是调节臂架油缸的运动速度;臂架液压缸4是执行机构,其作用是推动臂架进行变幅。
在这里值得提醒的是单向阻尼阀2.1和2.2必须相同,即其中阻尼孔大小必须一致;而单向阻尼阀3.1和3.2必须相同,这样才能保证臂架液压缸4.1和4.2以相同的速度前进或后退。如果上述两个条件任一不满足,则臂架液压缸4.1和4.2的运行速度就会不一致,而这样的后果是非常严重的,不仅会造成臂架受强大侧向力的作用以致损坏;而且其中的一根臂架液压缸受到另一根臂架液压缸的强大作用力,致使活塞杆失稳而弯曲。
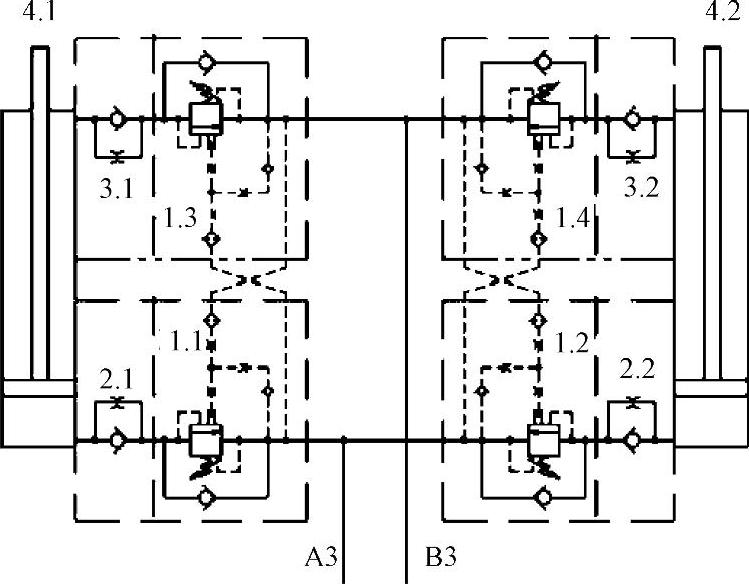
图4-56 1#臂架液压缸平衡回路
1—平衡阀 2、3—单向阻尼阀 4—1#臂架液压缸
(三)臂架回转回路
图4-57所示为臂架回转回路的液压原理图,其中包括回转限位阀组1、回转平衡阀2和回转马达及制动3。回转限位阀组1的作用是限制臂架回转的角度,当臂架左旋或右旋至规定角度时,会触发相应接近开关从而使控制器控制相应的电磁阀断电,则相应的压力油泄回油箱,臂架停止旋转;回转平衡阀2的作用是平衡臂架回转的负载从而控制回转的平稳性;回转马达及制动3的作用是驱动减速机输出臂架回转所需的转矩以及在静止时保证减速机进行制动,不产生意外旋转。
(四)支腿动作回路
图4-58所示为支腿动作回路的液压原理图,其中包括支腿多路阀1、液压锁2和3、各支腿液压缸4~8组成。支腿多路阀1的作用是控制相应的支腿液压缸4~8伸出和缩回,液压锁2和3的作用是在支腿液压缸不动作时锁定相关油路。
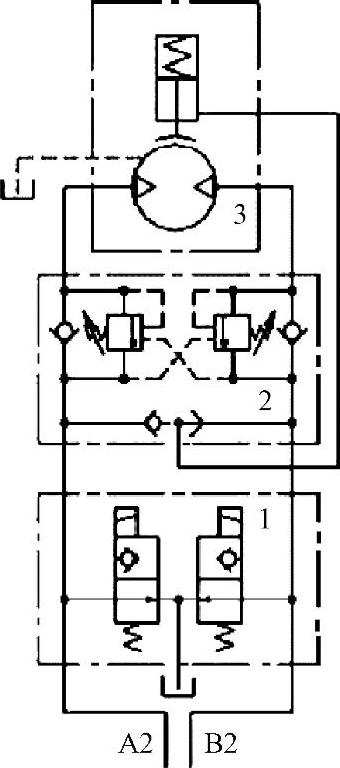
图4-57 臂架回转回路
1—回转限位阀组 2—回转平衡阀 3—回转马达及制动
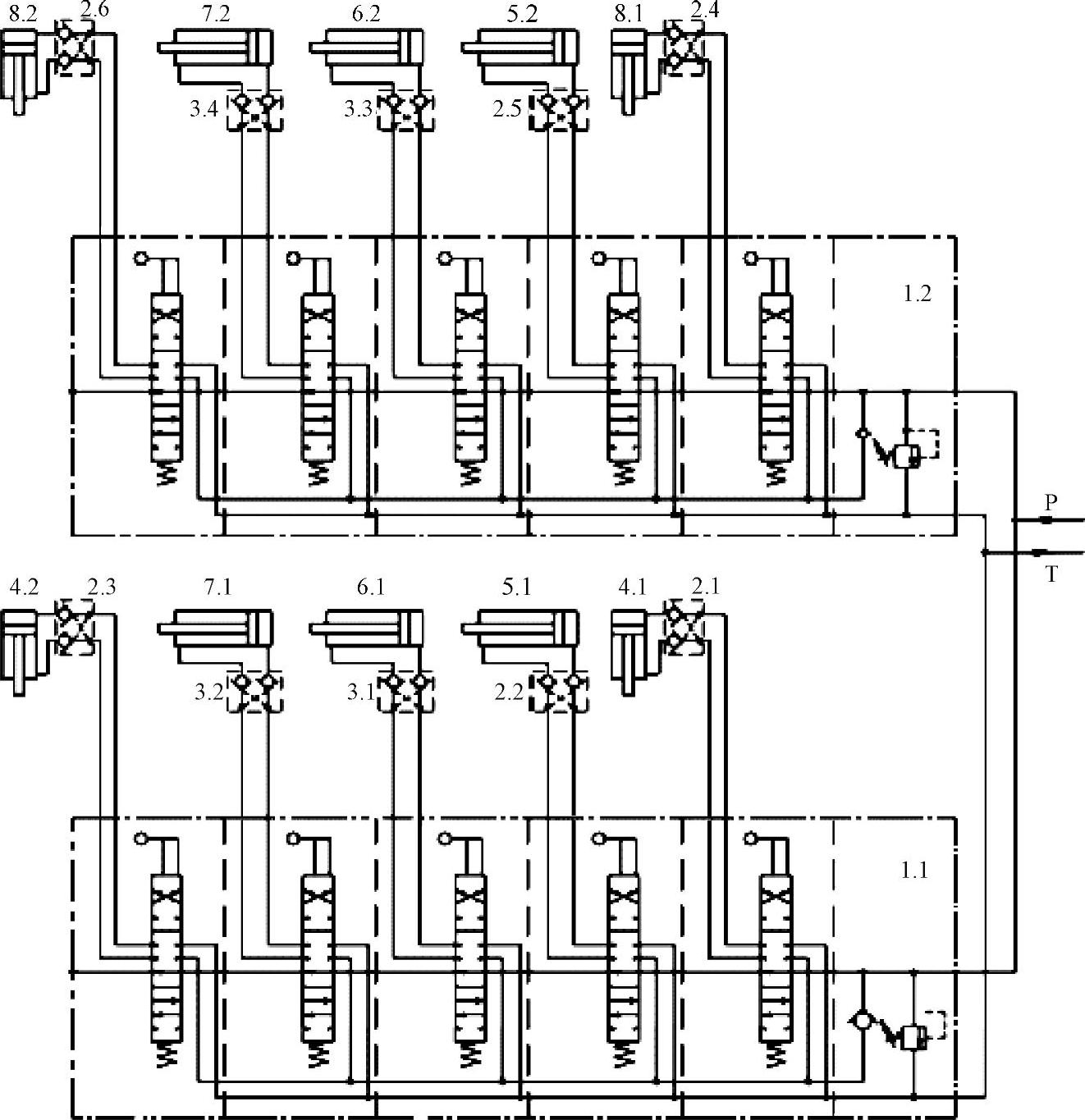
图4-58 支腿动作回路
1—支腿多路阀 2、3—液压锁 4—右支腿下撑液压缸 5—前支腿伸缩液压缸 6—前支腿展开液压缸 7—后支腿展开液压缸 8—左支腿下撑液压缸
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







