系统的硬件电路是在对系统控制过程和CAN/LIN总线原理有充分认识和了解基础之上,并对需采用的芯片认真选取以后进行设计的。以下是系统整体硬件设计介绍。
9.2.2.1 基于总线的车身系统控制方案
车身控制模块的控制功能很多,其中包括遥控中央门锁和防盗、电动车窗玻璃升降器、内外灯、刮水器、后窗和后视镜加热控制、电动座椅和空调等。为了达到舒适、安全和方便的目的,同时随着车上网络技术的发展,集成了上述功能的全部或部分的车身控制模块逐渐应用于高档轿车中。
在一般设计中,通常采用通用模块化软、硬件设计思想,所有节点采用相同的硬件电路。设计方案包括5个CAN总线控制节点和4个LIN总线控制节点,如图9-10所示。其中,左前门节点、右前门节点、左后门节点、右后门节点和中央控制器节点构成了CAN;左、右前灯及左、右后灯和中央控制器节点构成了LIN,另有一个在线监测和控制节点用来监测该网络,并用故障诊断仪通过K线协议(ISO9141—1989标准)与中央控制器通信,以实现对该车身控制器局域网进行故障诊断。
CAN 4个门节点的主要功能是控制相应玻璃窗升降器、门锁等。其中左、右前门节点还将控制左、右后视镜电动机,左前门节点还能控制其他3个门节点的玻璃窗升降器及集控门锁功能。而中央控制器主要负责总线休眠功能、各种控制的信息转换传输及行李箱锁芯电动机的控制。
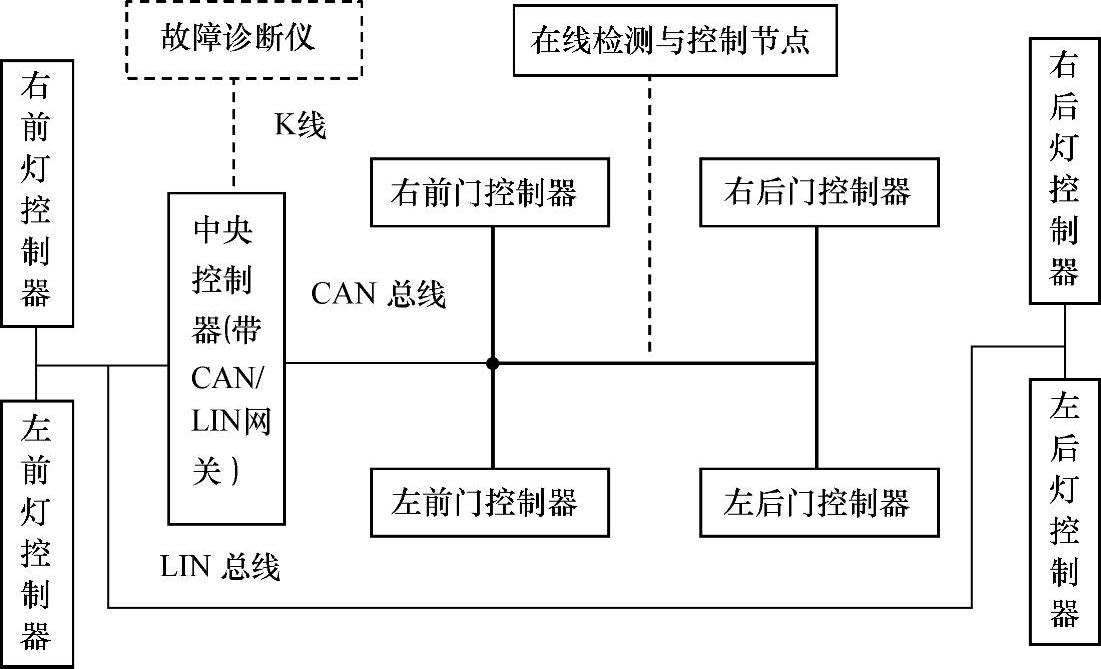
图9-10 系统设计方案
LIN 4个车灯系统构成的节点主要接收来自CAN的信息帧,并通过LIN对车灯进行相应的控制,这是本节讨论的重点。
4个车灯节点构成LIN车灯控制系统,中央控制器作为网关,它在CAN总线和LIN总线之间以使CAN和LIN总线相连通。这样,中央控制器成为整个网络的控制枢纽,它可以将控制命令转发到LIN中,实现对车灯系统的控制。
设计中采用LIN总线实现车灯控制使得整个车身网络层次分明,在一定程度上降低了车灯控制节点的成本。
车灯控制系统作为CAN/LIN的控制对象,主要由轿车车身外部各类车灯所组成。
1)前后车灯包括:大灯(90W)、小灯(55W)、前转向灯(21W)和雾灯(21W);后转向灯(21W)、制动灯(21W)、尾灯(5W)、倒车灯(21W)和雾灯(21W)。
2)需要实现的车灯控制功能包括:雾灯控制、尾灯控制、大灯控制、小灯控制、倒车灯控制、制动灯控制、报警控制等。
转向控制时相应侧的转向灯闪烁;报警控制时6个转向灯同时闪烁,此时转向控制不起作用;示廓控制时6个转向灯同时保持打开状态,但不闪烁。
表9-2列出了某款车型中各个车灯的功率和所采用的功率开关类型。
表9-2 车灯的功率和所采用的功率开关类型
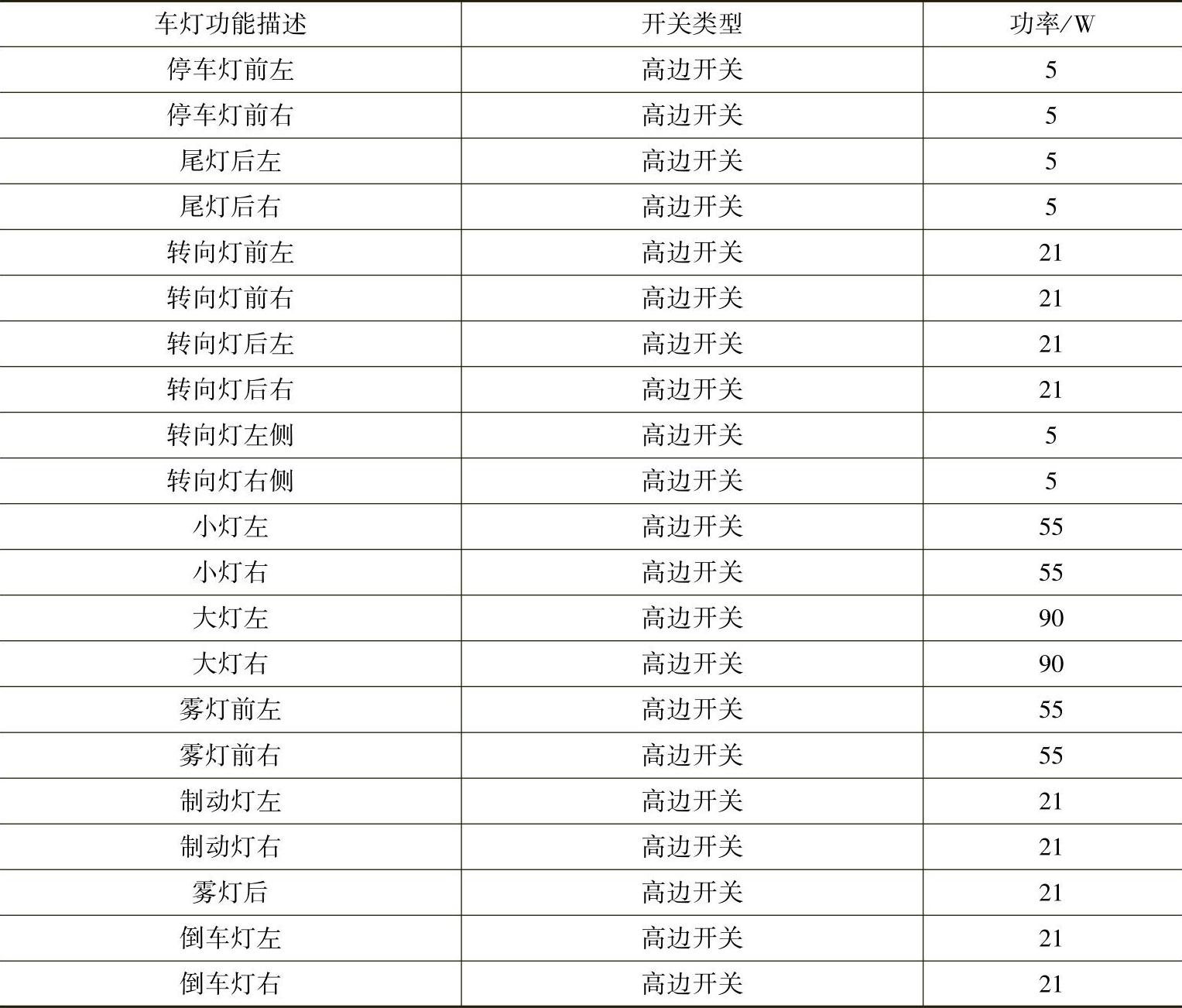
车灯的开关类型为高边驱动是指半导体功率开关的一端接电源,另一端接负载;半导体功率开关的一端接电源,另一端接负载,而负载的另一端接地。
9.2.2.2 CAN主节点硬件电路(www.daowen.com)
网络中的节点即信息的接收与发送站点。简化的CAN节点是一个单芯片,可以直接将采集到的引脚电平或A/D信号转化为CAN报文远程传送,在网络中充当一个网关。这种装置对于驱动远程执行器或采集数字量或模拟量都非常理想,它们能够被看作中央微处理器的远程附件。多数应用系统中的CAN节点采用独立CAN控制器与微处理器接口,或采用集成CAN控制器的微处理器。常用的独立CAN控制器有SJA1000/82C200和CC750/CC770等。由于CAN被广泛应用于基于微处理器的系统中,所以多数微处理器生产厂商都开发了具有CAN控制器接口的微处理器芯片,把CAN控制器以接口形式直接集成在微处理器中,应用时避免了硬件上的设计。嵌有CAN协议的微处理器产品主要有C167/C515C、AN87C196、MC68HC08GZ16、TMS320LF2406和P8XC592/8等。这里选用带有嵌入CAN协议的MC68HC908GZ16芯片,选用该控制器不仅要作为CAN的一个节点,同时还作为连通CAN/LIN总线的网关,因此在模块设计中,主要用到MC68HC908GZ16控制器的两部分资源:MSCAN08模块和ESCI模块。MSCAN08模块的主要任务是与车身控制中的其他低速CAN节点进行通信,从而形成完整的控制系统。ESCI模块的主要任务是将CAN信息转换成LIN总线信息格式发送到LIN总线上,由此完成CAN/LIN网关的任务。另外还要用到的芯片主要有LT1121-5电源、PCA82C250CAN收发器和MC33399LIN物理接口。电源芯片主要为MC68HC908GZ16和PCA82C250提供电源。PCA82C250和MC33399分别用于CAN信号和LIN信号电平的转换。综上所述,CAN主节点硬件电路设计的结构框图如图9-11所示。
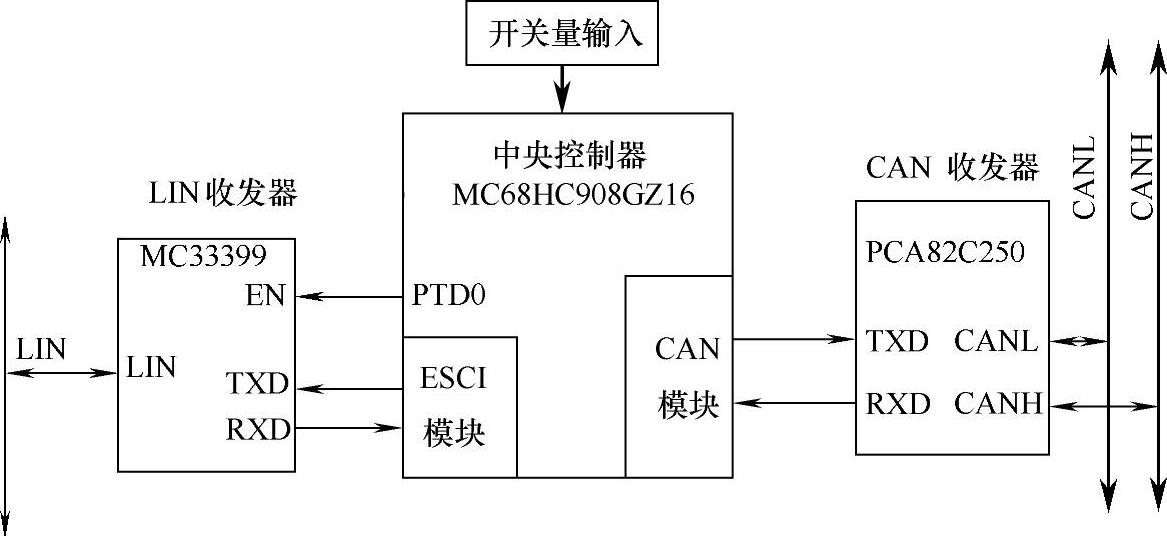
图9-11 CAN主节点结构框图
CAN主节点硬件采用模块化设计,在主机单元框图中,控制器接收来自车身控制系统中ECU的控制信息,同时将该节点的输入开关量通过CAN收发器发送到CAN总线上,以反映本节点的情况。作为网关,当收到来自ECU的信息后,要将该信息转换成LIN信息再发送到LIN总线上,完成信息的传递。具体的硬件原理电路如图9-12所示。图9-13是车灯系统中CAN主节点及CAN/LIN网关实际电路板。
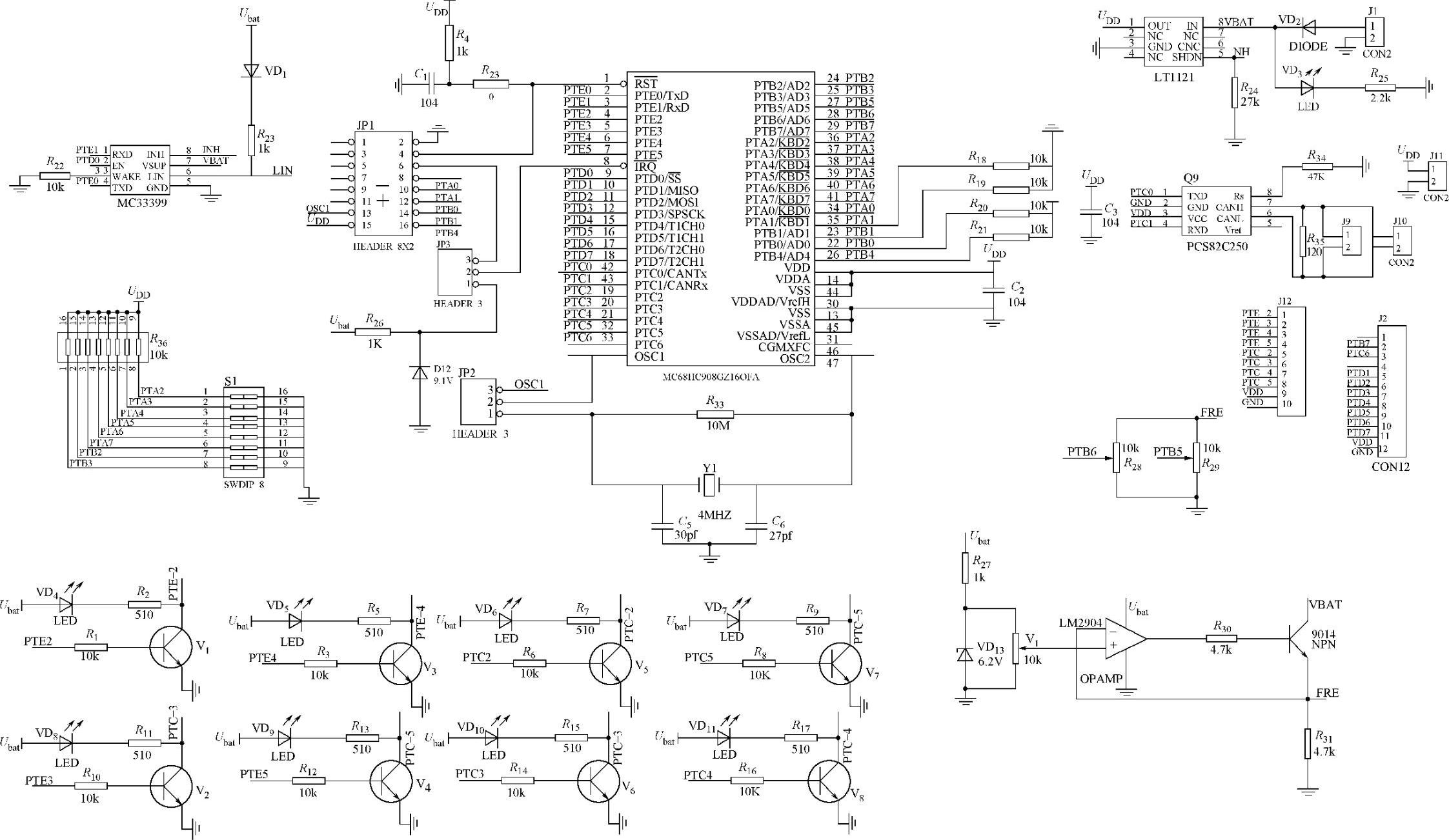
图9-12 CAN主节点电路原理电路
图9-13 CAN节点电路板
9.2.2.3 LIN从节点硬件电路
由于车灯控制系统中4个灯控模块的功能几乎相同,只是在功率开关的数量上和驱动电流的大小上有所不同,所以4个车灯模块的工作原理相同,硬件电路结构相近。
车灯控制系统LIN从节点设计中,所用的主要芯片有MC68HC908QL4、MC33286、LT1121-5和MC33399。MC68HC908QL4是一个8位的微处理器,它主要负责接收符合本节点要求的LIN信息,同时根据接收到的信息要求通过功率驱动芯片对车灯进行控制。MC33286是专门用于车灯驱动的功率芯片,其输入与TTL电平相兼容,可以直接由微处理器进行控制,共有四路输出,OUT1和OUT2由IN1控制,OUT3和OUT4由IN2控制。电源电压为12V时,可以驱动21W和5W功率的车灯。MC33399是LIN总线收发器,将LIN逻辑信号转化成物理电平;LT1121-5为系统提供5V的电源。
车灯控制中LIN从节点的功能主要包括两方面,一方面接收来自主节点的控制信号,完成解码,获得控制信息;另一方面完成对车灯的驱动控制。图9-14是车灯控制系统LIN从节点电路原理图,图9-15是从节点的结构框图。实际电路板如图9-16所示,该电路板面积只有14cm2,能同时驱动4个车灯,与传统的控制方式相比既节省了空间,又提高了可靠性,这也是采用LIN总线进行低速控制的重要原因之一。
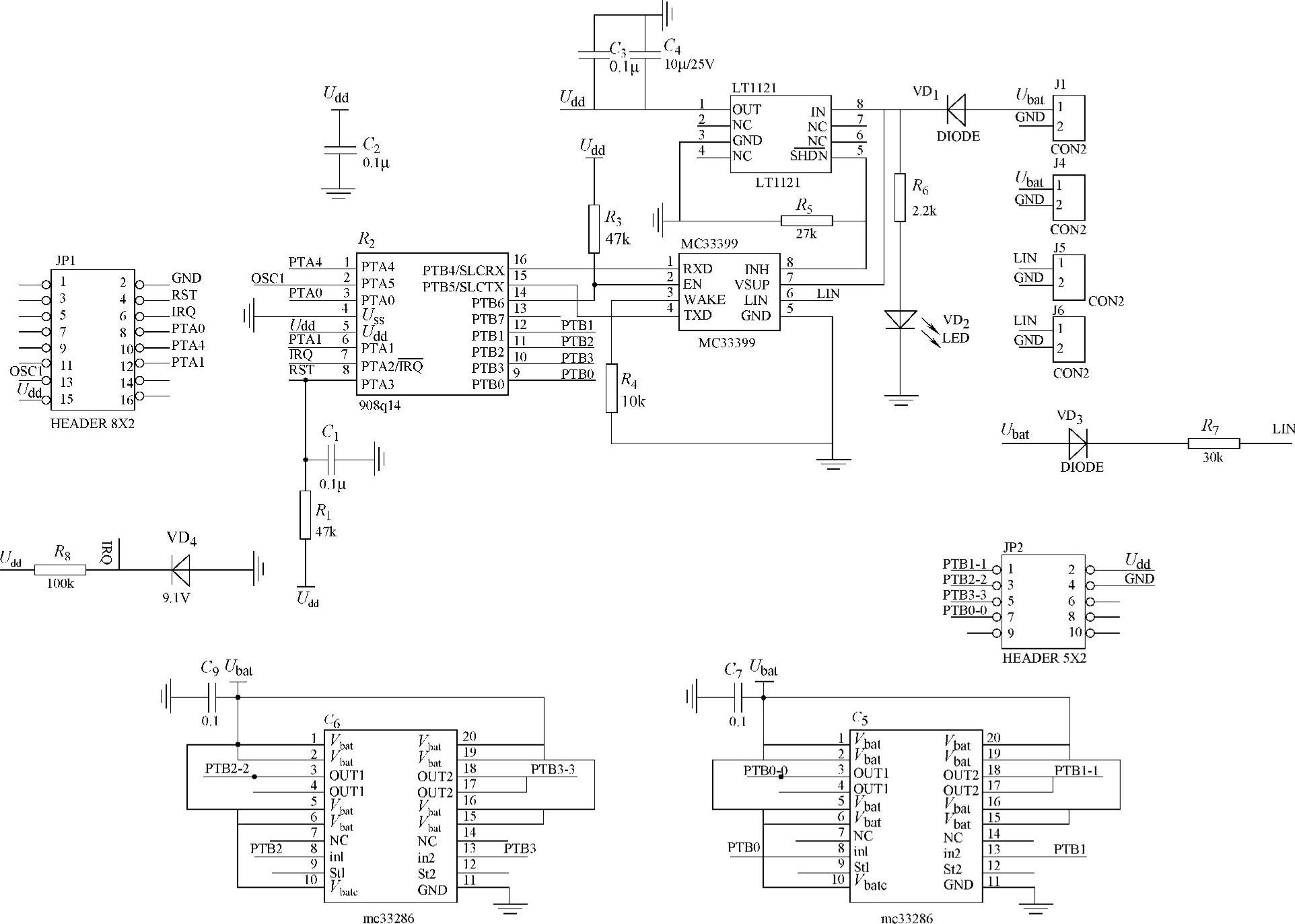
图9-14 LIN从节点电路原理图
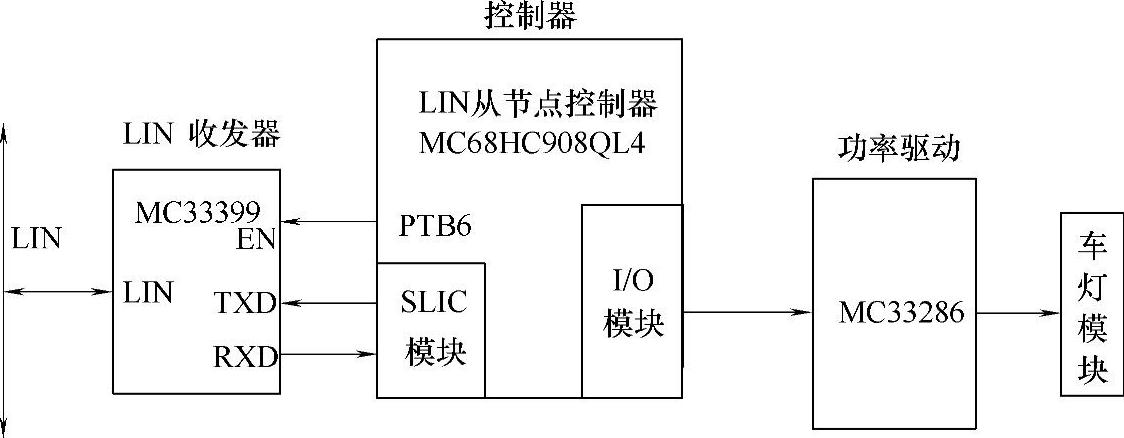
图9-15 LIN从节点结构图
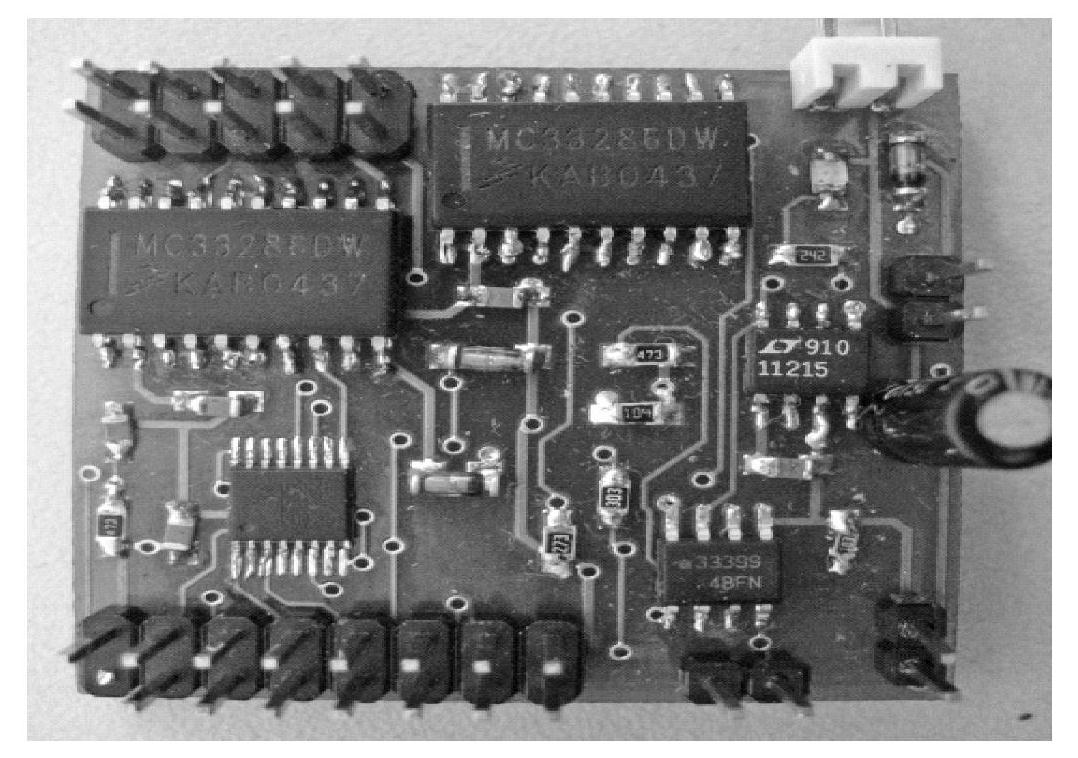
图9-16 LIN节点电路板
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





