8.3.5.1 电动助力转向系统软件设计的概括
前面进行了电动助力转向系统的硬件设计,硬件是系统功能实现的载体:这些是控制系统的灵魂部分。但是这些硬件设备与控制策略如何结合起来完成既定的目标控制最终还是归结于系统软件的控制。因此,系统软件的设计在整个控制系统的设计过程中占据着比较重要的地位。
本小节将从控制系统软件的基本组成环节谈起,最终建立系统整体的软件框架结构。其中主要包括电动机转子方向的判断设计、助力判断流程设计,软件滤波设计、电动机控制等环节。
8.3.5.2 判断电动机转子方向子程序
电动机在正式投入工作之前,必须确定电动机的正反转情况,从而确定提供辅助力的方向。助力方向判定的依据主要是根据方向盘转动角速度的方向和当前的控制方式,当前的控制方式由扭矩值和方向盘转角来决定,其流程图如图8-7所示。
8.3.5.3 助力计算子程序
辅助力计算子程序是依据前面介绍的辅助力匹配模式所确定的助力幅度,经微处理器运算处理后,确定下来希望电动机提供的辅助力的大小,并通过占空比查询表确定出需要占空比数值,将此值赋给PWM占空比输出寄存器,从而控制电枢两端的电压。辅助力计算的流程图如图8-8所示。
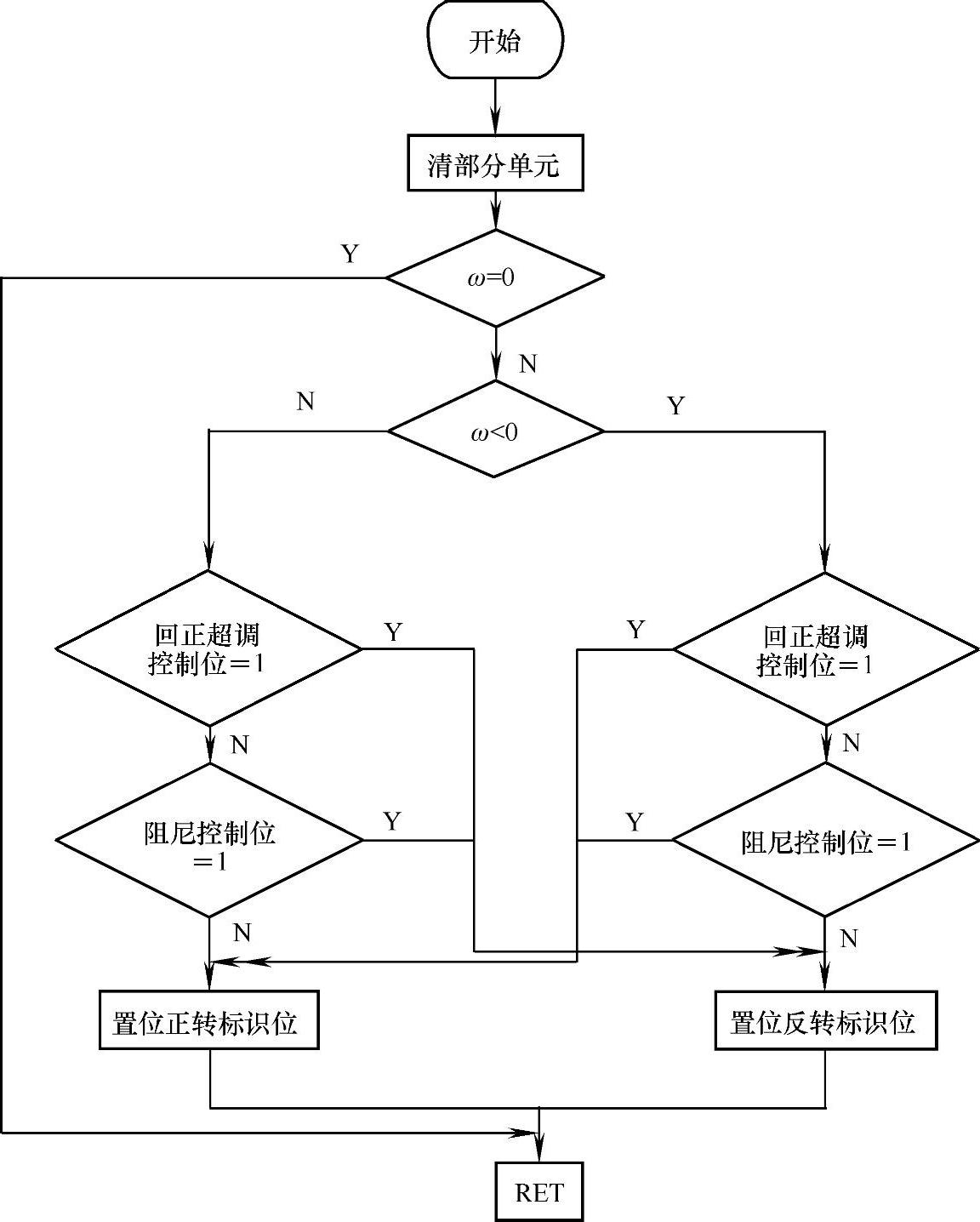
图8-7 判断电动机转子方向子程序流程图
助力计算流程首先是从助力控制方法的判定开始的,通过θ*ω的正负来判断方向盘是处于升程过程还是回程过程。当θ*ω>0时,方向盘处于升程过程;当θ*ω<0时,方向盘处于回程过程。方向盘在升程过程中,就是不断增加方向盘转角的过程,在这个过程中施加的主要是基本助力控制,当侧向加速度达到一定的数值时(如0.1g),侧向加速度反馈控制开始起作用。方向盘处于回程过程中,通过对方向盘转角和测得的转矩的监控来判断系统欲施加的控制方法。最后通过查表确定助力电流的大小。
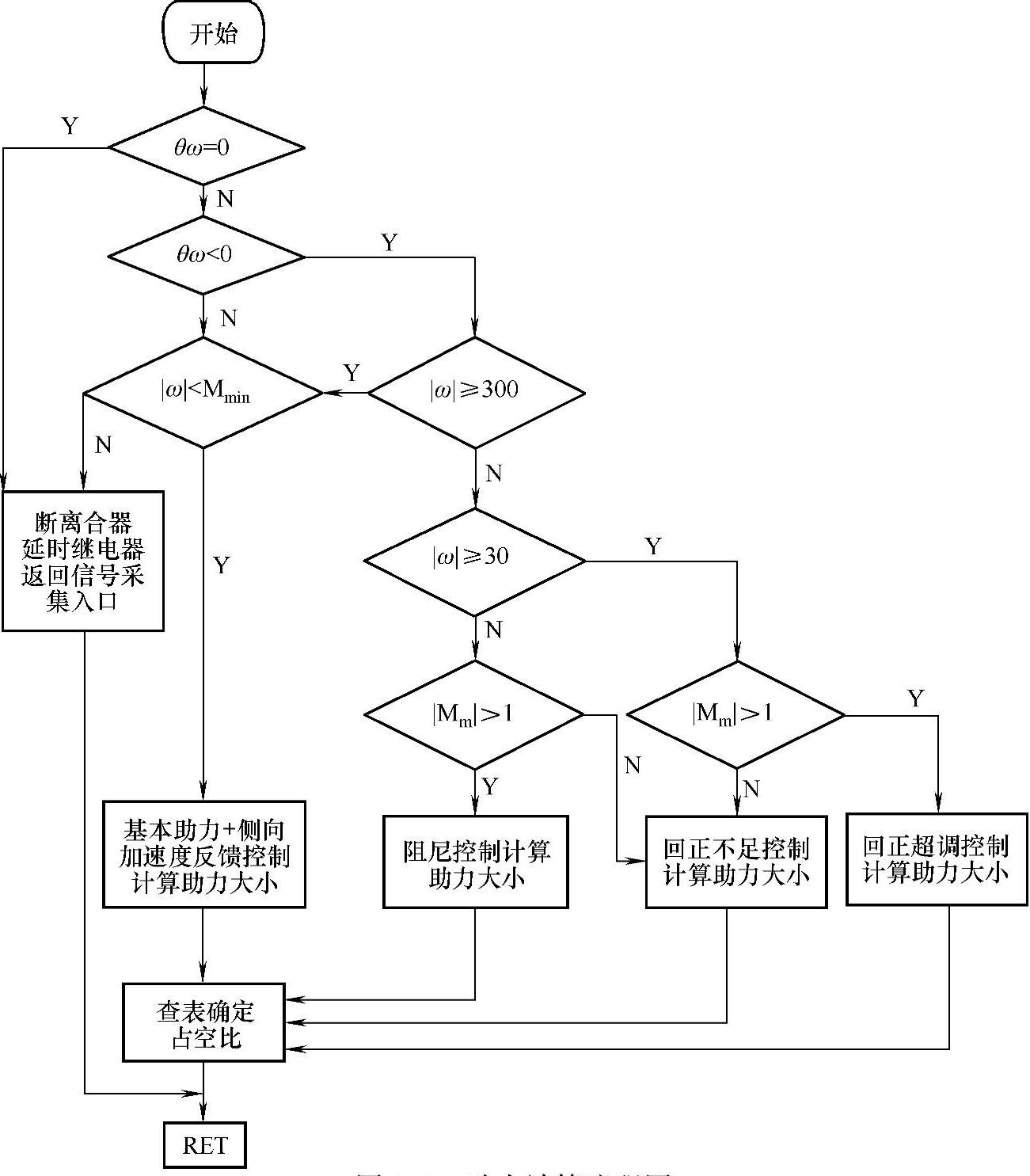
图8-8 助力计算流程图
8.3.5.4 侧向加速度反馈的基本助力计算流程
侧向加速度反馈的基本助力计算流程如图8-9所示。
侧向加速度反馈控制的基本助力计算分为3种情况来进行:
1)当侧向加速度小于最低起始控制值amin时,系统完成基本助力控制后不进行此环节的修正控制。
2)当侧向加速度大于最低起始控制值amin,且小于车辆处于稳态临界状态时的侧向加速度值amax,系统完成基本助力控制后需进行此环节的修正控制,把修正后的结果作为最终控制结果。
3)当侧向加速度大于车辆处于稳态临界状态时的侧向加速度值amax,系统从助力模式转为主动阻尼模式,从而加大驾驶员操纵方向盘的负担;防止车辆从稳定可控状态转入不稳定状态。
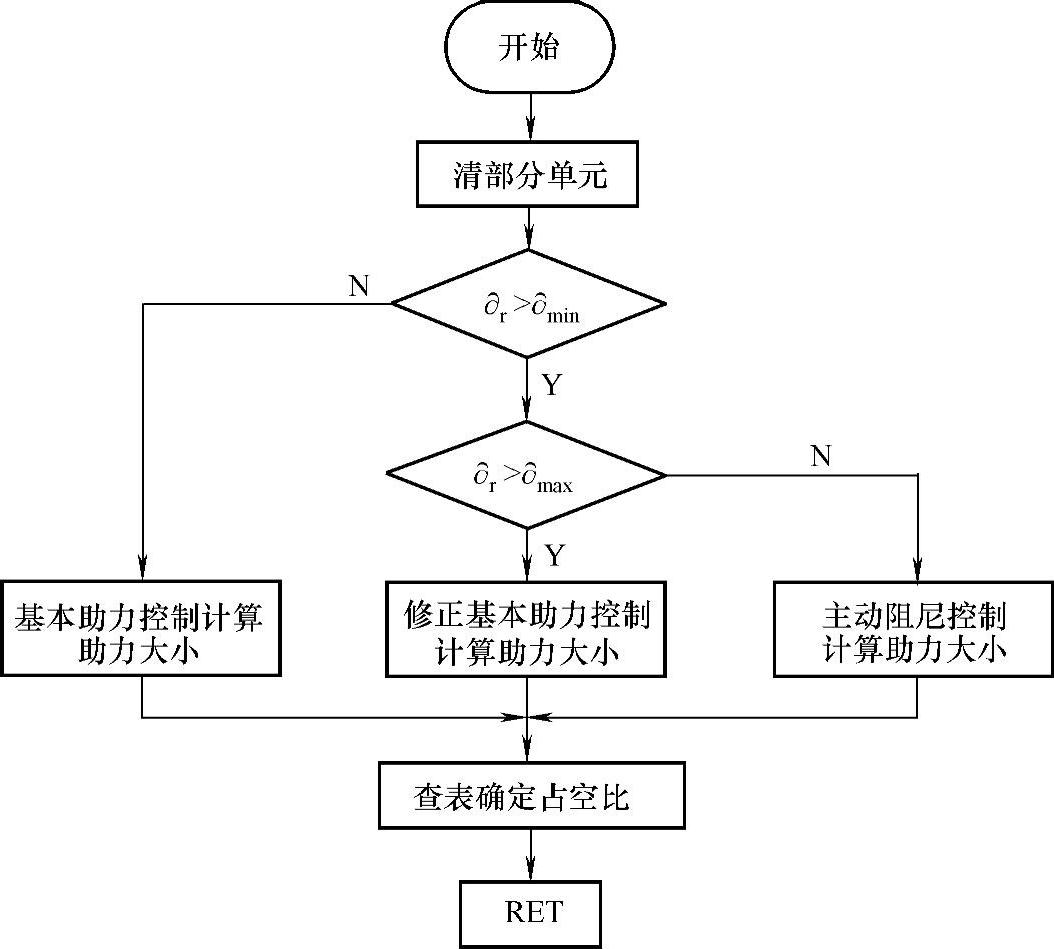
图8-9 侧向加速度反馈的基本助力计算流程图
8.3.5.5 数字滤波
一般微机应用系统的输入信号中,均含有各种噪声和干扰。为了正确地进行测量和控制,必须消除被测信号中的噪声和干扰。在硬件措施上常采用有源或无源RLC网络,构成模拟滤波器对信号实现频率滤波。但干扰不可能通过硬件措施完全消除掉,在信号数据进入计算机正式使用之前,还需要通过适当的数字滤波取得更好的抗干扰效果。数字滤波就是在软件中对采集到的数据进行消除干扰的处理。数字滤波尤其适用于硬件滤波难于消除的低频干扰和周期性波动干扰的场合。数字滤波的方法有很多种,但在电动助力转向系统中有针对性地选择了防脉冲干扰的去极值平均数字滤波方法,考虑到系统实时性的要求,对信号连续采样6次,其结果为S1,S2,…,S6;取

式中 Cn——第n次采样时滤波器的输出。(https://www.daowen.com)
具体数字滤波子程序的流程如图8-10所示。
8.3.5.6 电动机起动的控制
电动机起动控制的目的是:
1)要保证不使电动机的起动冲击电流过大,损害电动机;
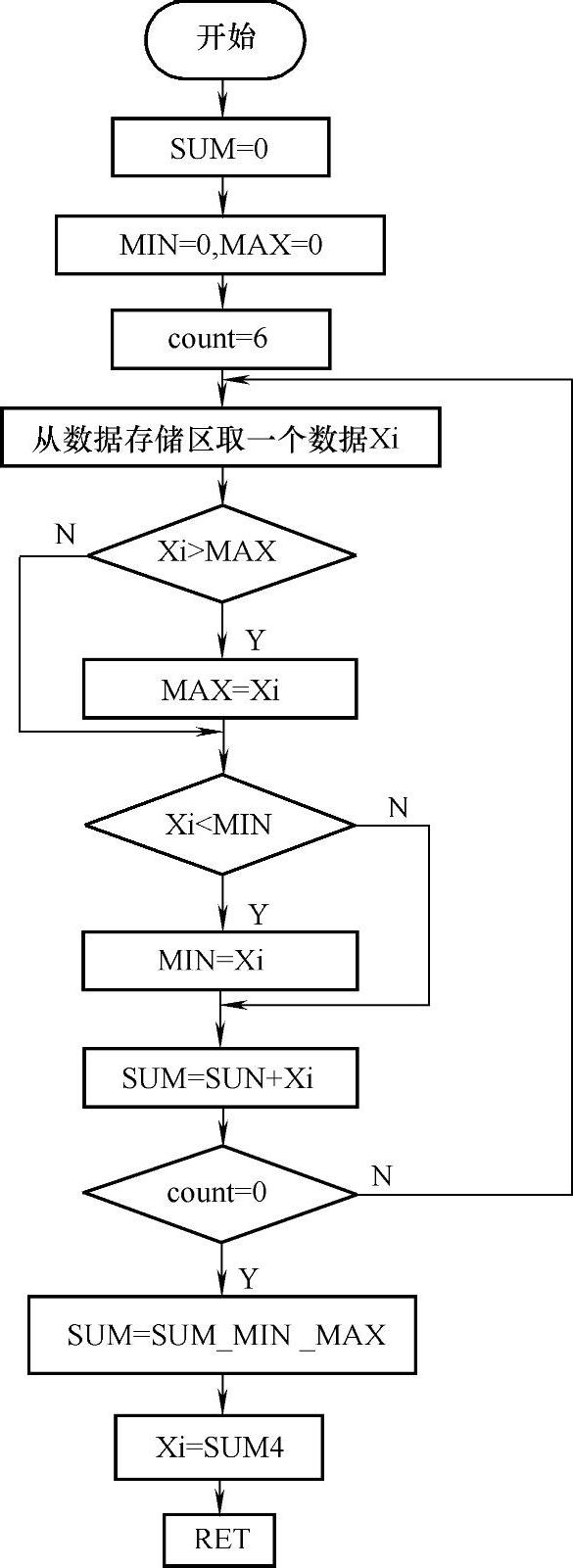
图8-10 数字滤波子程序流程图
2)要保证有足够的起动电流,以提高响应时间;
3)由于电动助力转向系统中的电动的工作状态的特殊性,经常处于频繁的起制动状态,因此为了提高响应性,还需要在控制过程中对电动机的状态进行跟踪。
电动机的状态体现在两个方面:
1)电动机静止还是转动,决定是否进行减压起动。
2)电动机的正、反转状态,决定了助力电流是否可以直接施加。
当助力电流的方向与电动机转向不一致时,需要进行先制动后起动的方法进行起动处理。具体流程如图8-11所示。
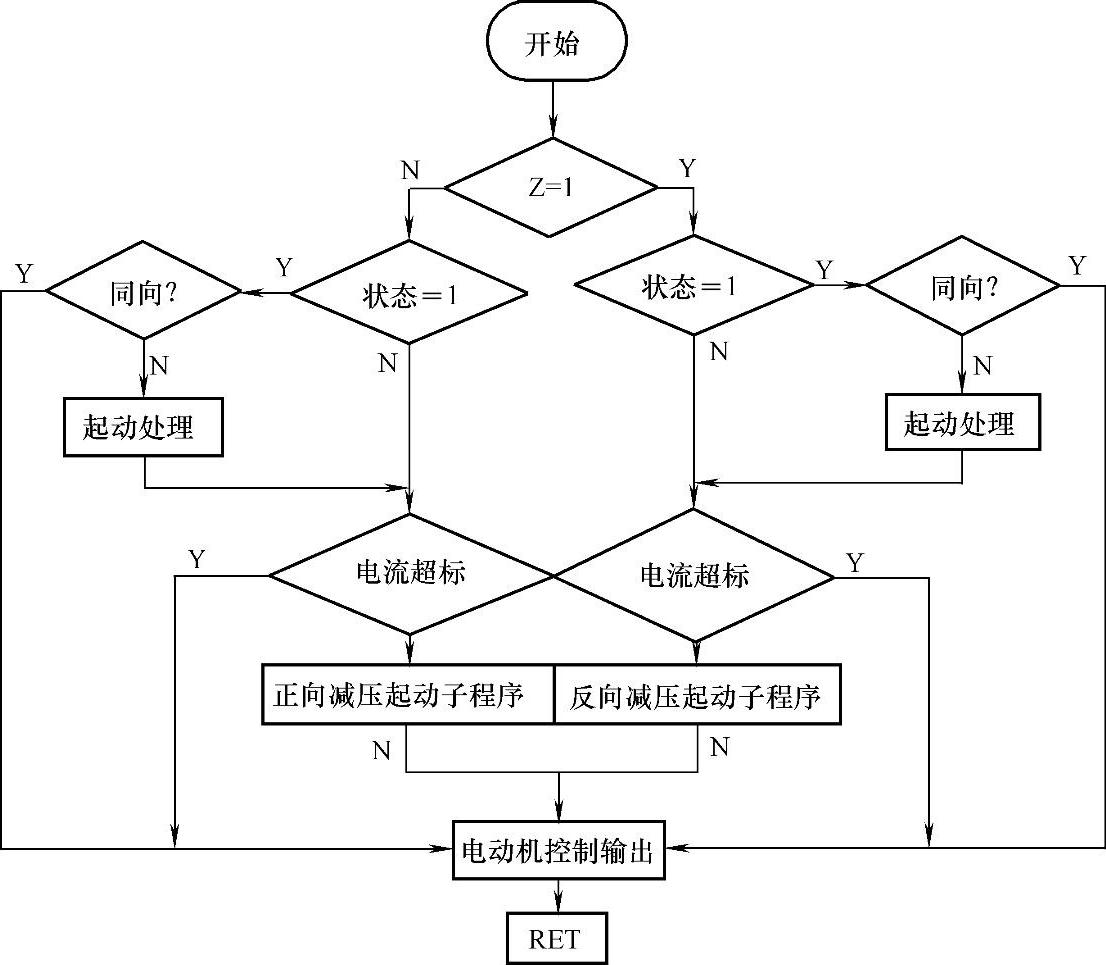
图8-11 电动机控制流程图
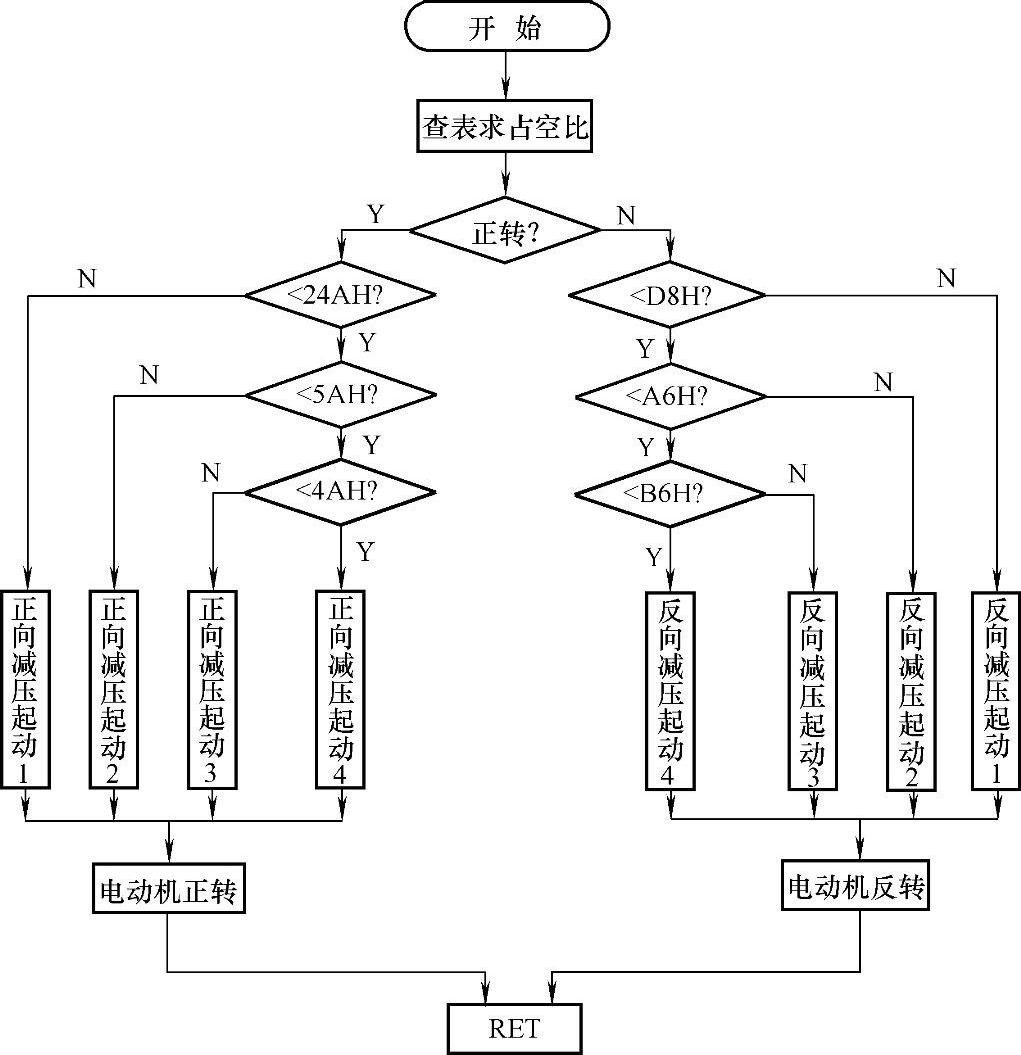
图8-12 电动机起动流程图
其中,“状态”用于判断电动机静止与否;“起动处理”部分是考虑到在急速反向的情形下电枢电流过大,而考虑先制动,后起动提供辅助力的处理思路。Z=1是转向判断中确定的希冀电动机的转动方向。
图8-12是电动机起动的子程序。根据测量到的扭矩的大小决定如何进行处理,目前提供四种助力的方式。扭矩较小时直接提供助力、大于临界值时提供减压起动、超过电动机的助力限度范围时作满负荷处理。区分正反转的原因在于在正反转情况下电动助力转向系统的占空比的数值大小趋向的差异性。因为在中值两侧,正转是正序,也即数值大则占空比响应代表的电枢电压就大;而反向是逆序。图8-12中的转向判断就是为了解决这一问题。
8.3.5.7 电动助力转向系统软件总体流程图
根据前面的介绍,可得到电动助力转向系统的总体流程图如图8-13所示。

图8-13 电动助力转向系统总体流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





