采用先导阀作为控制元件的液压系统中,必须使用相应的液控阀。操作先导阀手柄摆动一个角度后,其相应的输出口就会输出一定压力的控制油,作用在液控多路换向阀某阀杆的一端。通过与该阀杆复位弹簧共同作用使阀杆保持在一个相应的开口位置,从而对高压油进行流量控制后到达执行元件,实现对工作装置的速度与作用力的控制。这种控制的优点是操作舒适、动作灵敏、微动性好。
1.T165—2型工作装置液压系统
T165—2型推土机的工作装置液压系统主要包括先导操纵阀、液控式多路换向阀、选择阀、定量齿轮泵、液压缸等液压元件,系统原理图如图3-33所示。
该机配置的多路换向阀的铲刀控制阀片为Q型阀,浮动位由图3-33中四位Q型换向阀14的最右位实现。先导操纵阀建立二次压力推动多路换向阀阀杆的二级弹簧,从而实现下降位与浮动位的切换。先导阀相对应的控制口加了浮动位机械锁定机构。选择阀的功能是实现发动机停车后铲刀能够降落到地面,并且保证由工作装置自重在液压缸中产生的高压油经该阀到先导阀的压力保持在1.05MPa以下。
在产品试制初期,发现这套系统的控制存在一定的不足。先导阀控制下的换向阀的启动性与调速性都比较差,在操纵先导阀手柄后,换向阀不能进行小开口控制和微动调节,当操作手柄到达某一位置时换向阀突然开启而直接达到中开口位置,使得铲刀动作不易控制,作业质量低。
2.问题分析
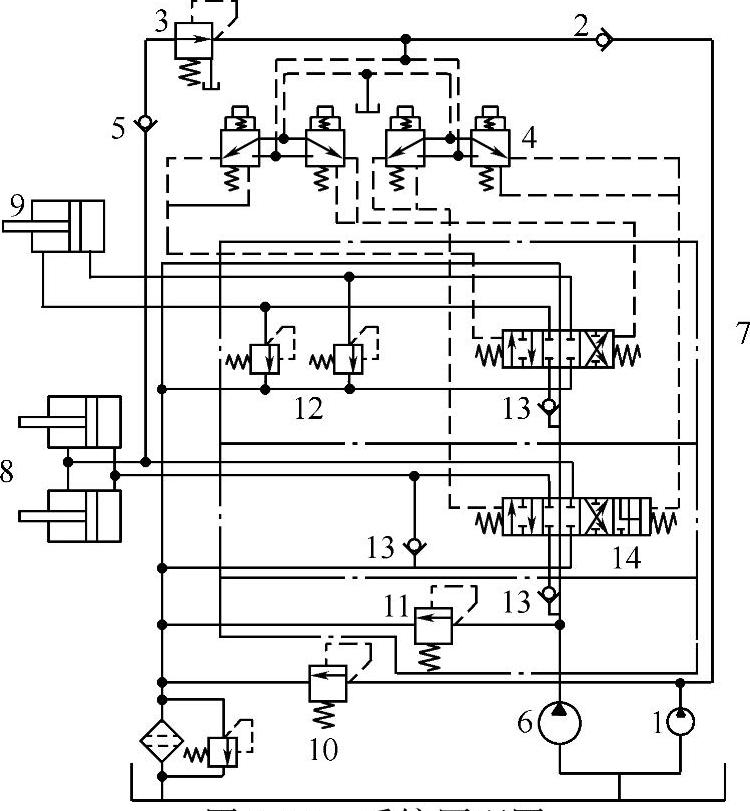
图3-33 系统原理图
1、6—液压泵 2、5、13—单向阀 3—选择阀 4—BJS先导阀 7—换向阀组 8—提升液压缸 9—侧倾液压缸 10—溢流阀 11—安全阀 12—过载阀 14—四位Q型换向阀
1)多路换向阀的阀杆受力分析。在阀杆启动过程中受到的作用力为
pS=Ff+F1+Fa
式中,p为先导阀输出的控制油压;S为多路换向阀的阀杆截面积;Ff为多路换向阀的阀杆与阀体之间的最大静摩擦力,由阀杆与阀体材质、润滑情况、加工精度等因素决定;Fa为阀杆启动过程中的瞬间液动力,与阀杆移动的速度有关,即仅与阀口开度的变化率有关;F1为多路换向阀阀杆的复位弹簧力。
F1=Δl·k+F0
式中,F0为复位弹簧力的预紧力;k为复位弹簧力的弹性系数;Δl为阀杆从中位到某一开口量的位移。
从式中可以看出,先导油压对阀杆的作用力pS与复位弹簧力F1、最大静摩擦力Ff、瞬间液动力Fa均成线性关系,在同一先导油压下改变等式右边任一项均可影响到换向阀阀杆开口量。
当采用定量泵供油时,阀杆节流配合安全阀溢流来实现调速的液压回路中,执行元件的速度主要取决于多路阀阀杆的位移情况,而多路阀阀杆的动作由上述几个因素决定。经分析,先导阀与多路换向阀不能很好地匹配。在以先导油液作为控制介质的油路中,先导控制油靠逐渐建立起来的压力去克服弹簧力的作用,一方面没有机械连杆直接的力反馈感觉,另一方面没有机械连杆中手柄摆角与多路换向阀阀杆位移之间直接对应关系。这样在操纵阻力很小的情况下,操纵手柄会轻易摆动到较大摆角,此时对应的先导油压升高到一定程度,克服了弹簧力,会使阀杆突然移动而“释放”。其结果是由先导阀手柄给定的位置决定了阀杆在一开启就处于中开口位置。(https://www.daowen.com)
从式中可以看出,等式的右边由三项组成,根据等式的特性,如同时增大等式左边项与等式右边的某一项后,两者的相互关系受到其他项的影响就会变小。
因此提高先导油液的作用压力,同时相应提高复位弹簧力,可使两者更好地匹配。
2)先导阀调压柱塞的受力分析。先导阀调压柱塞的受力为
pS1=k1·Δl1
式中,p为先导阀输出的控制油压;S1为调压柱塞的面积;k1为调压弹簧的弹性系数;Δl1为调压柱塞的位移,与操纵手柄的摆动角度成正比。
考虑到调压柱塞的配合段较短,几何加工精度等各方面对其影响较小,不会出现诸如多路换向阀阀杆的爬行现象,不会对先导阀的输出压力产生大的影响,另一方面实际情况要求先导阀具有一定的操作阻力,故上式中的摩擦阻力可以忽略不计。
综上所述,先导阀的输出压力决定于调压柱塞的移动量即操纵手柄的摆动角度。
3.改进后的情况
对于具有Q型机能的四位阀来说,实现铲刀的上升与下降所需要的一次压力,先导阀对其输出的压力范围在0.5~0.96MPa之间;而为实现浮动位,先导阀对其输出的二次压力的范围在1.12~1.33MPa。可以看出,关系到换向阀的启动性与调速性的一次压力调压范围比较窄,仅为Δp=0.46MPa。
经过反复试验,把Q型换向阀的复位弹簧钢丝直径由ϕ4mm提高到ϕ4.2mm,而自然长度不变,在提高了刚性的同时也增加了弹簧的预紧力,同时相应提高了先导阀柱塞调压弹簧的弹性系数。
经过改进后,一方面把多路换向阀由铲刀下降位到浮动位的转换压力点提高到1.7MPa左右,加宽了下降位的控制范围,变化范围在0.55~1.4MPa之间,相应地增大了先导阀操作手柄摆动范围,提高了先导操纵微动性。另一方面是该压力点的提高,使得由铲刀下降位到浮动位的转换范围由0.96~1.12MPa改变为1.40~1.70MPa,使得浮动位的操纵感觉更明显。由于先导阀操作手柄总成上安装了机械定位机构,机构在定位过程中需要一定的行程,占据了操作手柄摆动角的一部分,故调压范围有一段不可用。表3-8为改进前后数值的对比。
表3-8 改进前后的先导油压与弹簧力

经上述改进后,先导阀与多路换向阀的匹配性得到很好的改善。换向阀的启动性有所提高,铲刀的微调动作基本上满足了设计要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





