1.开中心系统和闭中心系统
按多路阀中位的形式可分为开中心系统和闭中心系统。即:①开中心系统是指当换向阀阀芯在中位时,液压泵的排油通过换向阀的中位直接回油箱。当阀芯换向时,中位油路逐渐关闭,工作油路的压力逐渐升高,直到克服负载压力,使执行元件动作。它是通过回油节流产生的压力克服负载压力,因此调速特性受负载压力和液压泵流量的影响。负载较轻时,操纵性能较好,调速范围大。但随着负载的增加,调速范围变小,调速特性曲线变陡,导致操纵阀开口稍作变化,流量变化就很大,阀的调速稳定性能变差。且当一个液压泵给多个执行元件供油时,流量总是流向轻负载的执行元件,故影响复合动作的稳定性。②闭中心系统是指当换向阀在中位时,油路是封闭的,液压油不直接回油箱,液压泵只提供系统内部泄漏所需的流量。当阀芯换向时,液压油才流向执行元件,这样就避免了开中心系统所固有的旁路回油损失。闭中心系统的优点是进行复合动作时,每个执行元件的速度只与阀芯位移有关,与负载和液压泵的流量无关,多个执行元件之间相互无干扰。
2.按反馈控制方式分类
按反馈控制方式的不同,有分功率控制、总功率控制、交叉功率控制、正流量控制、负流量控制、负荷传感控制等。
1)分功率控制只是简单地将两个恒功率液压泵组合在一起,两个泵调节器只对自身泵起作用。优点是两个液压泵的流量可以根据各自回路的负载单独变化,对负载的适应性较好。缺点是当其中一个液压泵工作于起调压力之下时,另外一个液压泵不能吸收柴油机空余出来的功率,使柴油机功率得不到充分利用,因此这种系统在国外大、中型挖掘机上基本被淘汰。
2)总功率控制是指两个泵的功率的总和保持不变,功率调节器同时调节两泵的排量,使两泵输出的流量相等。随着负载的变化,两泵的压力可以不同,两台泵的输出功率也就不同。总功率控制可以充分利用发动机功率,但由于两个系统的排量一致,当挖掘机做单一地动作时,其中一个泵就会输出多余的流量,造成系统发热和功率损失。因此总功率控制通常与其他控制结合起来,如负流量控制、正流量控制等。
3)交叉功率控制是一种特殊的总功率调节,与总功率控制不同之处在于两个液压泵的排量可以不同。通过交叉连接,使每个液压泵的输出流量与其自身和另一个泵的出口压力有关。交叉功率控制既能根据每个液压泵的负载大小调整其流量,又能充分利用柴油机的功率。
4)正流量控制是指将操纵阀的先导压力作为控制压力来控制泵的变量机构,随着控制压力的升高,变量泵的排量变大。正流量控制在调速性、系统效率等方面有了很大程度的提高,但正流量控制需要一些梭阀,结构比较复杂,尽管流量取决于需求,但也受负荷压力的影响。(www.daowen.com)
5)负流量控制是指将多路阀中位回油的流量作为一种控制信号作用于泵的变量机构,使控制压力与泵的排量呈反比关系的一种控制方式,其原理如图1-1所示。这种系统可以通过流量检测装置检测到多路阀中位回油的流量,反馈到变量泵的流量调节机构,对减小能量的浪费起到一定的作用。但阀口的流量特性受负载的影响,旁路回油压力的大小直接影响系统的操作性。当泵的空载输出压力较低时,在多路阀离开中位时,因为负载压力的影响旁路回油流量没有明显地减少,流量检测元件不能检测到明显的流量变化,所以泵的响应速度降低,造成系统刚性差,司机操作时有滞后感。
6)负荷传感是指系统能自动地将负载所需的压力和流量变化的信号传到负载敏感阀或负载敏感泵的变量控制机构,使其流量发生变化,仅向系统提供负载所需要的流量,最大限度的减少压力与流量的损失,其原理如图1-2所示。负荷传感控制能使泵的输出压力和流量自动适应负载需求,大幅度提高液压系统效率,其节能效果显著。流量控制精度高,不受负荷压力变化的影响。为保证系统正常工作,泵输送的压力只能与最高负荷压力相适应。但是当系统要求的流量超过泵供油能力的极限时,最高负荷回路上的执行元件的速度会迅速降低直至停止,从而使挖掘机失去复合动作的协调能力。为解决这一问题,力士乐公司开发了LUVD系统,这种系统在多路阀后加流量分配型压力补偿阀。系统最高负载压力传递给所有的压力补偿阀,使多路阀所有的输出压力都限定在统一的最高压力之下,从而使多路阀的各阀口压差相等。因此即使泵的输出流量不足,无法维持多路阀上正常的负荷敏感压差。但在溢流型压力补偿阀的作用下仍然可以使各个阀口压差保持一致。此时,虽然各个执行机构的运动速度降低,但是各运动速度的比例关系保持不变。
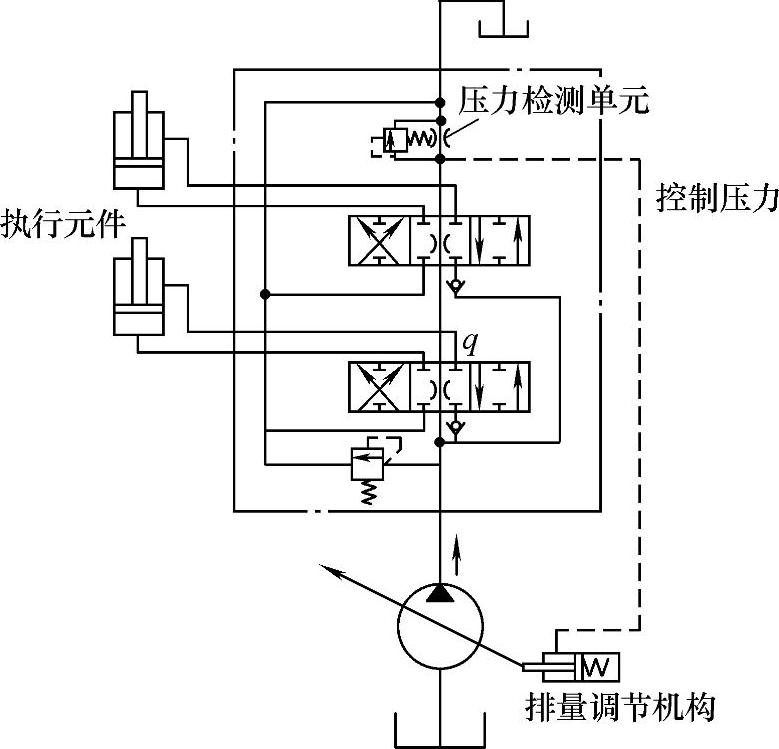
图1-1 负流量控制系统原理图
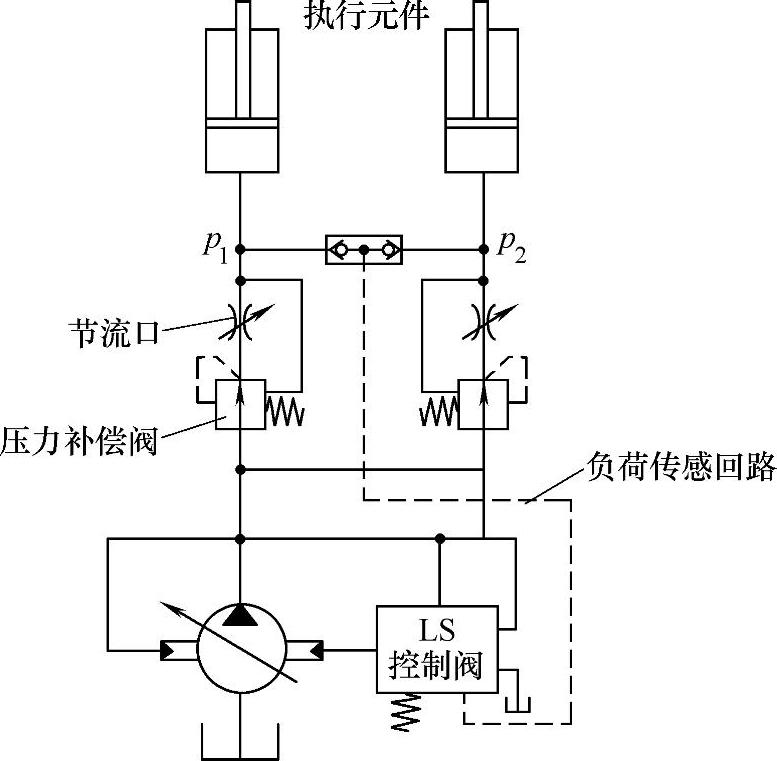
图1-2 负荷传感系统原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





